应用电网安全稳定控制装置标准化测试系统研究与开发
2023-12-29 06:25杨毅
电气技术与经济 2023年10期
杨 毅
(南京南瑞继保电气有限公司)
0 引言
随着新能源 (比如风电) 的大规模接入以及高压直流输电技术的不断发展, 电力系统的运行特性发生了巨大的变化。并且在未来相当一段时期内, 电网将长期处在一个过渡时期, 该时期电力网的安全、 稳定、 可靠、 可靠的工作状态将极大地取决于其所处的安全稳定控制系统。安全稳定控制系统是保证电网安全、 稳定的第二道防线, 它需要对电网运行信息进行实时处理, 其中包含了其所处的区域电网信息、 区域电网之间、 稳控系统内部各设备之间、 直流控保设备、 稳控系统和其他自动化系统之间的信息, 从而可以进行高速、 准确地交互, 以满足交直流混联、 电力电子化电网稳定控制的需要。
1 稳控系统标准化检测技术
一般来讲, 安全稳定控制系统由调度部门、 科研机构或高校完成, 由生产厂商完成生产、 测试和现场调试, 由专业的测试测试部门完成对系统的全面测试, 最终由调度部门完成对系统的工作。在稳定控制器的研究和开发中, 一般采用离线的电机瞬变仿真软件和实时仿真系统, 按照稳定控制器的设计要求, 实现了稳定控制器的规范化设计。在系统的组装, 出厂测试, 以及进行现场调试期间, 测试工作的工作是以厂商来进行的, 它所使用的测试工具、 测试手段是多种多样的, 并且以提升功能验证为重点。但是, 如果是由一个专门的实验测试部门来进行的, 它的整体测试具有很高的标准, 而且它的检测内容也很广泛。但是, 因为场地和规模的限制等原因, 它不能把所有的稳控装置和信道都放到实验室中来进行检测, 因此,没有充分暴露出在稳定控制器的策略, 设定值, 通讯, 次级环路等关键环节上的缺陷。在实验室中, 通过技术手段对稳控制设备之间的通信延迟时进行了模拟, 但由于测试制度的差异, 并不能将现场的稳控系统的运行特点全部包含在内。稳定控制系统的每一个部分的检测内容和缺陷见表1[1]。
根据表1 所列的试验条件践行项目对比, “√”为能够进行试验的试验, “○”为能够进行试验, 但是仿真条件不够真实; “×”是指无法进行的试验。其中,1.1 至1.6 为静态模型实验, 2.1 至2.8 为安全性及电磁兼容实验, 3.1至3.8为动态模型实验。
2 测试系统设计方案
2.1 整体框架
