激光多普勒测振技术在固体火箭发动机试验中的应用研究综述
2023-12-25 03:08何宪光沈飞谢俊彦
环境技术 2023年11期
何宪光,沈飞,谢俊彦
(西安航天动力测控技术研究所,西安 710025)
引言
随着科学技术的不断发展以及航天工业对产品可靠性和环境适应性要求的不断提高,固体火箭发动机的高可靠性成为军工行业的发展重点[1]。振动试验数据做为固体火箭发动机可靠性评判的重要参考指标,其意义不言而喻。通过振动测量试验,可以对固体火箭发动机的疲劳寿命、壳体以及喷管等重要部位的固有频率、损伤诊断等进行计算和分析。总而言之,固体火箭发动机在火箭发射、飞行和储运条件下所需经历的各种振动都能通过振动试验进行模拟和分析[2]。
目前振动检测的方式可以分为接触式振动测量与非接触式振动测量两种形式[3,4]。在固体火箭发动机点火试验中,常用的振动检测方式为接触式振动测量,如压电式加速度传感器。然而这类传感器耐高温性差、测量时有脱落的可能,比如喷管部位,这就导致振动数据的可靠性与准确性降低。与接触式检测相比,非接触检测技术具有测量精度高、非侵入性、适用于高温环境等优点,能够很好地满足各种测量环境的需求[4,5,7-10]。目前几种常用的非接触检测方法都是基于激光技术的,激光测振技术被广泛应用于众多领域之中,相关的研究层出不穷。然而,近年来有关于激光测振技术在固体火箭发动机方面的应用研究较少。本文将对激光测振技术在固体火箭发动机方面的应用研究进行综述。全文分为四个部分,第一部分对主流的激光测振技术的原理进行了介绍,并进行了对比;第二部分分析了固发振动测量中特殊的环境因素对激光测振系统的影响;第三部分介绍了国内外针对于各种影响因素所提出的解决方法;最后对全文进行了总结。
1 激光测振法分类
目前主流的激光测振法主要包括激光三角法、全息干涉测量法、激光散斑干涉法和激光多普勒法[11]。本节将对这四种光学测振法的原理进行介绍。
1.1 激光三角法
激光三角法本质上是利用光学几何原理获取被测物体的振动信息[12]。激光三角法的光学原理图如图1 所示。

图1 激光三角法光学原理图
激光通过透镜M1 照射到被测物体表面,形成光斑O 点,其部分散射光由透镜M2 接收并汇聚到光电探测器(PSD)上,形成光点O′,当物体发生振动时,光斑O 点移动到P 点,PSD 上的光点O′也随之移动到了P′,且物体的移动距离和PSD 上光点的移动距离存在如下关系[11,13-17]:
由此可见,激光三角法是通过位移信号来反映物体的振动情况。激光三角法具有非接触测量、结构简单等优点,技术发展较为成熟,但测量的范围受PSD 的尺寸影响,测量距离也受会聚透镜的焦距限制,并不适合用于固体火箭发动的振动测量。
