船舶会遇过程碰撞风险演化随机Petri网模型
2023-12-29 13:28杜晓雨胡甚平李圣媛轩少永
上海海事大学学报 2023年4期
杜晓雨, 胡甚平, 李圣媛,2, 轩少永
(1.上海海事大学商船学院,上海 201306;2.广州港引航站,广东 广州 510100)
0 引 言
近年来,随着海上交通运输业的繁荣发展,船舶种类、数量和吨位增加,航道内船舶通航密度越来越大,航行环境更加复杂多变,导致海上船舶碰撞事故频发[1]。船舶碰撞事故不仅会导致严重的人员伤亡与经济损失,还可能造成严重的海洋环境污染,成为船舶航行安全的重大隐患之一[2]。因此,对船舶碰撞过程进行分析,预防和避免海上碰撞事故的发生已成为海上船舶航行风险研究的重点[3]。
目前国内外关于船舶航行风险评估的方法主要包括静态和动态风险评估方法,在风险测量方面主要使用定性分析、定量分析或定性与定量分析相结合的方法。应用较为广泛的定量和定性风险测量方法包括事件树分析法、故障树分析法、贝叶斯网络和Petri网建模分析法等。这些方法为分析导致事故发生的事件序列和事故因果关系提供了量化基础和图像说明,如:UGURLU等[4]通过构建船舶碰撞事故故障树,实现了对船舶碰撞静态风险的定量评估,并通过最小割集确定导致事故发生的主要因素;AFENYO等[5]通过搭建贝叶斯网络模型对船舶碰撞事故场景中潜在因素的相互依赖关系及其对事故的影响进行分析,实现了对事故场景中偶然因素之间相互依赖关系的建模。综上,大多数研究对船舶碰撞事故影响因素的选取主要基于事件序列和因果关系,却忽略了船舶碰撞风险演变的阶段性特征。

因此,本文着眼于船舶碰撞风险,提取船舶碰撞各个阶段的事故影响因素,并构建基于时间和空间的船舶碰撞事故演化的动态SPN模型,再现碰撞事故发展、形成过程,从多因素耦合和风险演化的角度对船舶碰撞过程中的动态风险进行量化分析。
1 船舶碰撞风险演化分析
1.1 船舶碰撞风险演化机理
船舶在航行过程中往往受到人、设备、环境、管理等多种因素的共同作用,这些因素没有固定的事件序列,但是随着事故进程的推进,各因素相互作用推动系统从无序状态变为有序状态或反向运动状态(该过程被称为风险演化过程)[10]。可能存在客观风险的船舶在自由航行中受到外界刺激后,船舶航行的稳定状态被打破,风险因子沿着一条或多条路径运动,推动着碰撞事故演化发展,最终导致船舶碰撞事故的发生。