从图1 所示的方案可以看出, 安全稳控系统的标准化测试系统所采用的连接方式比较简单, 该测试系统包括稳控自动测试主机和子站设备等多个组件[2]。
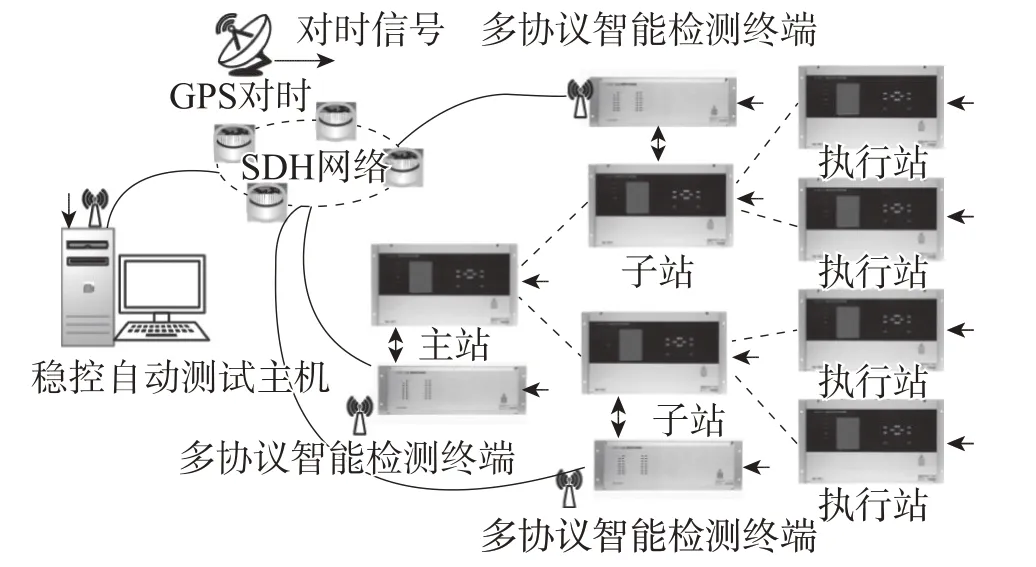
图1 测试系统整体框架
安全稳定控制自动化测试仪通过配置自动化的测试仪来实现对测试仪的人机交互, 对测试仪进行控制, 对测试仪的结果进行显示, 并生成相应的报告。它包括了人机交互处理模块等, 结构具体如图2所示。
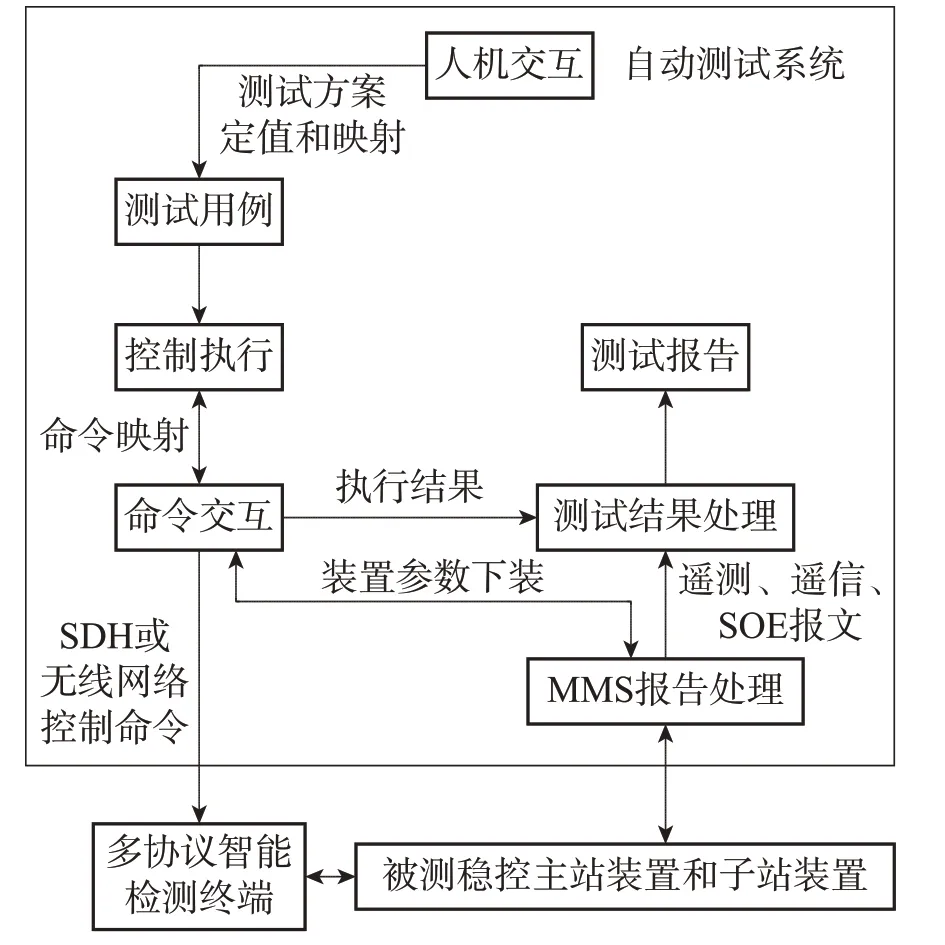
图2 自动测试系统框图
该系统具有对电压、 电流和功率等参数进行直接编辑的功能, 可以对各个参数进行设定, 使之与常规的继电保护测试器的状态序列函数相似。本装置具有电磁暂态分析数据读出功能, 可按严密的分析数据时间序列, 将各时间点的电压、 电流数据进行合成, 实现对稳控制装置采样的模拟。本系统使用C 语言编制, 兼容度较高, 使用者可以将电压、 电流、 功率计算的程序封装在一个模块内, 方便地调出, 使其与各个厂家的稳定控制器达到最佳的配合。为使现场稳控系统能够进行闭环测试, 以降低检测调试人员的工作负荷, 提高测试自动化程度, 稳控自动测试主机就诞生了。本装置利用站控MMS 通讯协议, 实现了对软盘及设定数值的遥控调节, 从而实现了装置的各项参数下装[3]。
2.2 稳控自动测试主机软件
上位机软件框架如图3 所示。稳定控制的自动化测试主机具有序列执行的能力, 它采用TCP/UDP 的方法, 将测试用例进行分配, 该方法将一个测试案例的执行周期设定为完成之前的一个案例再加上一个剩余的时间。多协定的智能探测终端在收到一组试验样本后, 会发出结束标记讯号, 稳定控制自动化试验主机可以综合并运算该讯号的时标, 估算出链路通讯延迟, 并为设定试验样本的执行期间余量, 为试验样本的运行期间余量提供一个可供选择的基准。在完成了所有的实验后, 对实验的数据进行了总结, 并形成了一份实验报告[4]。
图3 稳控自动测试主机软件框架
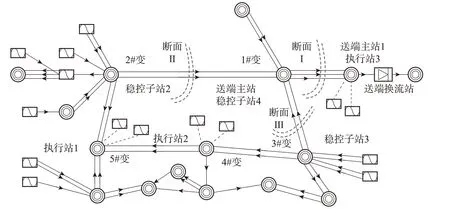
图4 稳控系统地理接线示意图
3 实验验证