1.2 全息干涉测量法
全息干涉测量即是利用全息干涉的原理,用相干光照明物体在全息照片上形成干涉条纹,因为条纹都携带了关于物体运动或形变的信息,因此我们可以根据干涉条纹的分布来分析物体发生的运动或形变[18]。全息干涉测量法最大特点就是可以进行面测量,同时获得多点的数据[12]。图2 所示的是全息干涉测量在纳米样品测量中的光路图。
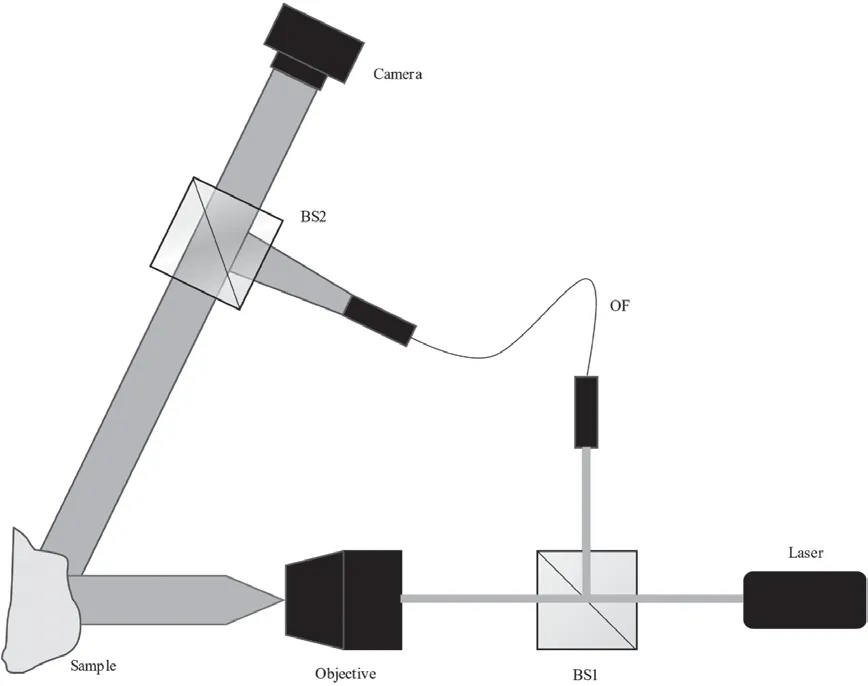
图2 全息干涉测量光路图
激光束通过分束器(BS1)分为参考光束和目标光束,参考光束被引导通过光纤(OF),目标光束被显微镜物镜扩展后照射到物体上,扩展后的目标光束被物体反射并通过分束器(BS2)与参考光束发生干涉,形成干涉图案[19-22]。全息干涉测量法能够对物体进行全场同时测量,但由于全息干涉测量法要用胶片做记录介质,需要冲洗等费时费力的化学过程,操作过程复杂,且记录信息过多,信号的信噪比低,而且全息干涉测量法不能实现实时测量[11, 12, 23]。
1.3 激光散斑干涉法
激光散斑干涉法是利用激光的高相干性,激光照射到物体粗糙表面时将产生散斑场,该散斑场记录了被测物体表面的信息,并对该散斑场进行数字图像处理,就能以干涉条纹的形式得出被测信息的等高线,通过条纹判断使能得到振动物体的位移[11,23-25]。激光散斑干涉法的光路图如图3 所示。
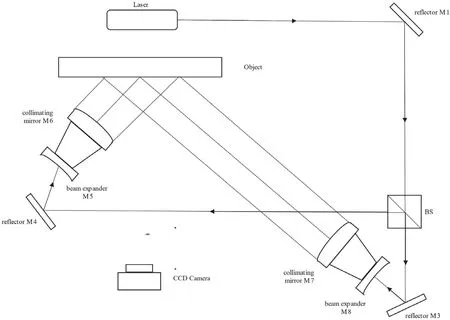
图3 激光散斑干涉光路图
激光通过反射镜M1 反射至分光镜BS 后分成两束光强相等的相干光,这两束相干光分别经过反射镜M3、M4,扩束镜M8、M5,准直镜M7、M6 后照射在物体表面并发生干涉形成散斑场,当物体产生振动时,散斑场也随之变换,散斑场的变化由CCD 摄像机记录,通过对散斑场的变化分析最终得到物体的振动信息。散斑干涉测量精度高、能够全场测量,但操作过程复杂,且干涉条纹图的处理极其费时。
1.4 激光多普勒法
激光多普勒法是利用外差干涉原理和多普勒效应进行振动测量[6]。图4 为一个典型的外差式激光多普勒测振仪光路图。
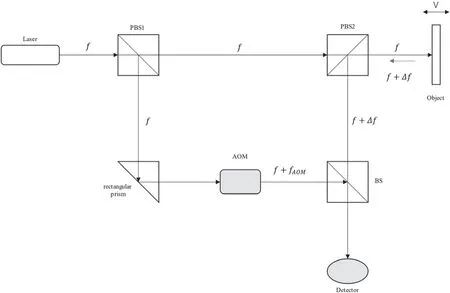
图4 外差式激光多普勒测振仪光路图
