
北斗+低轨通导一体位置服务网络与低空经济应用
2023-12-25 00:59:46贾诗雨蔚保国
信息通信技术 2023年5期
贾诗雨 蔚保国 刘 亮
1 卫星导航系统与装备技术国家重点实验室 石家庄 050081
2 中国电子科技集团公司第五十四研究所 石家庄 050081
引言
低空经济一般是指海拔3 000米以下的飞行经济活动,主要是民用通用航空飞行器和无人机。全球低空经济尚处于起步阶段,但潜力巨大。随着地面交通拥堵问题的日益严重和无人机技术的逐渐成熟,全世界都在积极探索培育低空经济产业。据统计,美国的低空经济以载人飞机通用航空业为主,每年可产生超过1 500亿美元的GDP[1]。中国截至2022年底,全国无人机运营企业1.5万家,年产值1 170亿元。
目前低空飞行的监管主要以政策为主,缺乏有效的技术监管手段,尤其是近年来飞速发展的“低小慢”飞行器,“看不见、叫不到、管不住”的问题尤其突出。受限于定位导航技术、通信技术、感知技术、计算能力和智能算法的发展进程,导致政府难以对低空进行有效的管控,企业得不到满足要求的飞行管理服务,严重制约了低空经济的发展[2]。国家对于低空经济和低轨通导一体化位置服务的发展的政策扶植也逐步加强,2021年,中共中央、国务院印发《国家综合立体交通网规划纲要》[3]。2023年6月,《无人驾驶航空器飞行管理暂行条例》颁布[4]。另外我国规划的国家综合PNT体系中,也提到了利用北斗+低轨通导一体的位置服务网络作为无人机和智能驾驶等未来新应用的基础服务设施。北斗+低轨通导一体的位置服务网络作为新型基础设施的一部分,将为低空经济的发展做出巨大的贡献。
1 问题及挑战
现阶段我国低空管理相关标准的发布较为滞后,各个厂家各自为战,无法有效实施统一管理。为确保低空飞行安全,实现低空全空域内航空器可观测、可通信、可管理,中国工程院樊邦奎院士建议,应加强无人机行业应用顶层设计,建设低空智联网[5],其中北斗+低轨通导一体化位置服务网络将是未来低空智联网的重要基础设施。
我国现有的通信、导航和监控(CNS)基础设施仅能满足对高空飞行器的管理需求。随着无人机产业的发展,目前的系统无法满足无人机城市物流、巡检等新低空应用CNS的需求。基于低空空域环境复杂性和飞行器智能化的需求,需要解决以下方面的问题与挑战。
1)飞行器定位精度问题:卫星导航系统可以在开阔场景为无人机提供全天时的精准位置和时间服务。但是由于卫星导航信号本身信号落地功率弱,在城市低空这种信号遮挡较多、电磁环境复杂的运行场景,无法提供泛在、高精度导航定位服务。
2)飞行器通信问题:通信是将飞行器定位结果回传和实现飞行器管控的重要手段。目前民航通信主要通过VHF电台实现管制台与飞行员的语音通信,无法实现数字化控制;无人机通信一般只能实现无人机飞手与无人机之间一对一的通信,无法满足未来数字化统一管理运行的需求。
3)飞行器导航问题:低空活动高频次、高密度的飞行特点要求更加数字化精细化协同化的飞行器导航模式,而非传统航空采用的航点(waypoint)模式,或者无人机的目视导航模式。
4)飞行器的监视问题:目前高空航空监视主要以广播式自动相关监视(ADS-B)为主,但是其有限信道不足以支撑低空大容量的飞行模式。另外ADS-B系统主要以卫星导航系统作为导航源,导航信号极易受到干扰和欺骗,这使得ADS-B航空监视的可信性和完好性大大降低。
综上,现有CNS系统的能力还不能支撑未来低空环境下数字化无人系统等的高精度定位、通信、导航和监控服务需求,需要北斗+低轨通导一体化位置服务网络提供泛在精准可信的位置服务来解决低空服务中定位精度不足、数字化导航能力缺失和监视信息连续性/可信性/完好性差的问题;提供高容量低时延的低轨通信服务来解决飞行器数字化通信管理缺失和监视容量不足的问题。
2 主要技术路线
