
基于5G网络的智能无人巡检系统设计与应用研究
2024-01-01 00:00:00翟芮晨
今日自动化 2024年6期
[摘 要]为提高基础设施巡检的安全性和效率,文章采用5G网络技术设计实现了智能无人巡检系统。系统采用分层架构,集成高精度定位、实时图像处理和环境感知技术,保证数据传输和处理的精准性。测试结果表明,该系统在巡检效率、故障诊断精确率等方面优于传统方案,可为电力、通信等领域的智能巡检提供有效解决方案。
[关键词]5G网络;智能无人巡检;无人机
[中图分类号]TP242.6 [文献标志码]A [文章编号]2095–6487(2024)06–0051–03
Design and Application Research of Intelligent Unmanned Inspection System Based on 5G Network
ZHAI Ruichen
[Abstract]In order to improve the security and efficiency of infrastructure inspection, this study adopts 5G network technology to design and implement an intelligent unmanned inspection system. The system adopts a layered architecture, integrating high-precision positioning, real-time image processing, and environmental awareness technology to ensure the accuracy of data transmission and processing. The test results show that the system is superior to traditional solutions in terms of inspection efficiency and fault diagnosis accuracy, providing an effective solution for intelligent inspection in fields such as power and communication.
[Keywords]5G network; intelligent unmanned inspection; unmanned aerial vehicle

1 系统设计
1.1 系统构架
智能无人巡检系统如图1所示,采用分层设计,包含数据采集层、网络通信层和实际应用层。数据采集层由无人机搭载的多种传感器组成,执行多维度数据采集任务。网络通信层通过5G通信模块实现无人机与地面控制中心间的高速、实时、可靠数据传输。实际应用层包括数据处理中心、决策支持系统和运维人员,负责分析数据、提供故障诊断和维修决策支持。该分层架构提升了整体工作效率和可靠性,保障了基础设施的安全运行。
1.2 平台设计与改装
5G–无人机通信传输如图2所示。智能无人巡检系统以中型固定翼无人机为硬件平台主体,在无人机上集成了5G通信终端、高清视觉系统、激光雷达等多种传感器,实现了多源异构数据的实时采集和传输。无人机平台具有航程远、载重大、续航时间长等优势,可大范围、长时间执行巡检任务。为提高其适应性和可靠性,对无人机平台进行了多方面改装:增加了2个副翼,提高了机身空气动力学性能;在机身底部加装了减震支架,以减小着陆冲击对载荷的影响;在机翼根部安装了防冰加热装置,提高其在恶劣天气下的工作能力。5G通信终端是实现无人机远程控制和数据传输的关键部件,该终端采用了骁龙X60基带芯片,支持5G毫米波和Sub–6 GHz双模,具有高达7.5 Gbps的峰值下行速率,可实现4k/8k高清视频的无延迟传输。

1.3 环境感知单元
系统的环境感知单元由气象感知、高精度定位和智能避障3个模块组成,确保无人机在恶劣环境下安全可靠地执行巡检任务。气象感知模块监测风速、温湿度、大气压等气象状况,使无人机能及时调整飞行参数或返航以规避风险。高精度定位模块集成北斗/ GPS导航、视觉测距和激光测距技术,提供精确的定位和导航。智能避障模块结合毫米波雷达和双目相机,进行远近距离障碍物探测和分类识别,规划最优航线实现精准避障。
2 软件系统设计
2.1 5G–无人巡检通信方案
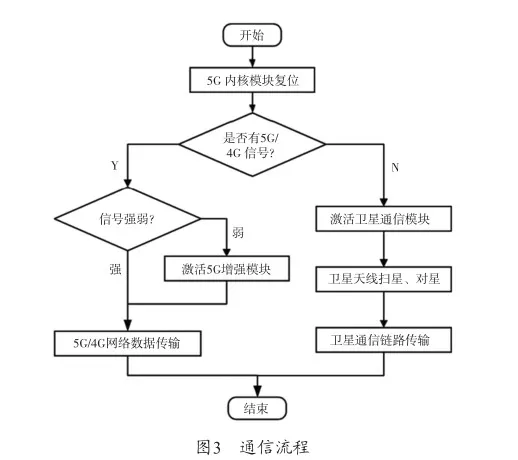
5G移动通信网络作为系统的主通信渠道,在复杂地形或偏远地区也不可避免地存在覆盖盲区和信号空洞,所以引入卫星通信作为备份补充。当无人机飞临无5G信号覆盖区域时,卫星通信链路将自动启用,接管数据传输任务,确保关键控制指令和告警信息能够及时送达,维护巡检作业的连续性。5G和卫星通信各自承担不同的数据传输任务,两者通过智能路由选择和无缝切换机制高效衔接,构建了无缝覆盖、高可靠的通信网络。无人机在整个巡检过程中,始终与地面控制中心保持连接,畅通无阻地接收指令、上传数据,大幅提高了作业效率和安全性。通信流程如图3所示。
2.2 图像收集与识别程序设计
该模块采用模块化和层次化设计,包括图像获取、预处理、特征提取和目标识别4个子模块。图像获取层实时采集目标图像;预处理层对原始图像进行去噪、增强和校正;特征提取层应用SIFT、HOG等算法提取图像低级特征;目标识别层结合深度学习技术,对异常情况进行智能识别和分类。巡检过程中,模块根据不同目标采用针对性识别策略,如输电线路识别通过霍夫变换确定中心线,局部扫描识别绝缘子缺陷等;铁塔识别先确定塔型,再检查连接点、焊缝等,判断是否存在锈蚀、开裂等问题,为检修提供精确数据支持。
2.3 应用软件设计
将控制端制作成App形式,操控员可以使用手机、电脑或车载移动端进行操作,包含操作控制、状态监视、天气监测、数据管理等模块,实现了无人机及其荷载的一站式管理控制。操作控制模块提供直观高效的人机交互界面,支持智能辅助决策;状态监视模块可视化展示飞行数据并设有告警机制;天气监测模块集成多种传感器,提供实时气象信息;数据管理模块则负责多源数据的存储和分发。该软件系统操作简便、功能完备,有力支持了无人机巡检作业的高效开展。应用软件构架如图4所示。