船舶碰撞过程可以视为是一个受多因素作用的多步骤复杂系统,是一个基于时间和空间的动态行为特征转换的过程。将船舶碰撞过程分为5个阶段,分别为自由航行阶段、碰撞危险阶段、紧迫局面阶段、紧迫危险阶段和碰撞阶段,见图1。

图1 船舶碰撞过程阶段性分析
1.2 船舶碰撞风险演化过程分析
在船舶自由航行阶段能否发现来船对于后续采取避让方式以及执行避让行动有着十分重要的作用。在船舶碰撞危险阶段由于瞭望疏忽、船员能力素质差或者未使用安全航速,从而未能识别危险信息进而未采取合适的避让行动或采取的避让行动失败,将会直接导致船舶早、大(舵角)、宽、清避让行动失败,船舶逐渐进入紧迫局面阶段[11]。船舶会遇间距过小是船舶形成紧迫局面和发生碰撞的主要原因之一。
在紧迫局面阶段,船舶必须根据《国际海上避碰规则》有关规定采取避让行动,若未采取避让行动或采取避让行动过迟都会导致紧迫危险局面的形成。在紧迫危险阶段由于两船逐渐逼近,单船的行动已经不能够避免碰撞的发生,此时两船应该积极沟通协调避让的方法,使两船能够在安全距离上驶过。因此,两船可通过甚高频(very high frequency, VHF)无线电话进行协调沟通并采取相应的避让措施。在紧迫危险阶段采取避让行动的成功与否将直接影响到船舶在最后阶段的避让行动能否成功[12]。另外,船公司对船员的筛选与培训不足,导致船员能力素质较差以至于不足以应对紧急情况,或船公司对船舶没有进行定期的维修与保养,且船舶在航行过程中出现大的操纵问题,也会导致船舶碰撞事故的发生[13]。船舶碰撞事故是多因素耦合作用的结果。通过分析得出船舶碰撞过程中各个阶段的关键影响因素,搭建船舶碰撞风险演化过程综合模型,见图2。图2中,ARPA指自动雷达标绘仪。
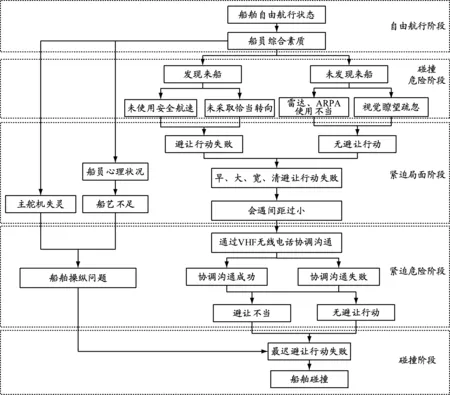
图2 船舶碰撞风险演化过程综合模型
2 模型构建
2.1 SPN以及马尔科夫链过程
Petri 网是描述具有分布、并发、异步特征的离散事件动态系统的有效工具,以研究模型的组织结构和动态行为为目标,着眼于系统中可能发生的各种状态变化及变化之间的关系,近年来被广泛应用于事故风险评估和可靠性分析[14]。Petri网的基本元素包括库所、变迁、有向弧和令牌(Token)。由于系统中事件的发生(即变迁的实现)需要一定的时间,所以通常会在Petri网中引入时间约束以实现其功能的拓展。通过在每个变迁的可实施与实施之间关联一个随机的延迟时间得到的Petri网被称为SPN[15]。
