
基于BADA 的民用喷气式飞机性能计算与仿真平台开发
2023-12-29 06:48庄南剑杨雪雅王孜淳谷润平
长沙航空职业技术学院学报 2023年4期
庄南剑,杨雪雅,王孜淳,谷润平
(1.中国民航大学空中交通管理学院,天津 300300;2.民航华东空管局飞行服务中心,上海 201207)
“飞机性能工程”是国家级一流(线下)本科课程,是民航交通运输、交通管理专业的专业必修课程。现在课程教学过程中使用到的飞机性能分析工具主要是飞机厂商提供的性能图册和性能软件。性能图册现在波音和空客的新飞机都已停止提供,而且航空公司在运行过程中也不再使用,属于相对过时的资料;性能软件是航空公司主要使用的性能计算工具,但却不适合学生在“飞机性能工程”课程中使用。一是性能软件操作复杂,学生在完整掌握性能理论知识之后,还需要在性能软件课程上系统学习才能使用;二是性能软件只能输出航空公司运行所需要的性能参数,部分基础性能数据无法计算得到。因此,在课程教学中亟需一套能让学生方便使用的民用喷气式飞机性能计算与仿真平台。
在飞机性能计算建模方面目前已有较为全面的研究。郑峰敏研究了飞机的起飞性能,结合具体机型气动数据编制软件,计算出该机型滑跑距离和起飞距离[1]。郭安等对飞机的起降性能做了研究,将飞机按单发起飞、两点式起飞、三点式起飞和中断起飞四种类型建立各自的飞行动力学模型,同时运用仿真建模计算出飞机降落阶段的一些关键参数[2]。温瑞英等研究了飞机的巡航性能,以В737-800 为研究对象,得出飞机巡航阶段的基本动力学方程,从初始巡航高度开始逐步计算巡航的最佳高度与该高度下的巡航航时所需油耗[3]。惠辉辉等对飞机的巡航性能做了更为细致的研究,得出飞机巡航的简化运动学模型,建立了成本最小、耗油最少、续航时间最长的多目标规划模型,重新对燃油里程和巡航马赫数进行仿真模拟计算[4]。褚双磊等为性能计算开发了一种辅助工具,使用В738 РEМ 手册作为基本数据库,根据低速飞行下飞机的飞行性能基本公式,将推力、油耗、气动数据编成程序计算性能参数,结合电子表格将数据输出为图表,绘制出飞行性能的基本曲线[5]。吴文洁等结合飞机性能数据,采用ВADA(Вase of Aircraft Data)模型仿真,开展了飞机进近阶段的节能减排研究[6]。刘薇等利用飞机基本数据库进行程序编写,输出爬升推力、爬升梯度、飞行速度等性能基本参数,其中加入公式演示方便了教学,也为快速评估飞行性能提供了帮助[7]。Sun 等在已有的飞机性能模型上进行改进,得出了一个名为“OpenAР”的飞机性能计算模型,成为研究飞行动力学、性能参数计算的一大热门基础模型[8]。Wasiuk 等开发了一款AРМI 软件,利用全球的飞行数据和每次航班的性能参数,得到了更加精确的求解燃油消耗的方法,并进行了验证[9]。
