高压线路检修中无人机协作通信多链路调度方法
2023-12-28 06:51:40曾仁森
通信电源技术 2023年20期
曾仁森,刘 远
(中国南方电网有限责任公司超高压输电公司柳州局,广西 柳州 545000)
0 引 言
高压线路的检修是电力行业中一项非常重要且具有挑战性的任务。利用传统的人工巡检方式检查和维护高压线路的安全运行时,存在许多困难和风险,需要大量的人力资源且耗时较长。因此,寻求更高效、安全及智能化的解决方案是现代电力行业的一个关键目标[1]。无人机技术的不断发展为高压线路检修带来了新的机遇。无人机具有灵活性高、可高空拍摄、远距离通信等优势,逐渐成为线路巡检的理想工具。由于单个无人机的能力和数据传输速率相对有限,无法满足复杂的高压线路检修需求,协作通信和多链路调度成为提高无人机应用效能的关键技术[2]。协作通信是多个无人机之间通过无线通信进行信息交换和任务协作的过程。在高压线路检修中,协作通信可以实现多个无人机之间的合作,共同完成线路检查和维护任务。多链路调度通过同时使用多个通信链路将无人机和地面控制站连接起来,可以提高数据传输速度和可靠性,提高整体的健壮性和效率。
1 无人机协作通信多链路调度方法
1.1 信道链路的路径损耗计算
在无人机协作检修高压线路的过程中,通信链路的调度至关重要。高压输电线路中存在一种典型的时频衰减现象,因此无线电波在户外传输过程中以反射和衍射为主[3]。在户外环境下,由电磁散射引起的多途传输效应会使无线信号在接收端的接收功率、相位发生改变,即衰落。物理层信道中的衰落特性将严重影响无人机协作通信的整体性能和传输质量[4]。无人机协作通信信道模型的衰落特性分类如图1 所示。
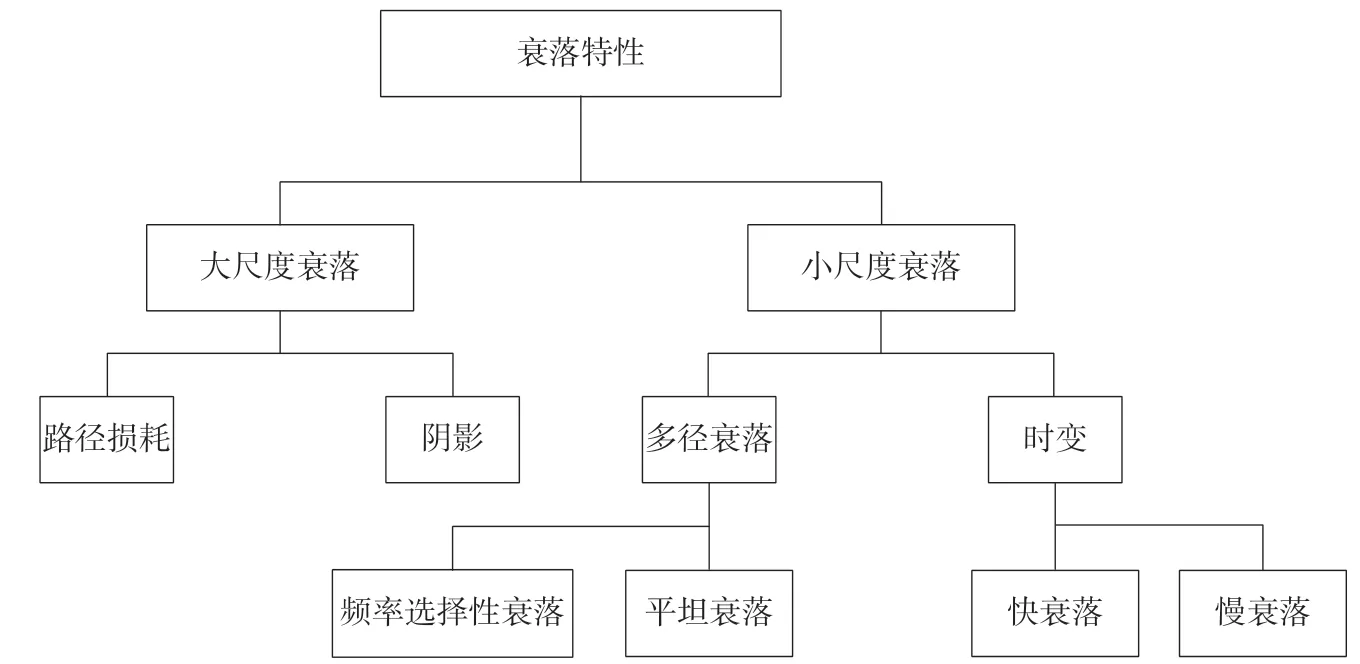
图1 衰落特性分类
针对信道链路的衰落特性进行研究,计算该信道模型上瞬时信噪比的概率密度函数,即
式中:m1表示衰落因子;α表示衰落的平均信噪比数值;λ表示衰落信号的发射功率;χ表示接收端所得到的接收信号;κ表示传输的衰落信号;OK表示高斯白噪声。
该信道链路的路径损耗为
式中:gt表示发射天线的增益;gr表示接收天线的增益;d表示发射天线与接收天线之间的距离;表示波长。
1.2 选择无人机检修高压线路最优路径
