
基于点云数据的排土场安全挡墙提取方法研究
2024-01-01 00:00:00杨巍郭航伸吴怡璇桓柳毛亚纯
今日自动化 2024年6期
[摘 要]安全挡墙作为排土场安全措施之一,用来保障排土场正常作业,避免排岩车辆未保持安全卸载距离导致车辆滑落。文章提出基于无人机点云数据的排土场安全挡墙提取方法。以辽宁省鞍山市齐大山铁矿排土场点云数据作为数据源,利用坡度滤波算法提取排土平台点云数据,再对其进行alphashape边缘提取算法来提取出安全挡墙一侧的边缘点云数据,再根据高程约束与向量叉乘位置判别来提取安全挡墙点云数据。通过对安全挡墙进行三维可视化建模实现安全挡墙的监测。
[关键词]无人机点云;安全挡墙;坡度滤波算法;alphashape边缘提取算法
[中图分类号]P231 [文献标志码]A [文章编号]2095–6487(2024)06–0168–03
Research on the Extraction Method of Safety Retaining Walls in Waste Disposal Sites Based on Point Cloud Data
YANG Wei,GUO Hangshen,WU Yixuan,HUAN Liu,MAO Yachun
[Abstract]As one of the safety measures for the dumping site, the safety retaining wall is used to ensure the normal operation of the dumping site and avoid the sliding of vehicles due to the failure of rock dumping vehicles to maintain a safe unloading distance. This article proposes a method for extracting safety retaining walls in waste disposal sites based on unmanned aerial vehicle point cloud data. Using the point cloud data of Qidashan Iron Mine dumping site in Anshan City, Liaoning Province, China as the data source, the slope filtering algorithm is first used to extract the point cloud data of the dumping platform. Then, the alphashape edge extraction algorithm is applied to extract the edge point cloud data on one side of the safety retaining wall. Finally, the safety retaining wall point cloud data is extracted based on height constraints and vector cross product position discrimination. Monitoring of safety barriers is achieved through three-dimensional visualization modeling of safety barriers.
[Keywords]drone point cloud; safety retaining wall; slope filtering algorithm; alphashape edge extraction algorithm
随着矿山的不断开采,排土场的高度持续增高,出现了大量高陡排土场边坡。为了保障排岩车辆在进行卸载时保持安全距离,避免在排土场边缘发生滑落,有必要设立与监测排土场安全挡墙。
传统排土场安全挡墙的安全巡检多以人工到现场进行目视检查为主。目前,已有不少国内外学者对激光点云数据的滤波方法进行了研究。在机载方面,文献[1]提出了自适应TIN三角网加密方法处理城市区域机载数据。该方法根据少量的种子点建立一个稀疏的TIN,然后通过迭代方法依据参数阈值对TIN进行不断加密。文献[2]提出了一种基于坡度变化的滤波算法,算法的关键在于选择合适的坡度阈值,认为应当根据实验区域地形的先验知识选择坡度阈值,由于需要包含所有地面形态的样本,增大了算法的难度。文献[3]提出利用不同尺寸窗口进行多次数学形态学滤波的方法,从最小窗口尺寸开始,对每个判断为地面点的数据根据窗口尺寸的大小赋予权值,逐步增加窗口尺寸,迭代处理,窗口越大,权值越大,最终根据所有判断出的地面点的权重计算地形表面。
安全挡墙的特征不明显,导致常规地面滤波方法无法实现安全挡墙的提取,为此文章通过提取安全挡墙与排土场平台之间的界线,再通过高程约束与向量叉乘位置判别来提取安全挡墙点云数据。
1 数据获取及预处理
1.1 实验数据
选择辽宁省鞍山市齐大山铁矿排土场,并以大疆M300 RTK无人机搭载激光雷达禅思L1获取的排土场点云数据作为数据源开展研究。排土场位置无人机正射影像如图1所示。

1.2 数据预处理
排土场点云数据存在航带重叠区域,导致重叠区域的点云密度远大于非重叠区域,为了后续算法能获得良好效果,利用格网下采样算法对排土场点云进行预处理,以此实现点云数据的下采样,改善点云数据密度不均的问题。
2 研究方法
2.1 排土平台点云提取
排土场卸载区的平台区域地形平坦,该区域点云点与点之间的坡度变化较小,而安全挡墙近似梯形或三角形,使得安全挡墙点云点与点之间坡度变化较大。因此,需使用坡度滤波算法实现对排土场平台与边坡点云的提取。具体步骤如下。
(1)使用坡度滤波来提取出高程梯度较小的点云。
(2)给每个点云赋予对应的格网索引。
(3)确定划分的每个格网中z坐标最小的点,格网中的其他点分别与该点进行相对高程及坡度计算。
(4)根据设定的高程阈值H及坡度阈值G,将小于高程阈值H和坡度阈值G的点提取出来,实现平坦区域点云提取,将大于高程阈值H和坡度阈值G的点提取出来,实现陡峭区域点云提取。
2.2 排土界线特征点提取
排土场平台与安全挡墙的分界点提取是间接提取安全挡墙的重要步骤。为了成功提取安全挡墙,需要实现排土场平台靠近安全挡墙那一侧的边缘点云的提取,为此在alpha shape边缘检测算法的基础上,通过欧式聚类[4]提取出来的安全挡墙顶部点云数据来对边缘点云进行最邻近约束,实现排土界线的提取。
首先找到边界点云数据的质心点,计算每个点与该点连线到x轴正方向的夹角,排序则为排序结果为逆时针,夹角从大到小的顺序排序,则排序结果为顺时针。根据夹角的大小进行排序。按照夹角从小到大的顺序再通过遍历边坡点云对有序边界点进行最近邻搜索,在边坡点云的约束下实现有序排土界线特征点的提取如图2所示。