激光器发射出频率为的激光,该激光通过偏振分束器PBS1 后被分为参考光束和测量光束。其中参考光束经棱镜反射后通过声光调制器AOM,参考光束的频率变为f+fAOM(fAOM声光调制器的调制频率),测量光束通过偏振分束器PBS2 后照射到物体表面,在物体表面发生漫反射,反射光的频率变为f+Δf,其中Δf为物体运动所产生的多普勒频移。反射光经过偏振分束器PBS2 和分束器BS 后,与参考光束发生干涉,最后的光信号被光电探测器接收,后续再进行信号的处理与解调,最终计算得到多普勒频移Δf。且多普勒频移与物体的速度具有如下关系[6,26-28]:
式中:
V—物体的运动速度;
λ—激光的波长。
由此可见,激光多普勒法得到的是物体的速度信号,对该速度信号分别进行积分、微分运算可以得到物体的位移和加速度信号。激光多普勒法测量精度高、测量范围大、响应快、可实现实时测量、操作简单、应用范围广,非常适合对固体火箭发动机进行振动测量。表1 对激光测振技术进行了总结。
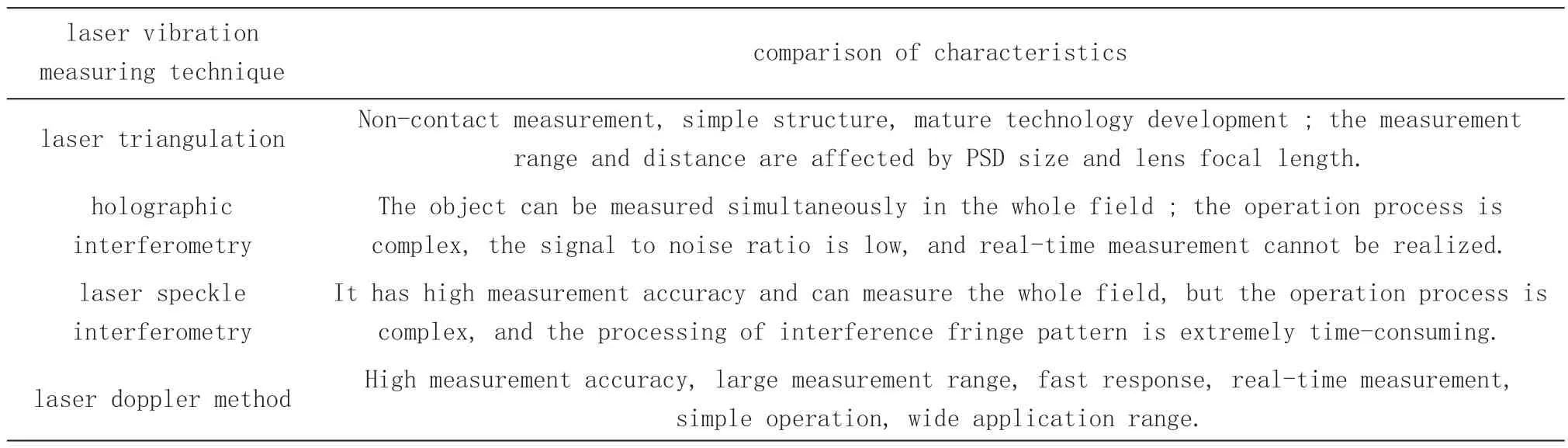
表1 激光测振技术分类
2 固发振动测量影响因素分析
激光多普勒测振技术做为非接触式振动测量技术的一种,其与传统的接触式振动测量技术的差异可以概括如下:
1)测量介质。传统的接触式振动测量传感器大多是通过传感器内部电路的电阻、电容或是电荷量的变化来反映被测物体的振动信息,而激光多普勒测振是通过参考光束与反射光束相干涉后计算得到的频率差来反映被测物体的振动信息[4-6]。
2)测量方式。传统的接触式测量是将传感器紧密安装在被测物体表面从而完成测量[3,4],而激光多普勒测量是通过激光器将激光照射到测点上进行测量。
3)测量系统。在固体火箭发动机振动测量试验中,由于信号传输距离较长,为防止信号衰减严重,在使用传统的接触式传感器进行振动测量时,还需要外置信号放大器对测量信号进行放大,而激光多普勒测振系统无需外置信号放大器对测量信号进行放大。
由于激光多普勒测振技术和传统的接触式振动测量技术有着较大的差异,所以传统的接触式振动测量技术所包含的测量方法以及数据处理方法并不能完全适用于激光多普勒测振技术,这就为激光多普勒测振技术带来了新的挑战,以下将以固体火箭发动机振动测量试验为背景概括几点:
1)测量稳定性问题。激光多普勒测振技术做为非接触式振动测量技术的一种,其独立于被测物体,故激光测振系统自身的稳定性必须得到保障。而在固体火箭发动机振动测量试验中,测量环境的强振动、强噪声等特殊因素使得激光测振系统自身的振动在所难免,这对振动数据的稳定获取带来了一定的影响。
2)数据处理方法选择问题。由于激光多普勒测振技术的测量介质、测量方式等与传统的接触式振动测量技术有着显著差异,故激光信号噪声的来源与形式也与传统的接触式振动测量信号有所不同,这就急需新的数据处理方法对激光信号进行处理。