3 系统测试结果
3.1 无人机飞行测试
为确保无人机在不同磁场干扰环境下能够安全起飞和飞行,进行了一系列飞行测试。测试方案是在具有磁场干扰的不同高度的平台上放置无人机,观察其是否能够正常起飞和飞行,无人机起飞高度与飞行状态统计见表1。
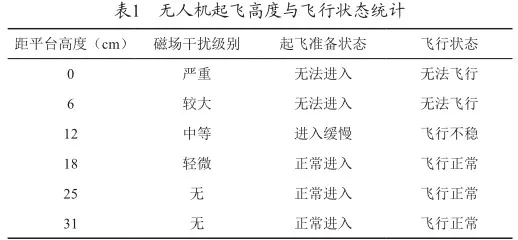
由表1可知,为了确保无人机巡检系统的安全运行,需要满足一定的最低起飞高度,建议不低于15 cm,在该高度下,无人机可以顺利起飞,执行规划好的巡检任务。
3.2 无人机精准降落测试
采用相同型号无人机,针对不同场景进行了为期1周的降落精度测试,试验结果见表2。由表2可知,每次落地差都控制在5 cm以内,满足无人机降落后中心轴距与目标点实际水平距离误差不超过5 cm的要求。与传统GPS定位技术相比,该无人机精准降落系统展现出了更高的精度水平,定位误差明显小于GPS米级定位精度。

3.3 巡检测试
巡检测试结果见表3,与传统巡检方案相比,该智能无人机巡检系统在巡检路径、时间、故障发现时效、诊断精确率、定位精度和信息处理效率等关键指标上均展现出了卓越性能。该系统自动化、智能化和远程操作的优势,使其在提高巡检效率、提升故障诊断水平和运维质量方面具有明显优越性。

4 结束语
文章成功设计并实现了一种基于5G网络的智能无人巡检系统,其通过整合高精度定位、实时图像处理和环境感知等先进技术,有效提升了电力、通信等基础设施巡检的安全性、效率和准确性,显著降低了人力成本和操作风险。未来工作将重点研究系统在复杂环境下的适应性优化和数据处理算法的进一步提升,以满足更广泛应用场景的需求。
参考文献
[1] 吕文祥.基于物联网技术智能巡检系统设计研究[J].信息记录材料,2024,25(1):81-83,86.
[2] 夏德喜,刘浩满,芦璐.无人机自动化巡检技术在光伏电站中的应用[J].太阳能,2023(12):74-81.
[3] 陈平.基于无人机图像的铁路周边环境隐患智能分析方法研究[D].北京:北京交通大学,2023.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21 09:35:30
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01 06:27:42
幽默大师(2020年11期)2020-11-26 06:12:12
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
摄影之友(影像视觉)(2019年3期)2019-03-30 01:37:20
摄影之友(影像视觉)(2019年2期)2019-03-05 08:27:26
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:20
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
文理导航·教育研究与实践(2015年12期)2015-12-04 00:49:23