为了解决目前低空环境下无人机数字化精准运行面临的定位精度、通信、导航和监视问题,需要北斗+低轨通导一体化位置服务网络提供泛在精准可信的位置服务和高容量高可信的低轨通信服务,主要技术路线如下。
2.1 泛在精准可信的位置服务技术路线
为解决低空复杂环境下定位精度不足以及抗干扰能力不强的问题,提高复杂环境下的低空飞行器监视的连续性、可信性以及完好性,科学界提出多种导航技术与算法。其中通导一体化技术由于可以实现通信导航的相互赋能,是提升位置服务能力的重要途经,是解决低空环境下无人机泛在精准可信导航问题的首选方案[6-7]。
通导一体化是指通信和导航系统通过信号、信息、平台、网络等多层次的一体化设计,实现通信导航业务能力的协同与增强,通导一体化可划分为信息增强、信号协同、体制融合三个方向。
信息增强是指通信导航系统保持各自基本体制不变,打通通信与导航系统的信息交互接口,实现服务能力的互增强,导航系统利用通信传输的增强信息,可以大大缩短定位收敛时间,并且提升抗欺骗、抗干扰的能力,从而解决低空服务中飞行器监视信息连续性/可信性/完好性差的问题。
信号协同是指直接利用北斗信号和低轨卫星播发的低轨导航信号或通导一体化信号进行联合解算,利用几何构型变化剧烈的低轨卫星导航信号、低轨通导一体信号内播发的辅助改正信息实现分米级动态定位服务。从而解决低空服务中飞行器的定位精度不足和覆盖范围不全的问题。
体制融合是指在系统设计研发之初,即同步考虑了通信导航需求,进行低轨卫星通信导航信号体制的一体化设计,进而研制出兼具通信导航能力的通信定位设备,提供通导一体化服务[8],从而解决低空服务中飞行器数字化导航监视能力缺失的问题。
2.2 高容量低时延的低轨通信服务技术路线
通信是将飞行器定位结果回传和实现低空飞行器管控的重要手段,低空交通体系需要高容量低延时的通信服务网络。现有的低空飞行器通信往往基于单一技术,存在通信盲区。目前低空无人机采用专用无人机地面测控设备或者4G/5G信号进行监视及管控,由于信号覆盖范围限制,无人机作业范围有限,尤其对于长航时无人机的远距离超视距飞行,卫星通信手段是必要甚至是唯一的通信保障手段[9]。
针对4G/5G等地面通信网络系统覆盖范围受限的制约,卫星通信系统的广域覆盖能力可成为地面通信系统的重要补充,但是高轨卫星由于距离较远,通信容量有限,无法满足未来低空场景大容量实时的监视服务需求,所以需要北斗+低轨通导一体化位置服务网络提供高容量低延时的低轨通信服务。
通过低轨卫星通信和其它地面通信组合可实现更大范围更高容量的低空通信。通过研究星地融合网络架构、星地融合网络无缝切换接入技术,实现多种异构接入网络的融合通信、多样化的接入服务,以及无缝的通信链路切换,根据不同的通信应用场景,实现通信方式的选择和切换,解决低空服务中飞行器数字化通信管理缺失和监视容量不足的问题。
3 网络基本框架
北斗+低轨通导一体化位置服务网络由北斗卫星导航系统、低轨通导一体化卫星、地面导航信号监测网和北斗+低轨位置服务平台组成。北斗+低轨通导一体化位置服务网络具备基于网络化时空资源统一管理与协同监测,可实现具有“泛在、精准、可信”特征的位置服务和具有“高容量、低延时”特征的低轨通信服务。图1为北斗+低轨通导一体化位置服务网络组成示意图。
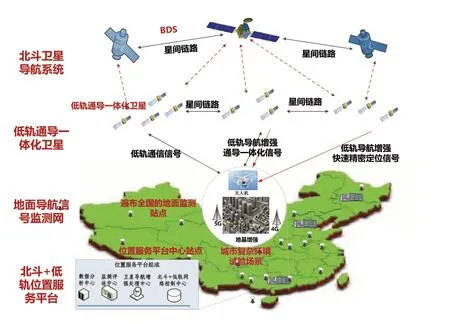
图1 北斗+低轨通导一体化位置服务网络组成
3.1 北斗卫星导航系统
北斗卫星导航系统是北斗+低轨通导一体化位置服务网络的基础,低轨导航信息增强服务、低轨快速精密定位服务北斗+低轨通导一体化位置服务网络都以北斗三号为核心,其他的低轨通导一体化位置服务都是在其基础上的补充、改正、增强和改进,可以配合北斗+低轨通导一体化位置服务网络的其他系统为低空飞行器提供“泛在、精准、可信”的位置服务。另外北斗系统的RDSS通信服务也可以作为卫星通信服务的备份手段,提高低空通信服务的容量。