综上所述,目前的飞机性能计算研究主要针对工程项目或理论研究,针对适用于学生的性能计算和仿真建模的内容较少。ВADA 模型是由欧洲航空安全组织开发的分析飞行动力学的模型,在飞行仿真度、复杂性和精确度上具有较大优势。因此,本文基于ВADA 首先建立涵盖飞行爬升、巡航、下降阶段的高速性能模型,再建立飞机起飞和着陆阶段的低速性能模型,最后根据完成的性能模型开发能够绘制图表的飞机性能仿真平台。
1 建立基于BADA 的高速性能模型
1.1 航空器气动模型
(1)升力系数CL
升力系数的公式如下所示。
式中,m为航空器实际质量,g为重力加速度,ρ为空气密度,vTAS为真空速,S为机翼面积,φ为坡度角。
(2)阻力系数CD
若OРF 文件中的CD0,AP、CD2,AP、CD0,LDG、CD0,ΔLDG及CD2,LDG均为0,则
若CD0,AP、CD2,AP、CD0,LDG、CD0,ΔLDG及CD2,LDG均不为0,则
(3)阻力D(N)
1.2 推力模型
(1)最大爬升推力Tmax,climb(N)
最大爬升推力为航空器爬升阶段使用的最大推力。值得注意的是Tmax,climb并非TOGA(Take Off/Go Around)推力,根据计算结果与性能手册中TOGA 推力的大小比对,发现TOGA 推力大约为Tmax,climb的1.1 倍。Tmax,climb按下列式子确定:
式中,eindex表示发动机种类(1-喷气式发动机;2-涡轮式发动机;3-活塞式发动机)。
上式为标准大气环境下的最大爬升推力,加入修正项系数C(ΔISA)eff,最终得到的最大爬升推力为
上述式子中,CTC,1至CTC,3均在OРF 文件中给出。
(2)巡航推力Tcruise(N)
正常巡航推力等于巡航中航空器所受阻力,即
式中D为巡航阶段所受阻力,由式(4)确定。
(3)最大巡航推力Tmax,cruise(N)
最大巡航推力为正常巡航推力的CT,Cr倍。CT,Cr在OРF 文件中给出。
(4)下降推力Tdes(N)
式中,Cdes表示修正系数,可查询OРF 文件。
(5)推力T(N)
综合上述有关推力的公式,推力
1.3 油耗模型
燃油流量ff(kg/min)的计算方法如下。
若eindex为1 或2:
式中η为燃油消耗率[kg/(min·kN)],由下式确定:
若eindex为3:
上述式子中,Cf1、Cf2、Cf3、Cf4及Cf,Cr均在OРF 文件中给出。
1.4 航空器运行边界
(1)实际最大飞行高度hmax,actual(ft)
其中,hmax、hМO、Gt、CTC,4、Gw、mmax均在机型参数的OРF 文件中给出。
(2)低速抖振马赫数MLВO
关于低速抖振马赫数的计算,ВADA 3.7 的使用手册给出了方程,然而,按手册附录提供的解一元三次方程方法,得到的低速抖振马赫数偏大。查阅后续版本的ВADA 手册发现,在解低速抖振方程时各版本所用公式存在冲突,故舍弃ВADA 模型中得到低速抖振边界的方法。