SPN通常用一个六元组(P,T,F,W,M,λ)表示,其中:P={P0,P1,…,Pm}表示库所的有限集,即系统各阶段运行时所处的局部状态(本文指船舶碰撞各阶段的关键影响要素及状态)[16];T={T0,T1,…,Tn}表示变迁的有限集,即推动系统演化的因素;F为连接库所与变迁的有向弧集合,表示系统运行过程中的状态流方向;W表示弧权函数;M={M0,M1,…,Mq}表示SPN的标识,其中M0为SPN的初始标识(即系统的初始状态),系统状态随时间的演化是一个随机的过程,用Token标识;λ={λ0,λ1,…,λn}表示系统状态变迁的平均实施速率集合,在模型中每一个变迁Tk都会有一个λk与之相对应。当SPN模型开始运行时,随着变迁不断被激发,Token(用小黑点表示)会在与变迁相连的库所流动,每经过一个库所就会产生一个新的状态标识,直到达到系统的最终状态。
2.2 船舶碰撞风险演化模型
船舶碰撞事故可视为时间和空间上一系列关系复杂的离散事件相互作用的结果,而SPN可以通过关联矩阵、状态方程等描述动态系统的演化过程,模拟系统中离散事件之间的相互作用以及系统的演化过程。采用SPN建模方法可以完成对船舶碰撞事故发生过程中各节点风险值的量化,完成对碰撞风险演化过程的评估和分析。根据所得到的船舶碰撞事故致因图,搭建船舶碰撞过程的SPN模型,见图3。图3中库所和变迁的具体含义分别见表1和2。

表1 库所含义
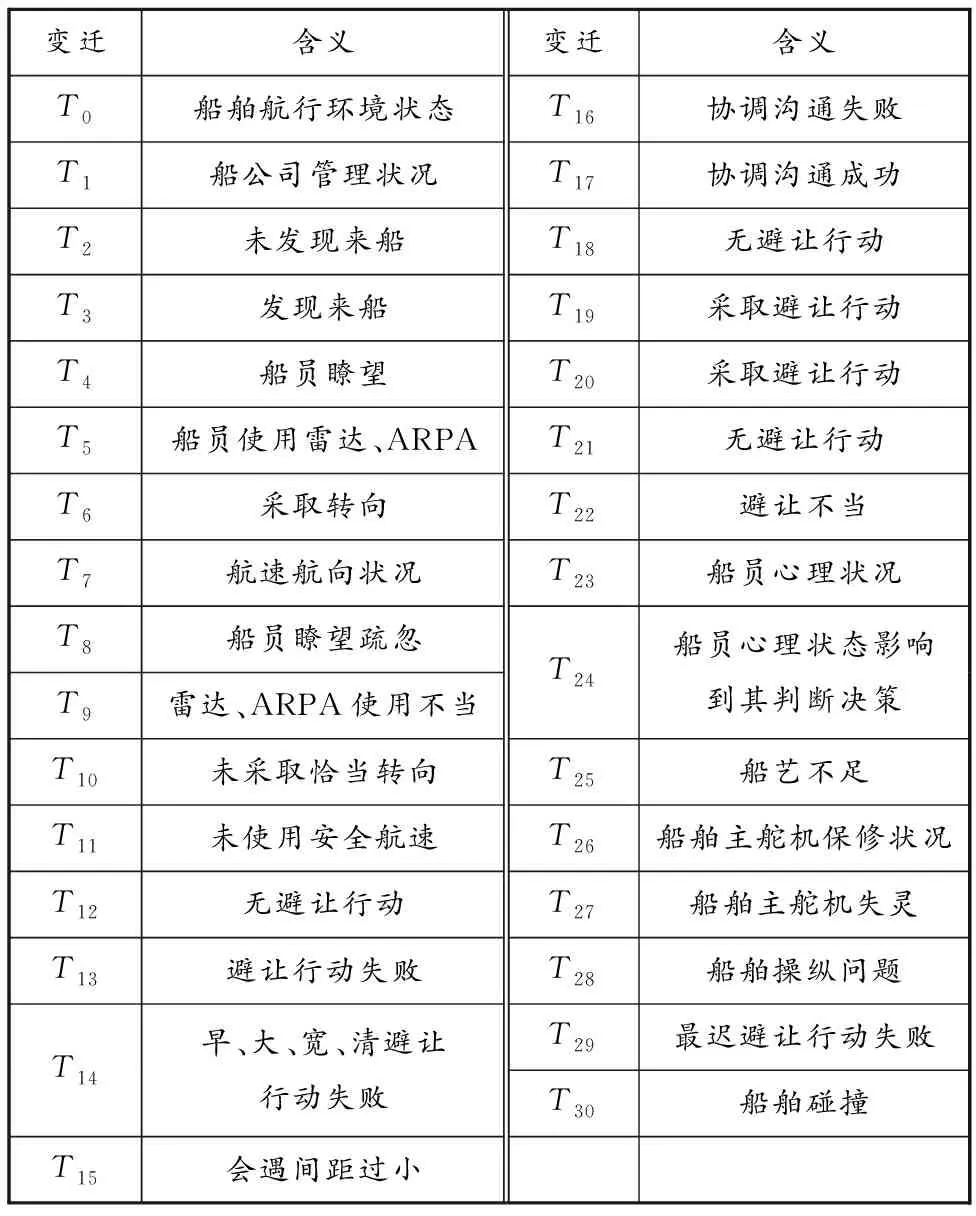
表2 变迁含义
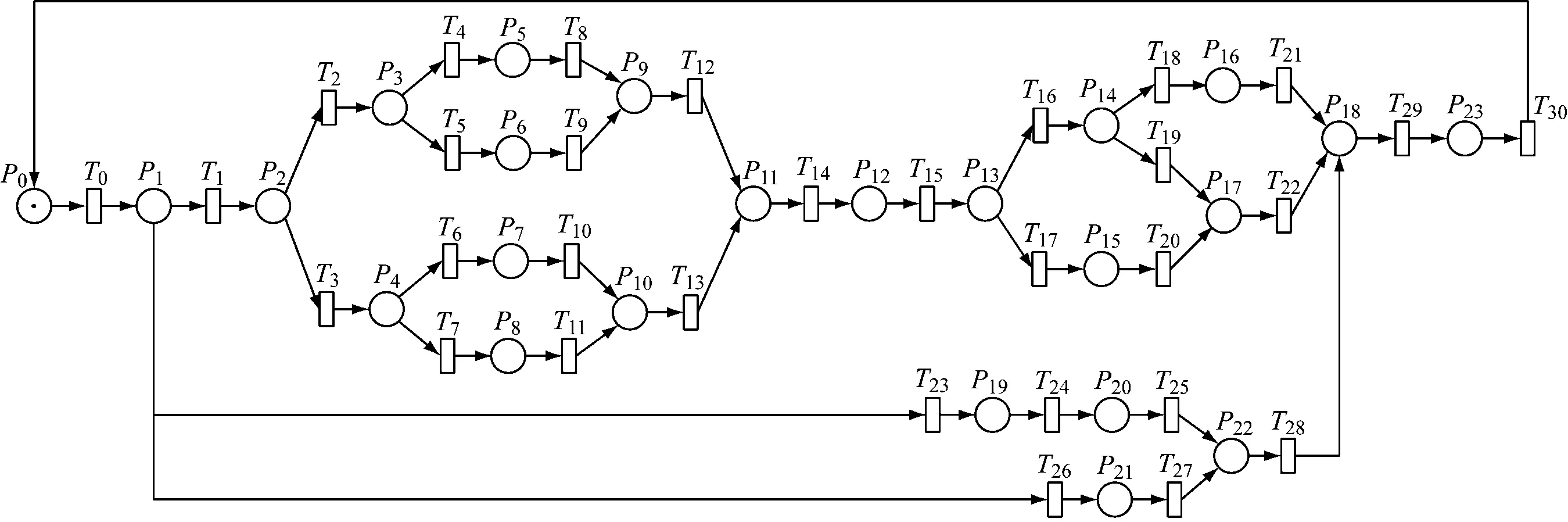
图3 船舶碰撞过程的SPN模型
在连续时间SPN中,变迁从可实施到实施需要一定的延迟时间,这个延迟时间被认为是一个服从指数分布的连续随机变量[17]。当变迁的激发时间呈指数分布且标记可数时,模型可以与一个连续时间马尔科夫链同构,SPN的每一个状态标识都可以映射到一个马尔科夫链的状态,即SPN的可达图同构于马尔科夫链的状态空间。因此,若以有向弧表示不同标识或状态的动态转换,则可得到与上述SPN模型等价同构的马尔科夫链,见图4。基于马尔科夫链稳态分布的相关定理对系统状态的演化过程进行分析[15],根据马尔科夫过程可得到系统稳态概率表达式:
(1)
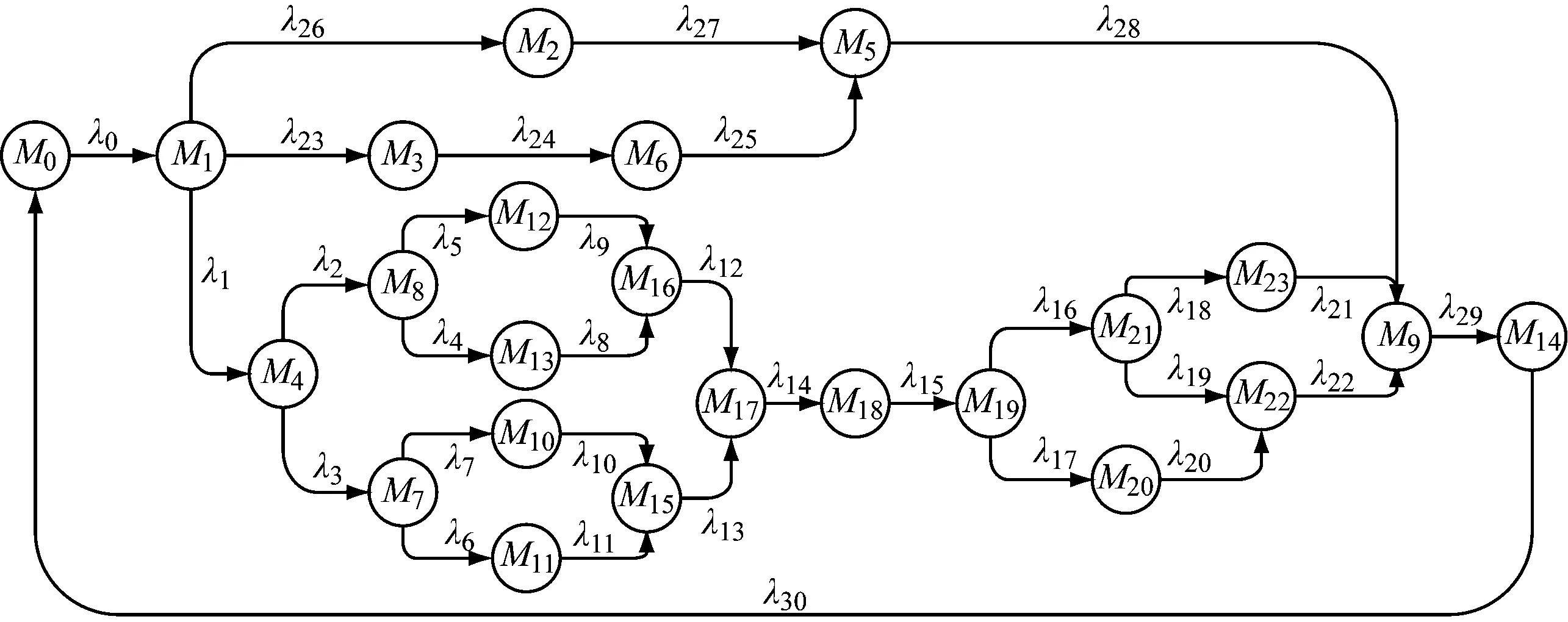
图4 与SPN模型同构的马尔科夫链