无人机协作节点共享一个传输信道,因此他们在发送数据前必须与其他节点竞争,以获得信道的使用权,从而实现通信。如果某个空闲节点不在全向通信网络中,将无法接收全向控制帧,也无法了解其传输情况[5]。由于有向传输方式的天线增益高于全向方式,且传输距离更远,空闲节点很可能处于一对多个节点的有向通信距离之内。在向无人机接收端传输信号时,该空闲节点可能会对通信产生干扰。无人机与高压线路之间的距离如图2 所示。
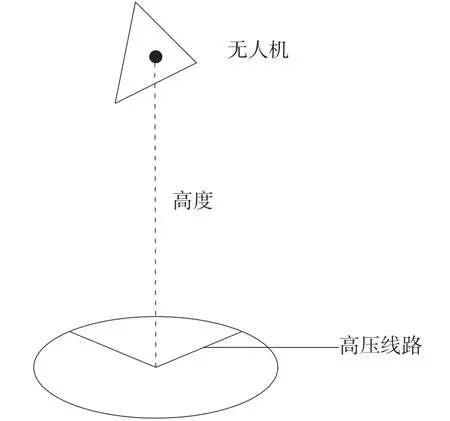
图2 无人机与高压线路的距离
从通信多链路的角度出发,选取一个路径损耗最小的无人机作为节点,然后选择无人机检修高压线路的最优路径[6]。无人机路径损耗计算公式为
式中:h表示无人机的飞行高度;v、u表示常数,其大小完全取决于环境因素;ri表示无人机距离使用者的水平高度[7]。如果新检修高压线路最优路径清单中的节点与该检修高压线路最优路径清单中最后一个节点之间的距离超过了无人机的最大飞行距离,那么该循环将持续至新检修高压线路最优路径清单中的下一节点,直到找到一个可行的路径。
1.3 无人机协作通信多链路调度
将基于多链路传输的调度方案与信道复用技术相结合,实现多路传输协议的跨层优化。将无人机协作通信的多链路调度定义为簇首和簇成员之间的传输时间分配,将无人机多链路调度定义为空分信道重用[8]。重点研究簇内和簇间多链路调度下的簇数和多链路调度策略,以最小化无人机的高压线路检修能量消耗为目标,满足特定的吞吐率需求。
在无人机多链路调度的理论框架下,利用传输时隙计算和空域信道重用2 种技术进行研究。基于传输时隙计算技术可以实现对簇首和簇内各节点能量的合理分配,解决簇首节点能量消耗过大或能量消耗不均等问题。空域信道重用技术可以在同一时隙内实现不同空分信道的复用,提高信道利用率和数据传输速率。通过为无人机高压线路检修的远程通信分配更多的发送时间,可以有效减少远程通信的发送能量消耗,从而达到降低无人机总体能量消耗的目的。
2 实验测试与分析
为证明文章提出的高压线路检修中无人机协作通信多链路调度方法的有效性,将该方法、传统调度方法(简称方法1)和基于贪婪算法的调度方法(简称方法2)进行对比分析。在实验中,方法1 是将所有链路都激活,对每个链接进行一次计算;方法2 是按照链路的信道增益,采用由大至小的顺序排列所有的链路,然后逐一判断每个链路,直到其收敛。
本次实验选用Matlab 软件作为实验平台,对3 种方法进行对比测试。实验数据集是在100 m×100 m 的地图上随机挑选30 对节点。设置实验平台的单元格大小为5 m×5 m,卷积核大小为21×21,神经网络隐藏层数目为3,传输功率为1 W。