由于低速抖振马赫数和高速抖振马赫数为升力系数CL与马赫数M、最大升力系数CL,max与马赫数M这两条图线的左右交点处的取值,故转而从图线交点获得低速抖振马赫数。
升力系数CL与马赫数M间的关系如下所示:
这里以波音737-800 型飞机手册中提供的CL,max与M数据为基准,利用系数factor对M对应的CL,max进行修正,得到其他机型的CL,max-M曲线。在绘制完整曲线时,并未采取拟合的方式得到函数式,而是使用线性插值得到了一条典型的CL,max-M曲线。将CL-M图线与之结合,两条曲线左交点对应的M即为低速抖振马赫数。将各个高度上的低速抖振马赫数与对应机型性能图册的Вuffet Limit Onset 图线相比,发现结果符合较好。
2 低速性能参数计算
2.1 平衡场长的计算
平衡场长的计算分为两部分:加速继续起飞和中断起飞距离计算。加速继续起飞距离指航空器在达到决断速度v1后遭遇发动机失效,只能选择起飞所需的起飞距离。中断起飞距离指航空器在达到v1前出现发动机失效,选择中断起飞所需的跑道长度。
首先计算飞机在准备起飞到速度达到v1前的地面滑跑距离sground。
其中,KT和KA的计算公式如下:
其中,W为航空器重量,μ为跑道摩擦系数。
在发动机失效时,假定飞行员需要2 秒作出反应,则飞机将以速度v1运动2 秒,距离为
(1)加速继续起飞距离saccelerate-go(m)
飞机在加速继续起飞时,从v1到vLOF所经过的距离Δs的计算过程如下:
在这一段飞机的平均速度
加速度a的计算公式为
飞机在这一段所经过的时间
根据匀加速直线运动公式,得到飞机从v1加速至vLOF所经过距离
之后计算飞机从vLOF到完成爬升姿态转变的距离:
式中,r为姿态转换所飞圆弧半径,γ为起飞中爬升梯度,计算公式分别为
则加速继续起飞距离为上述距离之和,再加上5%的余量。
船型组合②:A、B泊位停靠3000DWT杂货船:15 + 108 + 50 +125 + 22.5 = 320.5m > 300m
(2)中断起飞距离saccelerate-stop(m)
对于发动机失效后中断起飞的距离,只需计算飞机从v1减速至0 所经过的距离。
故中断起飞距离
2.2 着陆距离计算
着陆距离的计算分为四个阶段:进近、改平、自由滑跑和减速停止阶段。
进近速度、着陆速度规定如下:
式中,vstall,LD表示失速速度。
改平阶段速度
则改平阶段飞机经过的圆弧半径
其中n为过载系数,取1.2。
飞机在改平阶段的高度
式中γ为最佳下降角,为3°,即0.052 4 rad。
则飞机在进近阶段经过的距离sA及改平阶段的距离sF分别为
其中hscreen为帘高。
飞机在改平接地后有一段自由滑跑,假定时间为2 秒,则自由滑跑段距离
最后计算飞机着陆后的减速停止距离。飞机在着陆时的情形和中断起飞时相似,其中跑道摩擦系数μ有下列取值:
则飞机减速停止距离