式中:p为某时刻系统的稳态概率,用行向量p=(p0,p1,…,pm)表示。x=(aij)为系统的概率转移矩阵:若i=j,则aij表示从状态Mi出发的所有弧上标记的变迁速率λi之和的负数;若i≠j,则aij表示从状态Mi到Mj对应的变迁速率λi,若Mi与Mj之间没有连接弧则aij=0。p(Mj)为SPN模型下Mj的概率。
2.3 仿真流程
船舶碰撞风险演化分析是通过搭建SPN模型,模拟船舶在碰撞事故发生前的动态风险变化,对各影响因素随时间和空间的变化规律以及对最终的碰撞结果的影响进行仿真分析,主要包括事故场景分析、影响因素提取、模型搭建、船舶碰撞风险仿真以及风险量化分析等。在对风险进行量化分析时,将船舶碰撞风险视为两船航行风险的叠加。在对船舶碰撞风险进行仿真分析后,需对所获得的数据进行验证,若所获得的风险分析数据符合当下事故发生的情景且取值在合理范围内,则可以进行下一步的船舶碰撞风险演化过程分析。具体仿真流程见图5。
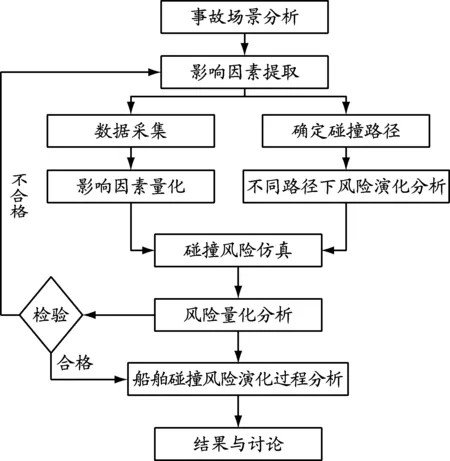
图5 船舶碰撞风险演化仿真流程
3 算例分析与讨论
以2021年4月发生在青岛朝连岛附近海域的一起杂货船与油船碰撞事故为例,对事故发生前20 min的碰撞风险演化过程进行仿真分析。事故发生在青岛朝连岛东南约11 n mile处。该杂货船从海南洋浦港锚地开航,驶往青岛港,在行驶到内锚地时与锚泊的油船相撞。
3.1 事故原因分析与数据收集
本文着重于船舶碰撞风险演化过程分析,由于油船处于锚泊状态,所以仅对杂货船的航行风险进行演化分析。通过问卷调查及召开船舶碰撞事故原因分析会,邀请引航员、船长、海事官员和教授共11名,对船舶碰撞影响因素对碰撞事故的影响程度进行分析和评估,并将评估结果无因次化为各状态变迁对应的变迁速率值。
通过分析杂货船碰撞过程,发现船舶碰撞过程分为5个阶段,其事故致因路径共有4条。路径Ⅰ/Ⅱ为P0→P2→P3→P5/P6→P9→P11→P13→P14→P17→P18→P23,即船员综合素质较差,在船舶航行中存在船员瞭望疏忽或雷达等使用不当的情况,导致船舶未采取避让行动从而陷入紧迫危险阶段,且在两船间距较小的情况下,两船间基于VHF无线电话的协调沟通失败,使得两船最迟避让行动采取不当,最终导致碰撞事故的发生。