稳控子站1 的职责在于识别截面Ⅰ三回线路的故障跳闸情况, 并将其传输至送端主站, 接收主站发出的速降直流功率指令, 同时接收执行站3 转发的直流系统故障信息和直流功率速降信息, 并将其转发至送端主站。在整个过程中, 需要由稳控子站和接收主站经双向通信实现同步传输。稳控子站2 的职责在于识别区间ⅠⅠ两回线路的缺陷跳闸情况, 并将其传输至送端主站, 同时接收电站机组的信息, 以便接收风力主变联网信息, 并将总可切量传输至送端主站。当需要切除某一台机组时, 会把该台机组所需的负荷分配给该机组。接收来自送端主站的指令, 其中包括直流故障切机、 交流故障切机、 线路过载切机和主变过载切机, 并根据优先级进行机组的选择。在完成以上功能后, 就能实现对电网中各变电站设备状态的监测与分析以及各种保护定值的整定计算等一系列操作。稳控子站3 的功能在于, 通过子站4 将截面ⅠⅠⅠ两回线路的本侧开关位置信息传输至送端主站, 随后, 执行站4将提供可切负载信息和负载线路的运转状况, 并根据当地策略, 向执行站下达选择切局部负载的指令。根据这些数据计算出各条输电通道内各变电站之间的距离和电压降分布情况以及输送功率大小等相关参数。稳定子站4 的职责在于监测断面Ⅰ、 ⅠⅠ、 ⅠⅠⅠ和1#变电所的运行状态, 判断断面Ⅰ三回、 断面ⅠⅠ两回、 断面ⅠⅠⅠ两回的线路是否存在问题, 并向送端的主站传递相应的运行和故障信息。具体而言, 接收子站1 传送断面Ⅰ三回的换流站侧断路器所处的位置, 接收子站2 传送断面ⅠⅠ两回的2#变电所处的断路器位置, 以及接收子站3传送断面ⅠⅠⅠ两回的3#变电所处的断路器位置, 以确定对侧的断路器状态。在整个系统中, 执行站为各变电站提供可靠的信号支持和操作依据。负责监控火力发电厂及相关风电设备的可切量信息的实施台1 和2, 将可切量信息上传并执行切机指令。收集执行站3的直流换流变数据后, 运用直流极控系统获取直流运行状态和故障信息, 并将其传输至子站1, 以接收来自子站1, 的调制闭锁直流指令, 并将其传输至直流极控系统, 以实现直流输电的运行控制[5]。
3.1 实验结果对比
以图6 中所示的电力网络结构为基础, 在全接线模式下, 以将断面工的N-2 故障作为例子来描述该系统的操作模式。详细的流程是这样的: 模拟3s 时, 区间ⅠⅠ发生线路一回AB 相接地金属性故障, 仿真的继电保护25ms 后, 检测到了故障发跳闸命令, 50ms 延迟跳开一回线路两侧的开关。当第4S 线二次侧出现ABC相接地故障后, 再次通过同一继电器的定时跳出区段ⅠⅠ次回路线[6]。