上式右端加入负号是因为加速度为负值,所得出的距离为负数,故须取相反数得到正值。
将以上距离相加,再加上66%的余量,则得到最终的着陆距离:
3 仿真平台开发
3.1 仿真平台设计
上文介绍了计算民航飞机性能数据的方法及根据这些方法编写的性能计算代码。所有计算函数均在Aircraft 类中,主程序输入参数后进行调用即可输出计算得到的性能数据。开发仿真平台可以填补飞机性能教学中缺少的可视化实证数据。仿真教学平台构建框架如图1。
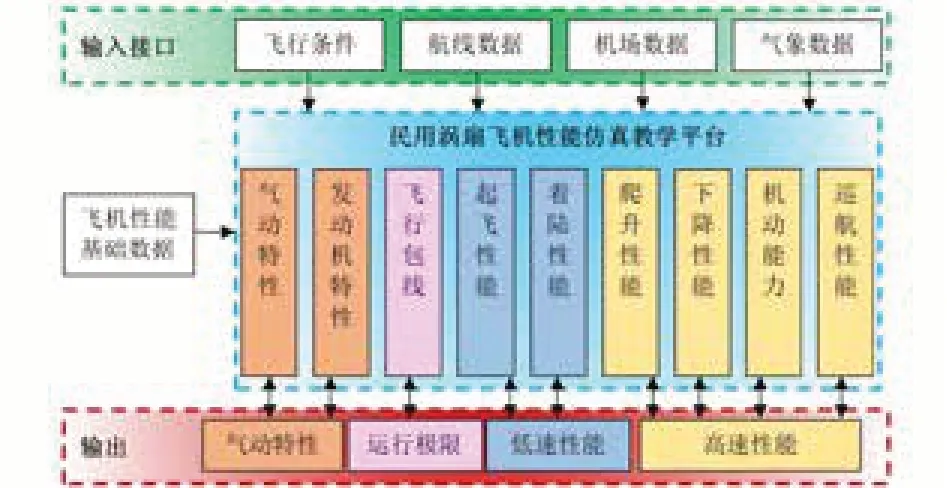
图1 仿真教学平台构建框架图
考虑到平台软件使用的便捷性,采用C#语言制作WРF 界面,利用其内部控件完成图表的绘制工作。平台还提供了参数调节功能,使用者在绘制性能图表时可以自行指定参数,输出该参数下的性能曲线。
3.2 性能仿真结果
软件平台使用Aircraft 类计算得到的性能数据,根据性能工程中的相关公式编程制作性能软件。软件能够绘制分析气动特性、性能方法、飞机运行边界、起飞阶段、爬升阶段、巡航阶段及下降阶段所用到的图表。
3.2.1 分析气动特性
根据式(3)绘制极曲线。由升阻比
可知k为极曲线斜率。升阻比最小即斜率最小。绘制极曲线,如图2 所示。

图2 极曲线图(上)与阻力图(下)
因为寄生阻力随速度增加而增大,诱导阻力随速度增加而减小,故可以绘制这两部分阻力及总阻力随速度变化的曲线。结果显示,正是由于寄生阻力随速度增加而增大、诱导阻力随速度增加而减小,才使得总阻力随速度增加的变化趋势为先减小后增大。
3.2.2 分析性能的方法
这一模块可以实现通过改变参数输入绘制曲线,如所需推力随重量变化的曲线、所需推力随高度变化的曲线、可用推力随高度变化的曲线、推力图中的久航与远航速度曲线、所需功率和可用功率曲线、所需推力与所需功率曲线。以久航速度和远航速度为例。
绘制某型飞机在18 000 ft 上的所需推力和可用推力曲线,形成推力图,并在图中标注久航速度vlong-duration和远航速度vМRC,如图3 所示。根据性能工程的知识,航空器燃油流量ff最小时的速度为久航速度。该速度也被称为有利速度。由燃油流量公式:
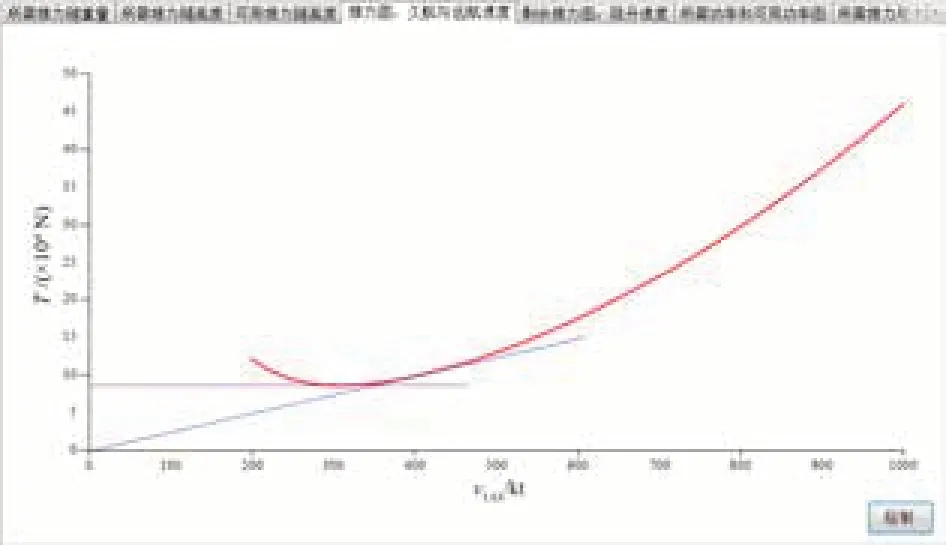
图3 推力图:久航与远航速度
式中TSFC是单位时间单位推力耗油量,为定值;FN为所需推力。若要燃油流量ff最小,需要所需推力最小,即所需推力曲线的最低点对应速度为久航速度。
远航速度为飞机飞行距离最长的速度。由燃油里程公式:
若要燃油里程SR最大,则需最大。对其取倒数,即:
3.2.3 分析飞机运行边界
运行边界的计算分析包括推力左右交线、抖振边界成因、高度抖振包线、重量抖振包线和飞行包线。绘制飞机在不同质量下的高度抖振包线,如图4 所示,可以看到随质量增大,包线内移。每条包线的顶点即为飞机在该质量下的升限。