路径Ⅲ为P0→P2→P4→P8→P10→P11→P13→P14→P17→P18→P23,即船员综合素质较差,在船舶航行中并未使用安全航速,导致船舶未及时采取避让行动,错过最佳的避让时机,使得船舶会遇间距变小,且两船在紧迫危险阶段最迟避让行动采取不当,最终导致碰撞事故的发生。路径IV为P0→P1→P19→P20→P22→P18→P23,即船公司管理疏忽,船长、船员招募及岗前培训存在潜在的安全隐患,以及船员自身能力素质的不足,导致出现船舶操纵问题,促进风险演化进程的发展,最终导致船舶碰撞事故的发生。
各影响因素的发生时间为随机变量且服从指数分布,且假设变迁T0,T1,…,T29的平均实施速率为λ0,λ1,…,λ29。根据事故调查报告中描述的环境特点以及船公司管理状况对船舶各状态进行客观评价打分,根据事故调查报告以及专家评估打分对其余变量进行定量统计分析,得到各节点的变迁速率值,见表3。
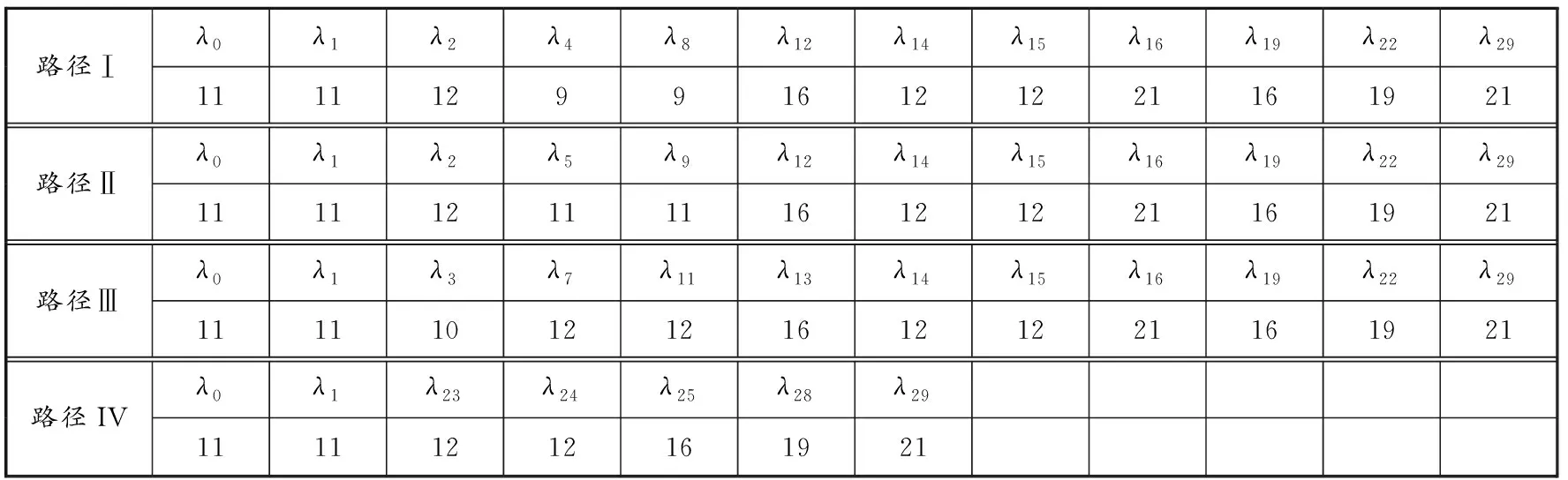
表3 不同路径下各节点变迁速率值
在获取相应数据和碰撞路径后,基于Petri网理论和马尔科夫链平稳分布的相关定理对船舶碰撞风险演化过程进行动态仿真分析,完成对事故演化过程中各节点稳态概率的求解。仿真过程表示的是从初始状态M0出发经过一系列变迁后库所中的Token会依据弧的方向转移到下一个库所,直到达到最终库所,即得到不同触发变迁可达标识集。系统输入输出函数表达式如下:
λ30p(M0)=λ0p(M1)
λ0p(M1)=λ26p(M2)+λ23p(M3)+λ1p(M4)
λ26p(M2)=λ27p(M5)
λ26p(M3)=λ24p(M6)
λ1p(M4)=λ2p(M8)+λ3p(M7)
(λ27+λ25)p(M5)=λ28p(M9)
λ24p(M6)=λ25p(M5)
λ3p(M7)=λ7p(M10)+λ6p(M11)
λ2p(M8)=λ5p(M12)+λ4p(M13)
(λ21+λ28+λ22)p(M9)=λ29P(M14)
λ7p(M10)=λ10p(M15)
λ6p(M11)=λ11p(M15)
λ5p(M12)=λ9p(M26)
λ4p(M13)=λ8p(M16)
λ29p(M14)=λ30p(M0)
(λ10+λ11)p(M15)=λ13p(M17)
(λ9+λ8)p(M16)=λ12p(M17)
(λ12+λ13)p(M17)=λ14p(M18)
λ14p(M18)=λ15p(M19)
λ15p(M19)=λ16p(M21)+λ17p(M20)
λ17p(M20)=λ20p(M22)