本节将对固体火箭发动机振动测量环境进行介绍并分析环境因素对激光多普勒测振系统的影响。
2.1 环境的强振动
固体火箭发动机振动测量环境的强振动包括点火试验时热室地面的振动以及强噪声引起的振动。在固体火箭发动机点火试验中,发动机由台体固定,如图5 所示。

图5 固体火箭发动机
发动机点火后,燃烧室内的燃气和强大的推力引起发动机振动,同时使得试验场景振动,点火期间还伴随着剧烈的噪声。激光多普勒测振技术做为非接触检测技术,其测量仪器独立于测量物体,环境的强振动会使得激光头抖动,加剧激光测振仪与被测物体的相对运动,激光信号的噪声也由此而来。这类噪声被称为散斑噪声(speckle noise),而激光与被测物体的相对运动只是造成散斑噪声的原因之一[29]。
Yuanchen Zeng 等[29]在对散斑噪声进行分析时发现,散斑噪声在时域上是以随机峰值的形式出现,如图6 所示。
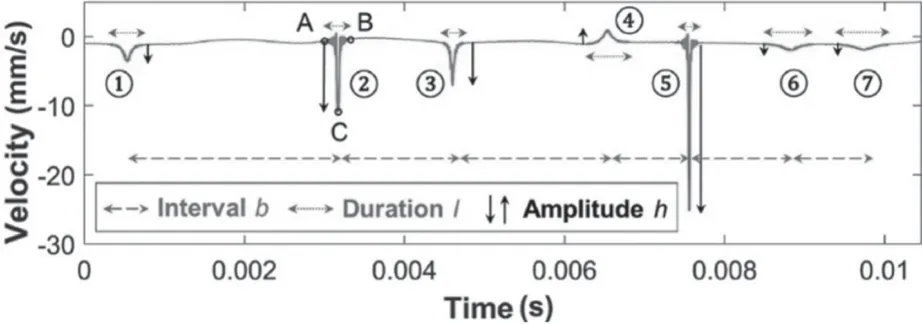
图6 LDV 移动平台测量样本(0.5 km/h)
由此可见,散斑噪声的表现形式与真实振动信号的表现形式类似,当散斑噪声的尖峰与真实振动信号的尖峰出现在不同时刻时,滤除散斑噪声是较简单的。
在频域上,散斑噪声表现为宽带噪声,且激光与被测物体的相对运动越剧烈,噪声的频带越宽,且噪声的低频部分可能与真实的振动相重合。结合散斑噪声在时域和频域上的特性可知,传统的滤波器难以对散斑噪声达到较好的滤除效果。
Yahui Wang 等[30]也在文中提到激光与被测物体的相对运动会对激光测量产生干扰,两者的相对运动使得激光难以聚焦到指定测点,从而对参考光束和测量光束的干涉产生影响,进而使得探测系统得到的多普勒相位不连续,从而导致激光信号中出现散斑噪声。
Ben J.Halkon 等[31]指出激光多普勒测振仪(LDV)本身的振动(无论是LDV 整体的振动还是内部光学元件的振动)都会引入额外的多普勒频移,从而导致被测物体速度测量的不准确,并且与目标速度的预期测量结果难以区分。在一些工程应用中,这一现象引起的测量误差较小,或是引起的误差在一定的频率范围内可以被忽略,但对于固体火箭发动机点火试验而言,这一现象应消除或是尽可能减小其造成的影响,否则LDV 的测量过程无法控制,导致测量数据的可靠性和准确性无法得到保障。
2.2 固发表面材料的粗糙程度