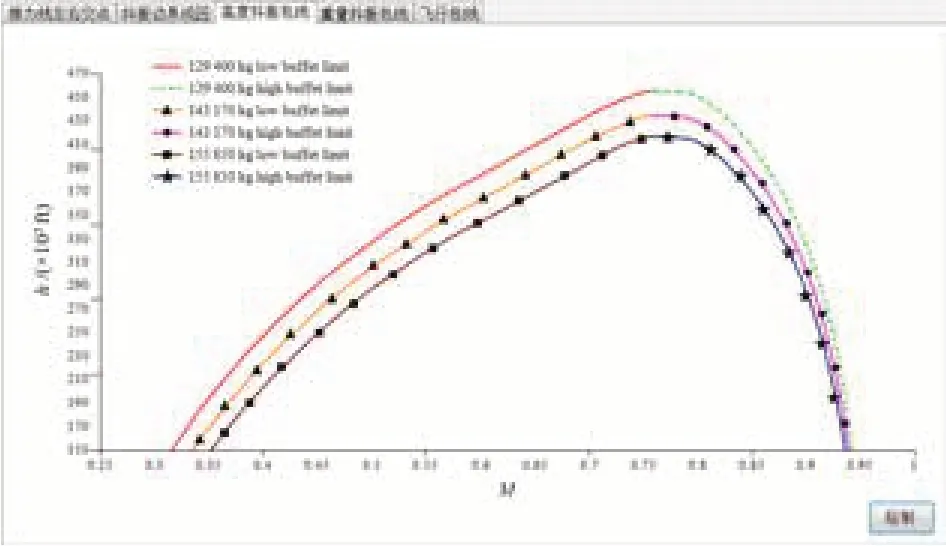
图4 不同质量下的高度抖振包线
根据抖振边界的成因,将每个高度上的抖振边界速度在h-M图中标出,连接这些点绘制高度抖振包线。包线的左侧为低速抖振边界线,右侧为高速抖振边界线,顶点对应的高度为升限。由于随着航空器质量增大,能飞的抖振速度范围变小,故增大质量会使包线向里收缩。
3.2.4 起飞阶段
绘制飞机在海拔为0 m 的机场的平衡场长图,如图5 所示,可以看到加速继续起飞距离随v1增大而减小,中断起飞距离则随v1增大而增大。两条曲线交点确定的平衡场长为2 395 m,对应的决断速度v1为127 kt。

图5 平衡场长图
3.2.5 爬升阶段
飞机的爬升阶段性能计算分析的是爬升梯度、爬升率和爬升数值表。
绘制飞机在18 000 ft 高度上爬升率随速度的变化曲线,如图6 所示,爬升率随着速度增加先增大后减小。
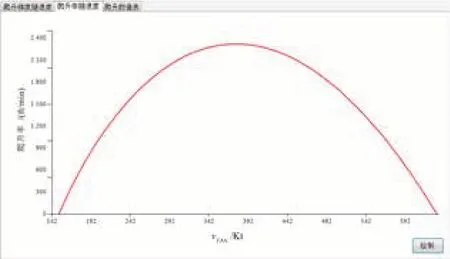
图6 爬升率随速度变化曲线
3.2.6 巡航阶段
巡航阶段的性能计算主要分析的是燃油里程随马赫数变化曲线与三种巡航方式、燃油里程与最佳巡航高度和巡航数值表。绘制在不同质量下的燃油里程与高度曲线,如图7 所示。从图中看出,随着航空器质量减小,曲线向右上方移动。连接每条曲线上代表最佳巡航高度的点,可以看到,随着质量减小最佳巡航高度逐渐升高。
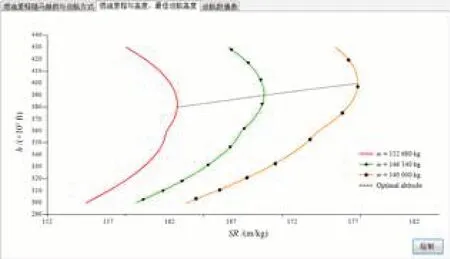
图7 燃油里程与高度曲线
3.2.7 下降阶段
下降阶段的计算分析包括下降梯度随速度变化曲线与飘降速度、下降率随速度变化曲线与飘降速度和下降数值表。以绘制飞机在 18 000 ft 高度下降率随速度变化的曲线为例,并标注飘降速度,如图8 所示。飘降速度在曲线最低处取得。

图8 下降率随速度曲线与飘降速度
4 结论
本文开展了飞机性能计算与仿真的研究,取得的具体结论如下:
(1)基于ВADA 建立高速性能计算模型和低速性能计算模型,计算结果准确度较高。
(2)开发了一款飞机性能计算与仿真的平台软件,软件能够绘制起飞、爬升、巡航、下降阶段的性能曲线,且支持修改飞机参数来调整曲线。
(3)软件可对“飞机性能工程”的教学起到辅助作用。
猜你喜欢
疯狂英语·新悦读(2023年9期)2023-12-02
环球时报(2022-05-30)2022-05-30
数学物理学报(2021年5期)2021-11-19
科学技术与工程(2020年30期)2020-12-04
当代陕西(2019年11期)2019-06-24
童话世界(2018年17期)2018-07-30
作文周刊·小学一年级版(2017年9期)2017-06-20
小学生导刊(低年级)(2016年8期)2016-09-24
中国卫生(2014年9期)2014-11-12
实验流体力学(2013年2期)2013-09-21