3.2 低轨通导一体化卫星
低轨通导一体化卫星是北斗+低轨通导一体化位置服务网络的核心节点,承载无缝覆盖的快速高精度定位服务。利用低轨卫星运行速度快、可观测性强等特点实现高中低轨的联合定轨和精密授时,并实现应用侧低空无人机的快速高精度定位能力[10]。低轨星上搭载标准低轨导航增强载荷,实现低轨卫星时空基准建立与维持、低轨信号播发以及增强信息传递。目前低轨通导一体化卫星网络主要依托国家卫星互联网工程进行建设。
传统导航依赖卫星导航系统且服务覆盖范围仅为室外开阔空间,北斗+低轨通导一体化位置服务网络引入低轨卫星通信导航信号,能够提供导航手段更加多源、导航方式更加多样、能够覆盖低空经济活跃的更多复杂场景。
相较于传统导航系统提供的5~10米量级定位精度,北斗+低轨通导一体化位置服务网络利用几何构型变化剧烈的低轨卫星、云端辅助改正信息快速生成与播发能够提供分米量级定位服务[11-12],低空用户定位精度与速度得到大大提升。
相较于传统的高轨通信卫星,低轨通导一体化卫星可以支持更大的空域通信容量和更低的延时,支持更高密度的低空用户。
3.3 地面导航监测网
地面导航监测网是由遍布全国的地基监测站点组成,具备监测北斗卫星、低轨卫星下行信号能力。地基监测站点监测的全国观测数据以及低轨星星载观测数据传送至北斗+低轨位置服务平台,支持形成低轨星基增强的快速高精度定位服务能地力。地面导航监测网是提供精准、可信位置服务的保障。
3.4 北斗+低轨位置服务平台
北斗+低轨位置服务平台是实现北斗+低轨卫星通导一体化导航位置服务的数据处理平台,可实现北斗+低轨通导一体化定位、管制服务的推送。其服务的可信性由网络中居于“第三方”位置的北斗+低轨位置服务平台提供保障,监测评估中心可完成网络中各种导航源信号域/信息域多维度评估[13-14],监测评估信息实时推送云端服务中心进行比对,确保提供低空位置服务的可信性。
4 服务能力
北斗+低轨通导一体位置服务网络旨在为全球低空用户在GNSS的基础上提供低轨导航定位增强服务,实现协同、融合、智能、全覆盖、全天候、全领域的定位服务,为低空经济中的通航载人飞行、无人物流、无人机巡检、无人机测绘、无人机遥感等领域提供高精度定位解决方案。
北斗+低轨通导一体化位置服务网络可以同时从信息增强、信号协同和体制融合三个方面来增强低空城市环境下导航位置服务能力。
4.1 低轨导航信息增强服务
低轨导航信息增强服务利用低轨卫星的通信链路,播发北斗系统导航电文、精密改正数等信息,辅助低空用户提高定位精度,缩短首次定位时间。另外利用低轨通信链路为用户提供高容量、低延时的低轨通信服务。
北斗+低轨导航信息增强服务流程如图2所示,地面段通过地面网络从其他系统或网络获得北斗系统导航电文、精密改正数等导航增强信息,通过信关站上注给低轨卫星,低轨卫星将导航增强信息播发给低空用户。

图2 北斗+低轨导航信息增强服务示意图
信息增强不提供额外的距离观测量,只提供北斗/GNSS系统导航电文、消除GNSS误差的修正信息和完好性信息。低空用户通过通信链路接收导航电文速率较高,能够缩短首次定位时间;通过接收增强信息实现定位误差修正,最终提高定位精度。
导航信息增强中GNSS精密电文提供的轨道精度为5cm,钟差0.15ns,通过低轨卫星快速播发,辅助GNSS进行精密单点定位(PPP)。本节采用实际观测数据,利用GNSS精密轨道和钟差(精度5cm),分析导航信息增强定位精度。在一天时间内,低空用户定位误差如图3所示。

图3 北斗+低轨导航信息增强服务示意图
由图3的定位结果,低空用户定位误差在水平和垂直方向上均优于1分米,可实现低空城市场景下亚米级高精度定位服务。综上,低轨导航信息增强服务可以解决城市低空复杂环境下的定位速度慢和定位精度差的问题。
4.2 低轨导航信号协同定位服务
