新能源汽车锂电池健康监控系统
2023-12-28 02:51:34胡小惠李丽敏杨雪崟孙思伟刘楷琛
微处理机 2023年6期
胡小惠,李丽敏,王 海,杨雪崟,孙思伟,刘楷琛
(西安工程大学电子信息学院,西安 710600)
1 引 言
随着全球环境污染和气候变化问题的日益严峻,人们对清洁能源的需求与日俱增。作为电动汽车的主要能源,锂离子电池拥有能量密度高、寿命长和污染低等优点,但其性能衰减及潜在安全风险需要得到关注[1]。针对锂电池的寿命问题进行预测研究有重要意义。在此对传统无迹粒子滤波算法进行改进,提出改进的无迹粒子滤波算法(IUPF)对锂电池剩余使用寿命进行预测。IUPF 结合UPF 和传统粒子滤波算法的优点,改进了数据驱动方法鲁棒性不强方面的缺点。同时,采用NASA 数据库中的Lithium-ion 电池数据进行测试,建立符合锂电池容量退化的双指数模型,通过IUPF 算法对其进行参数估计,并得到容量预测曲线。最后利用三种评价指标综合评价预测结果,即可实现对锂电池剩余使用寿命的估计。
2 理论基础
2.1 研究现状
目前,国内外对于单体锂电池寿命预测的方法大致分为三大类:基于机理模型、基于数据驱动模型和基于二者融合的模型。杨晓光等人[2]和Kupper 等人[3]分别基于电化学老化模型、多物理模型,研究了锂离子电池的寿命预测方法。然而,这些预测模型中存在模型误差的影响,会导致寿命预测误差逐渐增加。基于数据驱动的方法,刘凯龙等人[4]提出了考虑锂电池老化和工作温度及放电深度的模型结构,并建立了数据驱动模型来实现锂电池的有效容量预测。徐佳宁等人[5]提出了一种新的支持向量回归方法,通过蚁狮算法优化模型参数并采用Levy 飞行算法改进搜索能力,对锂电池剩余寿命进行预测。刘月峰等人[6]采用贝叶斯模型平均法和长短期记忆神经网络相结合的方法,构造多个模型得到不同的预测结果。但是,此类方法存在数据采集和预处理难度较大等问题。而基于融合模型的方法能够克服单一方法存在的局限性,高效利用数据信息,提高预测准确性,比如许晓东等人[7]提出了一种通过结合维纳过程与贝叶斯方法预测电池剩余寿命的方法,建立了一个局部波动拟合模型,以区分正常退化趋势和局部波动部分。该方法可以更精确地预测电池剩余寿命,并实时在线更新。
2.2 无迹粒子滤波
无迹粒子滤波(UPF)是一种基于粒子滤波算法的状态估计方法,它利用无迹卡尔曼滤波(UKF)中引入的无迹变换来解决非线性系统下粒子滤波的采样误差问题。与传统粒子滤波相比,UPF 通过将非线性函数的中心点转化为一组Sigma 点,并通过这些Sigma 点近似地计算最终状态分布的均值和协方差,避免了粒子滤波中因粒子数目不足而带来的偏差和抖动问题。同时,UPF 还可以在非线性系统中通过动态调整方差矩阵的大小,对不同程度的非线性进行自适应处理。
UPF 算法具有计算复杂度低、容易实现等优点,然而,由于UPF 需要进行Sigma 点的计算,对于高维状态空间或高维观测值空间的系统,UPF 的计算量将成为一个挑战,需要相应的优化处理。
2.3 改进的无迹粒子滤波算法
IUPF 是一种用于非线性和非高斯状态估计问题的粒子滤波算法。算法结合了无迹变换和标杆粒子滤波两种方法,具有较高的稳定性和准确度。