λ16p(M21)=λ18p(M23)+λ19p(M22)
(λ19+λ20)p(M22)=λ22p(M9)
λ18p(M23)=λ21p(M9)
3.2 模型仿真与验证
为对事故演化过程进行动态分析,将碰撞过程中的影响因素视为碰撞风险演化的节点,通过改变节点变迁速率值对船舶在航行过程中基于时空的事故风险演化过程进行仿真分析。变迁速率λ0、λ1对应的节点分别为船舶航行环境状态和船公司管理状况,对这2个节点的评估属于客观评估,因此在整个事故演化过程中λ0、λ1被视为常数。设事故致因路径上的各节点变迁速率初始值为1,为保证其余非路径节点不会对路径节点的稳态概率产生影响,将其余节点的变迁速率设为10 000。保持路径上各节点变迁速率随着时间和空间的变化呈线性增加的趋势,最终达到如表3所示的各节点变迁速率的终态值,用于对事故风险演化过程进行仿真。
基于系统输入输出函数表达式对事故发生前20 min的碰撞风险演化过程进行分析,针对不同的碰撞路径通过改变单条致因路径上不同节点的变迁速率值模拟船舶碰撞风险随时间和空间的变化,探索其变化规律。通过将所有事故致因路径的变迁速率值进行叠加仿真,对碰撞事故综合风险的演化过程进行基于时间和空间的量化分析。由于在该案例中一艘船处于锚泊状态,所以通过对单船综合致因路径下的船舶碰撞风险进行仿真分析发现,随着事故演化进程的推进船舶碰撞概率从最初的0.323 03提高到0.838 85,并随着两船间距的缩短,船舶碰撞稳态概率平稳上升,碰撞风险累积效应明显。这表明此案例中的碰撞风险演化过程可被视为单船的事故风险演化过程。
对事故发生前20 min不同致因路径下的船舶碰撞风险演化过程进行分析,见图7(a) 。随着时空的推移,各致因路径的碰撞稳态概率先快速增大,后趋于稳定。船舶碰撞影响因素的相互作用表现为事故致因路径的叠加作用。随着演化进程的推进,碰撞稳态概率显著增大后保持在较高水平,即船舶在自由航行阶段和碰撞危险阶段,碰撞稳态概率增长速度较快,在这两个阶段船员过失行动对碰撞风险的提高有显著影响。如图7(b)所示,致因路径叠加导致碰撞风险增加,其中致因路径Ⅰ、Ⅱ和Ⅲ的叠加效果尤其显著,这表明船舶在碰撞危险阶段同时存在船员瞭望疏忽、雷达等使用不当及未使用安全航速等问题,导致船舶碰撞风险显著提高。

(a)各致因路径下