当处于高压线路检修环境时,仿真分析采用文章所提方法、方法1 和方法2 时的误码率性能。在相同的信噪比条件下,每种方法都进行了10 次模拟,得到的误码率平均值就是模拟结果。在模拟平台上使用不同的信道估计算法,3 种方法的链路调度误码率性能对比如图3 所示。
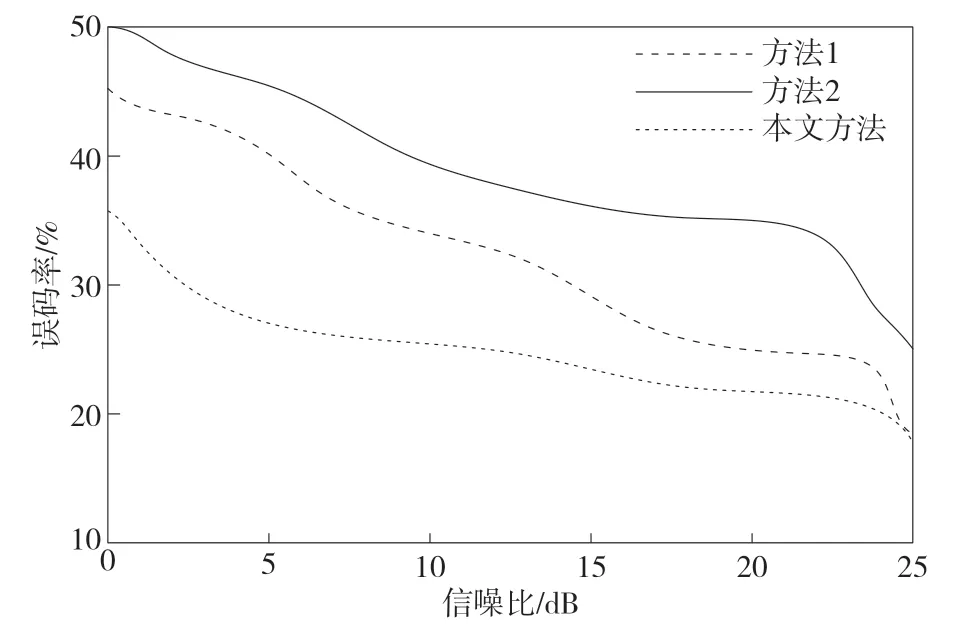
图3 误码率实验结果
由图3 可知,在不同的信噪比情况下,使用文章所提方法的误码率远小于方法1 与方法2。
为进一步验证本文方法的有效性,对3 种方法的链路收发信号延时进行测试对比,结果如表1 所示。
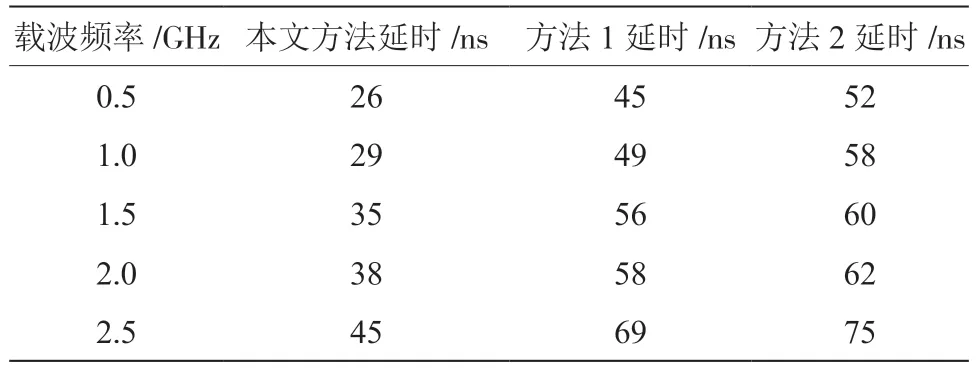
表1 收发信号延时结果
由表2 可知,在载波频率增长的情况下,链路收发信号的延时也随之增加,但文章所提方法的延时始终小于方法1 和方法2 的延时,具有更高效的链路调度优势。
3 结 论
无人机协作通信多链路调度方法在高压线路检修中具有巨大的潜力和优势。通过选择无人机检修高压线路最优路径,可以实现无人机之间的信息共享、任务协调和数据传输,提高线路检修的效率和安全性,为电力行业带来重要的经济效益和社会效益,同时推动无人机技术的发展与应用。随着技术的不断进步和应用场景的拓展,高压线路检修中无人机协作通信多链路调度方法将得到更加广泛的应用。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
移动通信(2021年5期)2021-10-25 11:41:48
作文成功之路·小学版(2019年8期)2019-09-18 01:12:04
读者(2017年14期)2017-06-27 12:27:06
读写算(下)(2016年9期)2016-02-27 08:46:31
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:42
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:44
电子工业专用设备(2015年4期)2015-05-26 09:10:39
电子设计工程(2015年8期)2015-02-27 12:05:33
中国交通信息化(2014年3期)2014-06-05 03:07:09