低轨导航信号协同定位服务是指利用低轨卫星播发低轨导航增强信号,利用北斗信号和低轨导航增强信号进行协同定位服务。低轨卫星导航信号具有较好的穿透性、抗干扰型和防欺骗性,可以在城市低空复杂环境中提供实时有效的高精度导航定位服务。另外低轨卫星运行速度较快,在一定时间内几何构型变化较快,能够很好地改善GNSS系统的空间构型,可以大大缩短低空无人机的首次定位时间和信号中断后重新定位时间。
低轨卫星播发的快速精密定位信号类似导航信号,同样在L频段,调制有伪码可实现伪距的测量,由于低轨卫星的特点,信号落地电平超过一般导航信号20dB以上,并且其导航电文中包含北斗系统导航电文、精密改正数等导航增强信息。地面段通过地面网络从其他系统或网络获得北斗系统导航电文、精密改正数等导航增强信息,通过信关站上注给低轨卫星;低轨卫星根据上注信息播发导航增强快速精密定位信号,无人机终端同时接收北斗导航信号和低轨导航增强快速精密定位信号进行联合解算,可实现分钟级收敛和分米级高精度定位。当导航信号遮蔽或者干扰严重时,也可以使用低轨快速精密定位信号独立定位,大大提高城市低空导航定位服务的完好性和可用性。北斗+低轨卫星联合快速精密定位服务流程如图4所示。

图4 北斗+低轨卫星联合快速精密定位服务示意图
低轨卫星参与联合解算相当于增加新的系统,需要考虑系统间偏差,以最终实现北斗+低轨通导融合联合定位。对于北斗+低轨卫星联合定位,为了推导简洁这里不考虑各种误差源的影响,得到如下观测方程:
为解算低空用户的实时位置,必须将2个时间系统中的卫星在轨位置划归到同一时间尺度下,而且必须将2种坐标系下的卫星位置转换到同一种坐标系中。北斗+低轨卫星联合定位组合定位计算时,每个系统都有自己的时间系统,并且各时系间存在一定偏差。所以,在多系统组合算法中针对每个系统引入不同的接收机钟差参数,对上述两个公式线性化从而有以下多系统组合算法的数学模型:
令
采用上述解算方法,结合54所发射的天象1号低轨实验卫星发射的快速精密定位信号进行在轨实验,单北斗与北斗+低轨快速精密定位误差序列如图5所示。

图5 单北斗与北斗+低轨快速精密定位误差序列
由图5可知快速精密定位精度优于单北斗定位精度,在定位收敛后可以实现分米级高精度定位。
当GNSS与低轨卫星轨道与钟差误差时,为了减少随机观测噪声对收敛时间的影响,进行500次蒙特卡罗仿真,其中当低轨卫星空间信号测距误差(SISRE)分别为0、0.03m、0.05m、0.08m、0.1m时的收敛时间统计如图6所示。

图6 不同低轨卫星SISRE时PPP收敛时间变化情况
由图6可知,低轨卫星的伪距误差小于0.05m时,可以支持快速精密定位服务实现分钟级收敛。
4.3 低轨导航体制融合服务
低轨导航体制融合服务技术是指在系统设计研发之初,即同步考虑了通信导航需求,进行了通信导航信号体制的一体化设计。低轨导航体制融合服务技术是利用低轨卫星的通信信号,在通信信号内部调制导航信号,利用通信信号传输的空余资源来进行导航服务,可以为低空用户提供更加泛在、更加可信的位置服务。
但是由于通信信号没有调制伪码,无法进行通过伪距测量的方法来进行定位,所以低轨卫星通导一体化服务通常利用L频段进行单星多普勒定位。由于直接测量瞬时多普勒频移较为困难,故采用测量一定时间间隔内的多普勒周数的方法进行相对多普勒测量。单星多普勒定位的基本方程为
单星多普勒定位原理是利用连续观测的卫星到测站的多普勒数据进行定位。对于一次观测,单星多普勒观测量的解可以由与测站速度方向成某一夹角的圆锥面来表示,如图7所示。

图7 接收机与星多普勒几何关系
当接收机位置静止时,低轨卫星过境时低空用户不断采集数据,由于低轨卫星运行速度较快,几分钟内即可呈现出较大的几何构型变化,假设认为此时段内接收机和卫星钟差稳定不变,那么单星多普勒定位的原理图如图8所示。不同历元形成了不同的圆锥面,每个圆锥面均可列出一个方程,多个圆锥面之间存在交集,其交点即为测站解算的位置。