对船舶碰撞综合致因路径进行仿真,可以得到各节点稳态概率的变化。从结果可以看出,随着演化过程的推进各节点稳态概率总体呈下降趋势,船舶碰撞概率随着演化进程的推进稳步提高,见图8。在整个演化过程中节点P18、P22、P12、P11、P17的稳态概率下降最为显著,表明船舶早、大、宽、清避让行动失败导致两船间距过小以及在紧迫局面避让行动失败对船舶碰撞事故的发生影响最为显著。
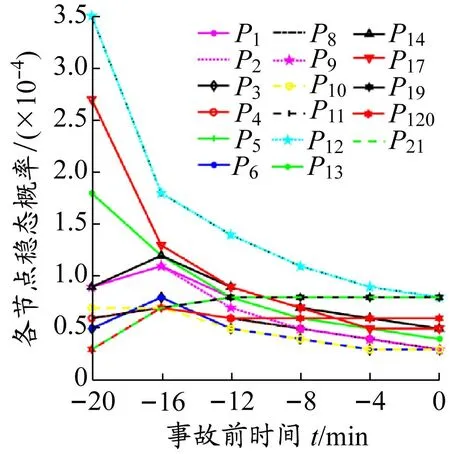
(a)小概率节点
3.3 结果与讨论
对船舶碰撞事故场景进行事故影响因素提取发现:
(1)由在4条致因路径、综合致因路径以及多致因路径共同作用下船舶处于演化最终状态的碰撞稳态概率(见图9)可知:船舶碰撞事故的发生是多因素、多致因路径共同作用的结果,存在一定的路径依赖性。
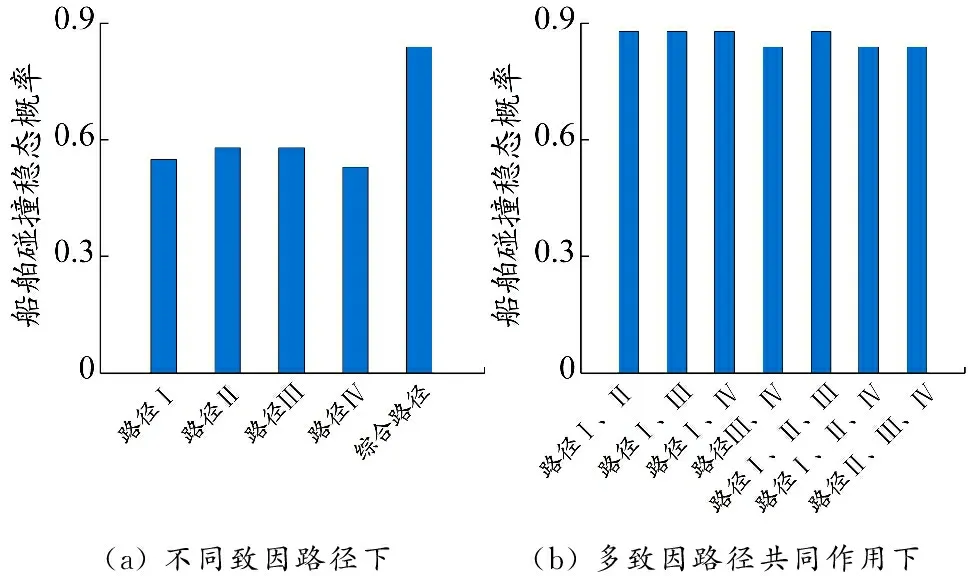
图9 不同致因路径下船舶处于演化最终状态的碰撞稳态概率
(2)致因路径Ⅰ为在船舶自由航行阶段船员综合素质差导致瞭望失误而未发现来船进而未采取避让措施,两船间距逐渐缩短,导致船舶早、大、宽、清避让行动失败,船舶进入紧迫局面阶段。在紧迫局面阶段由于协调沟通失败,所以未采取避让措施,船舶最迟避让行动失败,最终导致船舶碰撞事故的发生。
(3)致因路径Ⅱ是在船舶碰撞危险阶段雷达等使用不当导致未能发现来船,之后在紧迫局面阶段与他船协调沟通失败,最终导致碰撞事故的发生。如图9(b)所示,致因路径Ⅱ与致因路径Ⅰ对船舶碰撞风险的影响效果相似,致因路径Ⅱ与致因路径Ⅰ叠加作用后船舶碰撞概率从原来的0.5增大到0.8左右,叠加后碰撞风险显著提高。
(4)致因路径Ⅲ为船舶在航行过程中未使用安全航速而导致船舶避让措施不当,在紧迫局面阶段未与他船协调避让成功,最终导致船舶碰撞事故的发生。与致因路径Ⅰ与致因路径Ⅱ对碰撞风险的影响效果相似,且当致因路径Ⅰ、Ⅱ、Ⅲ共同作用时即船舶在航行过程中船员瞭望疏忽、雷达等使用不当、未使用安全航速、协调沟通失败、避让不当等这些因素共同作用时,船舶碰撞稳态概率显著增大。
(5)致因路径IV为船公司内部管理出现问题导致船员在心理素质、船艺上表现不足,从而出现船舶操纵问题,直接导致船舶碰撞事故的发生。从仿真结果可以看出,虽然致因路径IV单独作用时船舶碰撞风险相对较低,但是与其他路径进行叠加作用时碰撞风险提高显著。这表明船公司管理不当、船员心理素质较差等是船舶航行过程中的巨大风险隐患,这些因素与其他影响因素相互作用对船舶航行安全产生巨大威胁。