2.3 排土场安全挡墙提取
安全挡墙完全在上述线状点云的一侧,为了避免提取安全挡墙时,提取出线状点云另一侧的非安全挡墙点云,需要判定安全挡墙点云与线状点云的位置关系,来实现安全挡墙的提取。
(1)在工程实际应用中,NURBS(非均匀有理B样条)算法可以精确描述空间曲线的姿态,为此本研究引入NURBS算法来拟合优化台阶特征线。该方法主要通过调整和控制顶点来实现线条拟合。
(2)文章基于条件约束的安全挡墙提取算法实现安全挡墙的提取。
其中条件约束主要从两部分来约束,具体如下。
(1)基于半径邻域搜索的高程约束部分,通过遍历提取出来的排土场平台与安全挡墙交界处的线状点云中的每个点,以每个点为中心点,对整个排土场点云数据进行半径搜索,并对搜索出来的点与对应的中心点的高程进行比较,通过设定的高程约束条件实现安全挡墙的初步提取。
(2)基于矢量叉乘来判定安全挡墙点与非安全挡墙点,实现安全挡墙点云数据的细化提取。通过遍历上述从小到大排好序的线状点云数据,计算两两相邻点XOY平面的向量,并以线状点云为中心,对初步提取的安全挡墙点云数据进行半径搜索,计算搜索中心点与搜索点的向量,进行叉乘。若上述排序为顺时针,只提取叉乘结果大于0的点,即位于线状点云左侧的安全挡墙点。若上述排序为逆时针,只提取叉乘结果小于0的点,即位于线状点云右侧的安全挡墙点。至此,实现了安全挡墙的提取(图3)。

3 安全挡墙提取精度评价
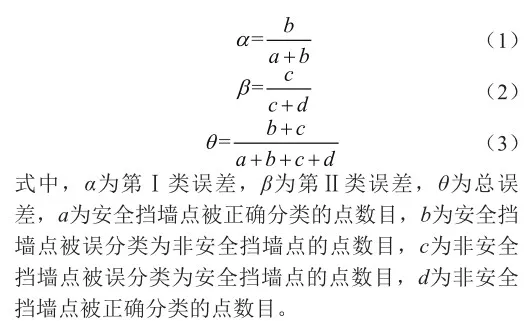
为了评估安全挡墙点集提取的精度,参考国际摄影测量和遥感学会提出的统计学误差评判标准[5],对安全挡墙提取结果的误分率分为3种:第Ⅰ类误差、第Ⅱ类误差及总误差。第Ⅰ类误差、第Ⅱ类误差反映了方法的适应性,总误差反映了方法的可行性,总误差越小则表示安全挡墙点集提取结果越精确。第Ⅰ类误差、第Ⅱ类误差、总误差的定义分别为:
利用上述评估方法对本研究排土场点云安全挡墙提取结果进行误差评定,具体结果见表1。

4 结束语
使用坡度滤波及alpha-shape等一系列算法提取排土界线,进而提取安全挡墙,该提取方法解决了传统滤波方法提取安全挡墙出现误提、漏提的情况。研究结果表明,基于排土界线进行范围约束的安全挡墙提取算法能够准确、自动地提取出排土场安全挡墙,可为安全挡墙健康评估提供技术支持,对露天矿智慧矿山建设具有重要的现实意义。
参考文献
[1] 朱晓强.基于LiDAR点云和航空影像的城市三维重建[D].合肥:合肥工业大学,2009.
[2] 赵明君,刘超,高翔,等.基于多尺度网格的点云自适应坡度滤波算法[J].合肥工业大学学报(自然科学版),2021,44(2):266-272.
[3] 张莹,张凯义.数学形态学改进滤波方法在车载激光点云滤波中的应用[J].测绘标准化,2022,38(4):81-85.
[4] 沈长表,夏永华,张坤祥,等.基于欧式聚类的车载点云道路提取[J].城市勘测,2023(3):76-81.
[5] 毛亚纯,伏雨文,曹旺,等.基于无人机点云数据的露天采场矿车提取方法[J].东北大学学报(自然科学版),2021,42(6):842-848,863.
猜你喜欢
采矿技术(2021年5期)2021-10-12 08:24:22
世界有色金属(2020年21期)2020-12-08 12:41:33
中国设备工程(2019年17期)2019-09-24 09:25:14
城市道桥与防洪(2019年5期)2019-06-26 00:56:04
中国资源综合利用(2017年2期)2018-01-22 02:45:12
电气化铁道(2016年4期)2016-04-16 05:59:46
河北遥感(2015年2期)2015-07-18 11:11:14
医学研究杂志(2015年4期)2015-06-10 06:42:43
中国工程咨询(2015年4期)2015-02-14 03:49:58
河南科技(2014年1期)2014-02-27 14:04:16