直流输电经历了两次故障的穿越过程, 在此期间, 由于送端的交流系统出现了问题,导致了电压的下降, 从而会引发了直流极控的低位限流作用, 从而快速地将直流功率进行了下降, 在将其切断之后, 会伴随着交流电压, 重新进行传输。送端主站根据图2 所示的部分稳控策略, 进行切机和回降直流功率命令, 在断面 ⅠⅠ发生N-2波浪转移到断面 ⅠⅠⅠ后, 将断面 ⅠⅠⅠ总功率减去其双回线路热稳功率定值,则送端主站实施稳控策略, 向子站2 下达选择切新能源功率1096 MW。每个风力发电工厂在发生故障前的发电能力是750 MW, 根据超切逻辑, 实际切断1500 MW 机组; 同时, 也会进行回降直流功率的命令, 从N-2 故障之前断面 Ⅰ功率和N-2 故障之后后断面 Ⅰ发射功率差值进行分析, 随后, 送端主站向子站1下达回降直流功率1196 MW, 直流极控会进行回降,将其降低到6804 MW。至此, 一次电网的N-2 战略的确认就告一段落, 断面Ⅱ在N-2故障后直流线路、 断面Ⅰ、 断面Ⅱ、 断面川的电力的变化和切断的流程如图5所示。
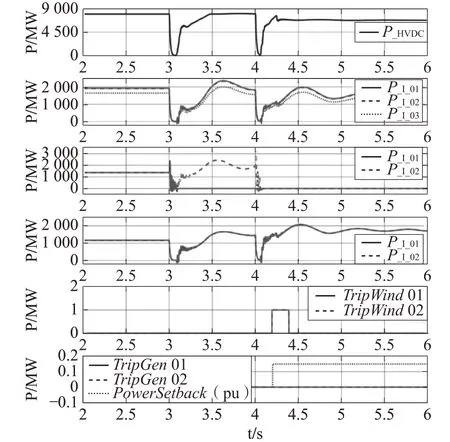
图5 交直流系统动态响应过程
4 结束语
针对目前安全稳定控制的开环试验方式不能对故障进行仿真, 且不能对故障进行实时仿真, 因此, 本文对安全稳定控制的标准化试验体系进行设计, 并对其进行标准化试验, 从而对稳定控制的试验体系中的信息交互、 标准化接口和平台的实施等进行了深入的探讨。结合具体项目, 构建RTDS 的在线模拟实验平台, 对提出的算法进行实验研究。该试验平台可推动稳定控制的规范化、 综合性试验, 提升试验的自动化水平, 试验工作的工作效率, 为试验的智能化试验方法, 具有广泛的推广价值。
猜你喜欢
电力系统自动化(2021年9期)2021-05-07
石油库与加油站(2020年2期)2020-11-23
石材(2020年7期)2020-08-24
科学与财富(2017年16期)2017-06-13
电子设计工程(2017年20期)2017-02-10
电子制作(2017年23期)2017-02-02
科学家(2016年4期)2016-07-25
电网与清洁能源(2015年5期)2015-12-29
四川电力技术(2015年5期)2015-12-19
电测与仪表(2014年18期)2014-04-04