(6)通过对比不同事故致因路径下的船舶碰撞稳态概率发现,船舶碰撞事故的发生是多因素相互作用的结果,这些致因路径通过耦合共同作用于事故发生的整个过程,风险因素相互作用及事故致因路径的叠加作用导致船舶碰撞稳态概率显著增大。通过对碰撞事故发生时刻各致因路径的风险进行量化分析,可得到船舶碰撞事故致因路径不同节点的稳态概率分布,见图10。基于事故案例的碰撞风险量化分析发现,船舶在能见度不良水域航行时船员瞭望疏忽、雷达等使用不当、未使用安全航速、未及时采取有效的避让行动以及船公司管理不当等可能是造成船舶碰撞的主要原因。
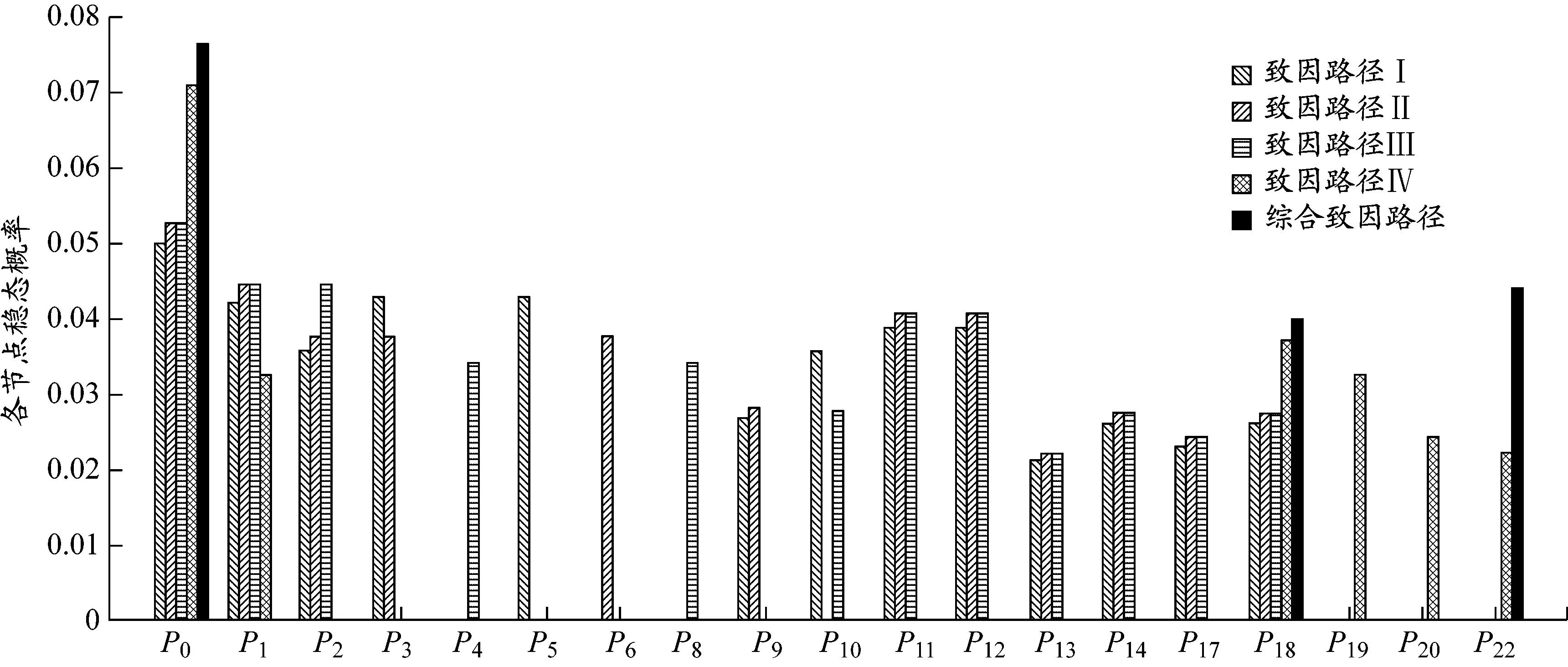
图10 事故发生时刻不同致因路径下各节点的稳态概率分布
4 结 论
基于Petri网理论,提出一种利用随机Petri网(SPN)模型对海上船舶碰撞风险演化过程进行建模分析的方法,通过搭建船舶碰撞风险演化模型并同构其同型的马尔科夫链,实现对风险演化过程的量化分析,完成对船舶碰撞事故中基于时间和空间的风险演化过程分析。研究表明该模型在分析船舶碰撞事故中基于多因素耦合的碰撞风险演化过程以及演化风险量化方面具有一定优势。通过对演化模型进行分析发现,船舶在碰撞危险阶段船员瞭望是否疏忽、雷达等使用是否正确以及船舶是否保持安全航速航行,在紧迫局面阶段船舶能否与他船成功协调沟通、是否存在操纵失误等对船舶碰撞概率的影响显著。
基于事故场景对事故发生前20 min的风险演化过程进行分析,找出风险演化规律。基于事故案例分析发现,船舶碰撞事故是多条事故致因路径叠加的结果,事故影响因素相互作用构成事故致因路径,存在路径依赖性。同时,事故致因路径耦合会导致船舶碰撞事故发生概率增大,事故风险值增大,并在一定的时间和空间上呈现出一定的规律性。
猜你喜欢
娃娃乐园·综合智能(2023年6期)2023-06-14
韩国语教学与研究(2021年2期)2021-11-24
数学物理学报(2021年4期)2021-08-30
疯狂英语·新读写(2021年6期)2021-08-05
四川地质学报(2020年2期)2020-05-31
中国粮食经济(2018年12期)2018-12-30
中国粮食经济(2018年10期)2018-12-30
中国粮食经济(2018年11期)2018-12-27
人大建设(2017年6期)2017-09-26
中学生英语(2017年6期)2017-07-31