首先,在构建模型时,IUPF 利用UPF 提供的Sigma 点方法,对非线性系统建立起更加准确的状态转移模型,解决了UPF 算法计算过程中对协方差矩阵开根号时可能得到的结果为无效值的问题。另外也通过自适应参数调整策略,自动获取最优的采样数量和Sigma 点数量等值。其次,在更新粒子群体状态时,IUPF 利用标杆粒子选取特征量进行权重分配,有效缩小了估计误差,同时还能处理多峰、非高斯和非线性情况下的目标状态估计问题。最后,在求解目标概率分布的均值和协方差矩阵时,IUPF 算法具有高精度和实时性,可在需要估计的状态空间中寻找到一个最优解。相比传统的UPF 算法,IUPF 算法具有更高的精度和更快的收敛速度。
3 锂电池容量退化模型及RUL 预测
3.1 数据来源
电池数据来自于NASA 所提供的Battery Data Set 数据集,该组测试用的锂电池是型号为18650的钴酸锂离子电池[8]。此数据集是以MATLAB 数据存储的标准格式*.mat 文件提供。此处采用第一个数据集,其中包含四组电池:B0005、B0006、B0007和B0018。
实验温度选为24℃。测试工况包括:充电、放电、EIS 阻抗测量。以1.5A 的恒定电流将电池充电至电压为4.2V,接着以恒定电压继续充电到充电电流降至20mA。再以2A 的恒定电流放电直到电压分别下降1.5V、1.7V、2V 和1.7V。最后,调制0.1Hz到5kHz 的频率进行电化学阻抗测试。如图1 所示是锂电池放电时的电池容量衰减曲线。按照实验规定,当锂电池当前时刻下充满电时的容量值达到额定容量的70%左右(从2Ah 下降到1.4Ah)时,即认为锂电池报废,寿命结束。
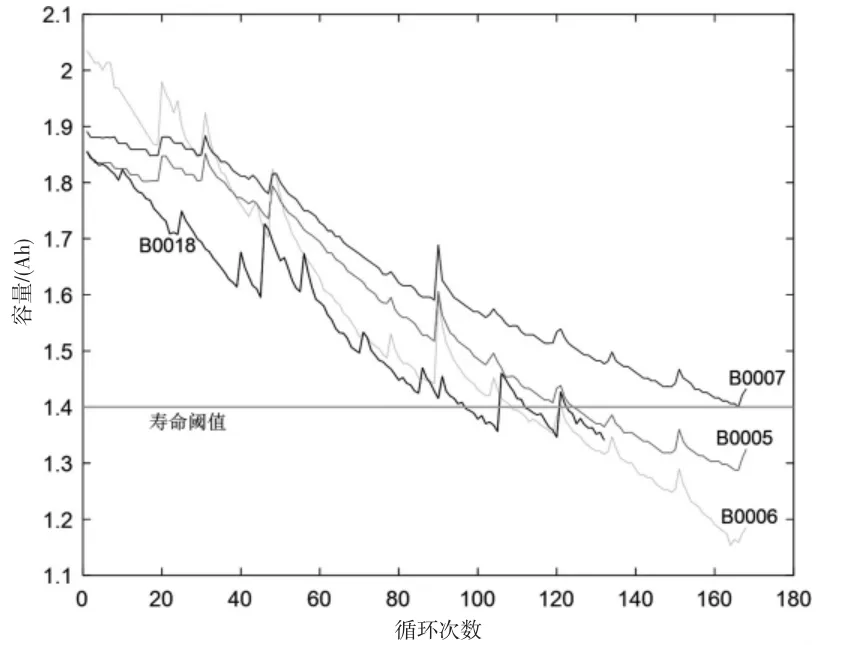
图1 锂电池容量退化曲线
3.2 锂电池容量退化模型
为建立锂电池老化的动态过程,选用双指数经验模型[9]来拟合电池容量衰退曲线,公式如下:
式中,Qk表示k 时刻的锂电池容量;k 为循环充放电次数;a 和c 是与锂电池内阻相关的参数;b 和d 则为与锂电池退化速率相关的参数。如果a、c、b、d 四个参数能被准确估计,那么对于锂电池容量的模拟和预测也将更加准确,即能够基本确定锂电池的状态方程和观测方程[10],如下式:
式(2)为状态方程,式(3)为观测方程,式中w 表示过程噪声,σ 表示标准分布的白噪声。
3.3 锂电池剩余使用寿命预测
基于上述模型的对剩余使用寿命(RUL)的预测过程如下:
首先将模型的参数初始值代入式(1),然后在先验概率密度中采样,由重要性赋权值。由新权值与原样本近似系统状态估计后验概率密度。第i 个样本在第k 次循环下预测第k+l 次循环放电容量值,公式如下:
根据NASA 电池数据的容量阈值为额定容量的70%,在k 时刻下,锂电池剩余使用寿命为L 个循环,则其预测过程如下:
因此,在第k 次循环下,RUL 的预测结果为:
4 实验验证与结果评价
4.1 基于IUPF 的锂电池容量预测
初始参数经过算法训练后,运行程序得到容量退化预测曲线图。本实验取B0005 号电池为样本。图2 所示是基于UPF 和IUPF 算法的锂电池容量预测曲线,以68 次和78 次前的数据作为训练集,以其后100 次和90 次的数据作为测试数据,并预测其容量值。如图2 所示为基于UPF 和IUPF 算法的锂电池容量预测曲线对比。以68 次和78 次前的数据作为训练集,以其后100 次和90 次的数据作为测试数据,并预测其容量值。可以看出两种算法在进行容量退化预测时,训练部分和预测部分的曲线都有所不同。