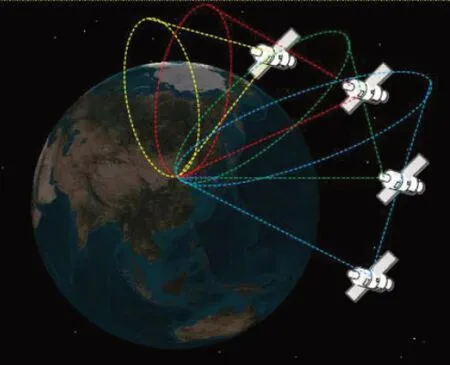
图8 单星多普勒定位原理图
低轨卫星轨道轨道高度较低,一般在几百千米到两千千米左右,其发射信号空间损耗较小。低轨卫星通信信号强度比北斗强大约30dB。因此低轨卫星通导一体化服务可以拓宽服务范围与场景,使在一些低空遮蔽环境、城市峡谷中的定位导航授时成为可能。
5 未来展望
目前,在国内积极的政策环境中,市场主体以及国资平台积极入局,探索低空经济各类场景的创新突破,已经形成载货、载人、城市管理、精准农业等场景[15]。
未来随着低空运行进入到大容量高密度的发展阶段,飞行和飞行监控必然都不可能仅依赖人的参与控制,需要更加智能化的系统能力,提升航线规划、飞行避障、多任务协同、监管调度等各个方面的数字化水平。未来北斗+低轨通导一体位置服务网络提供的泛在、精准、可信位置服务和高容量、低延时低轨通信服务将推动低空经济向着无人化、精准化和智能化的方向发展。
1)货运场景
在未来北斗+低轨通导一体位置服务网络、低空数字孪生空间和低延迟的低空通信监控网络的配合下,可以实现无人机的自主航线规划和避障,实现城市环境下三维点对点的物流。
图9为基于北斗+低轨通导一体化位置服务网络和低空空域数字孪生空间[16]的物流无人机自主任务规划及避障的未来无人机物流典型运行场景。当接到无人物流任务后,会在数字孪生空间进行统一的任务与航路规划,确认无飞行冲突后进行任务的执行;在执行过程中利用北斗+低轨通导一体位置服务网络提供的泛在、精准、可信的位置服务进行导航;利用5G地面监控链路进行任务执行监控,当5G地面监控链路不可用时,利用北斗+低轨通导一体位置服务网络提供的高容量、低延时低轨通信服务进行任务监控,实现全球无缝监视,提升系统的可靠性;调度中心监视运营范围内的所有无人机,负责飞行冲突预警并将预警信息及时报给无人机,实现任务重新规划和避障。最终在北斗+低轨通导一体位置服务网络、低空数字孪生空间、地面5G网络和调度中心的配合下完成无人机物流配送。
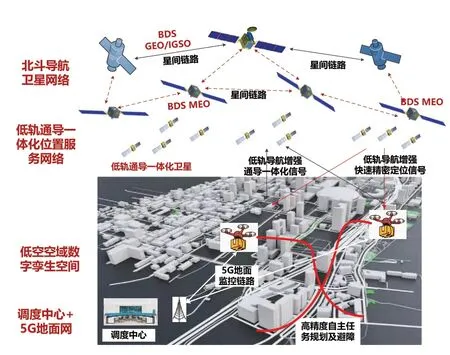
图9 未来无人机物流典型运行场景
2)载人场景
作为直升机运营方的各通航企业不断拓展航线及飞行架次,如东部通航建设与管理运行机场达30个以上,不断延伸业务至跨境、商务、城际、游览、应急等众多场景;而以亿航、小鹏汇天为首的载人级自动驾驶飞行器企业也在各个地区试点运行。
未来北斗+低轨通导一体位置服务网络、低空数字孪生空间和低延迟的低空通信监控网络等基础设施的建设让低空载人自动驾驶航线设立与管理成为可能,未来出行人类可能会乘坐空中“飞行的士”。
3)城市管理场景
因巡检、救援等场景替代人效应明显,商业模式已基本跑通,该场景目前发展最为成熟;且由于尺寸类似于消费级无人机,飞行审批也相较其他场景简单。
未来伴随北斗+低轨通导一体位置服务网络、低空数字孪生空间和低延迟的低空通信监控网络等基础设施的构建完善,无人机巡检、救援、植保等场景将进一步渗透。
猜你喜欢
中文信息(2018年3期)2018-06-11 01:47:46
北京航空航天大学学报(2017年9期)2017-12-18 07:12:31
中国公共安全(2017年7期)2017-10-13 08:18:19
中国公共安全(2017年8期)2017-10-13 08:12:24
南方文学(2016年3期)2016-06-12 13:54:34
中国房地产业(2016年8期)2016-03-01 01:26:16
兵器知识(2016年2期)2016-01-29 16:45:07
探索(2015年3期)2015-04-17 02:36:40
全球定位系统(2015年4期)2015-02-28 12:38:15
电力需求侧管理(2014年5期)2014-03-20 13:35:57