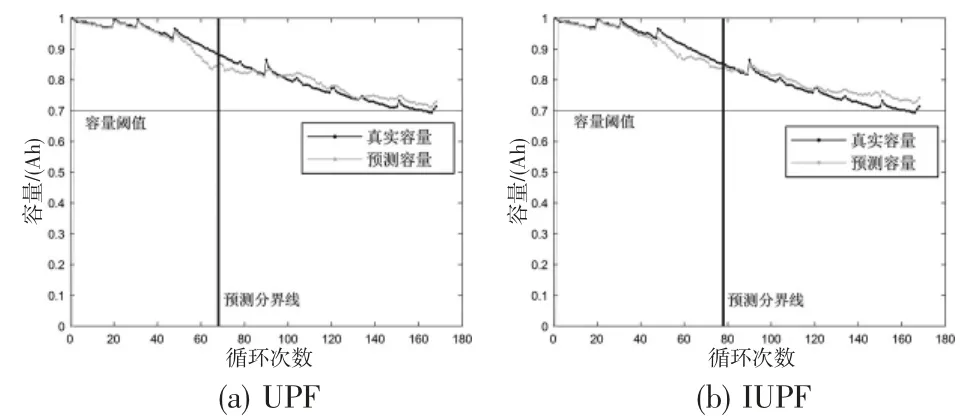
图2 B0005 锂电池容量退化预测
如图3 所示为取第100 至120 次循环下的预测曲线的对比结果。能够清晰看出IUPF 算法预测结果比UPF 算法更靠近真实容量退化曲线。这表明在锂电池容量退化预测上IUPF 算法优于UPF,为准确预测锂电池剩余寿命提供了更好的基础。

图3 100 至120 次循环下容量退化预测
4.2 基于IUPF 的锂电池RUL 预测
如图4 所示为基于两类算法的锂电池RUL 预测。从图中可以看出基于IUPF 算法的RUL 预测曲线和UPF 算法相比,前者的预测结果整体上更靠近实际的RUL 曲线,并且振荡更小,这说明预测的结果更具稳定性和可靠性。

图4 B0005 锂电池RUL 预测
4.3 指标评价
为了对预测模型进行定量评价,选取三种评价指标来对预测结果进行分析。
1)估计误差
估计误差是指数据处理过程中对误差的估计,有多种统计表示方式。在统计学中,估计误差是此估计量的期望值与估计参数的真值之差。
2)平均绝对误差MAE
MAE 表示预测值和观测值之间绝对误差的平均值,其表达式如下:
3)均方根误差RMSE
RMSE 表示预测值和观测值之间差异(称为残差)的样本标准差,其表达式如下:
式(7)和式(8)中,m 均表示样本量,h(xi)和yi分别表示第i 个变量的实际值和预测量。仍选取B0005号电池为样本,以这三项指标对两种算法的性能作综合评价,结果如表1 所示。

表1 B0005 锂电池性能综合评价
RMSE 和MAE 越接近于零,其拟合效果越好,误差也越小。从表1 中可以看出,IUPF 算法预测后的指标均优于UPF 算法。这表明基于IUPF 的锂电池容量预测方法总体性能优于UPF 方法。
5 结束语
针对锂电池健康管理,提出了改进的无迹粒子滤波算法IUPF。建立锂电池容量退化双指数模型,结合IUPF 算法预测出锂电池容量退化曲线及剩余使用寿命,对比NASA 锂电池数据集验证了算法的有效性。利用估计误差、MAE 和RMSE 三类评价指标综合分析了IUPF 算法与UPF 算法的性能。预测结果和评价指标均表明,IUPF 算法在用于锂电池健康监控管理时其性能优于UPF 算法。
猜你喜欢
成都信息工程大学学报(2017年4期)2018-01-22 02:08:20
电测与仪表(2017年20期)2017-12-19 05:14:28
光学精密工程(2016年4期)2016-11-07 09:05:35
电源技术(2016年2期)2016-02-27 09:04:52
电源技术(2015年7期)2015-08-22 08:48:22
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电子设计工程(2014年20期)2014-02-27 12:01:00
电源技术(2014年9期)2014-02-27 09:03:22
储能科学与技术(2014年5期)2014-02-27 07:16:12