激光多普勒测振仪的信噪比强烈依赖于被测物体表面的光散射特性,即激光信号的信噪比与被测物体表面的光学特性息息相关,所以信噪比也是激光多普勒测振仪在许多工程应用中测量的主要限制[32]。Navid Hasheminejad[32]等人在文中指出,散斑噪声是激光多普勒测振仪主要噪声来源之一,并对He-Ne 扫描激光多普勒测振仪在不同表面条件下的噪声进行测量和分析。Navid Hasheminejad 等人分别对逆反射带条、白带条、黑带条以及沥青表面进行了对比实验,发现逆反射表面下的噪声最小,黑色表面的噪声最大,如图7 所示。
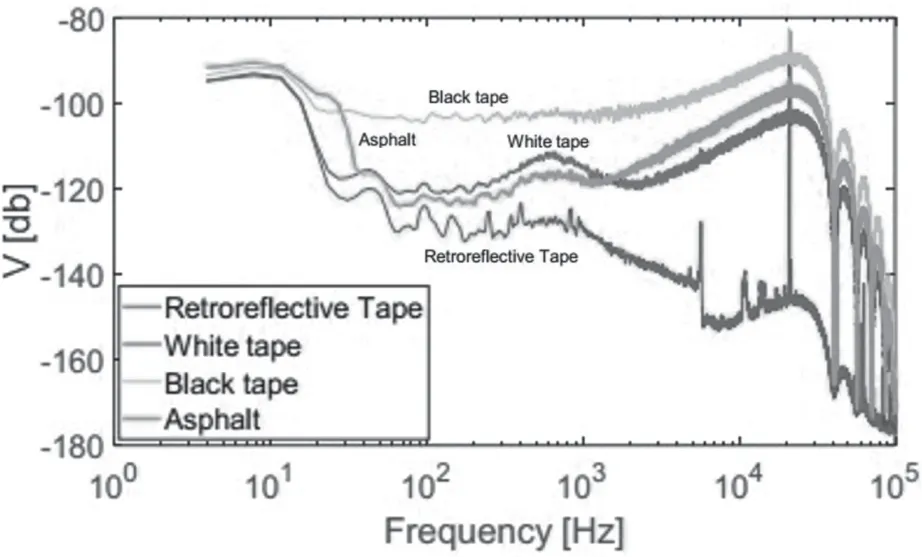
图7 He-Ne 激光在不同表面下的噪声测量
此外,在进行模态分析时,文中还对比了相同路面材料在涂漆和未涂漆状态下的相干函数,发现涂漆状态下的相干函数要比未涂漆状态下的相干函数好得多。
Chaitanya Bakre 等[33]提出,由于被测物体表面的非均匀反射率和波散射等多种因素的存在,被测物体表面的粗糙程度对激光测量会产生不利影响,并且被测物体表面的粗糙程度越大,激光信号中所包含的散斑噪声也越高[34]。因为激光多普勒测振仪在粗糙表面难以时刻聚焦,导致激光信号中有效信号的振幅降低,噪声变大。
2.3 水汽和烟雾
在固体火箭发动机点火试验中,台体冷却水蒸发形成的水汽和燃料燃烧形成的烟尘对激光的传输和接收都会产生一定的影响。Syed Haider Abbas 等[35]在进行螺旋桨叶片水下测量实验中指出,激光在水下传播会发生折射,这使得激光多普勒测振仪获得的物体速度取决于传播介质的折射率,故需要对测量得到的速度信号进行修正才能保证速度信号的准确性。由激光多普勒测量原理,即式(2)可知,被测物体的速度与多普勒频移相关,而多普勒频移则与参考光束和测量光束相干涉产生的光程差相关,当激光通过除空气外的其它介质时,传播介质的折射率也会对被测得的速度产生影响,如式(3)所示:
因此,要得到正确的物体的物理速度,必须将LDV的测量值除以流体的折射率。
Johannes Sachs 等[36]提到粒子的混杂程度对激光的传播有一定的影响,激光的散射会降低激光信号的信噪比,多重散射严重复杂化了从激光多普勒测量方法收集的数据中获得可靠信息。杨尚贤等[37]认为烟雾能够在一定时间和空间范围内对可见光、激光、毫米波等形成有效干扰和衰减。实际上,雾、气溶胶、降雨环境等不同的环境因素对激光测量都会产生干扰,影响激光的散射特性[38,39]。张克瑾等[39]在研究冰云、水云、雾、气溶胶和降雨环境中的激光传输特性后发现气溶胶对激光的散射最弱。
这一节主要是对固体火箭发动机振动测量试验中的主要影响因素进行分析,主要分为三部分,第一部分是测量时激光多普勒测振仪自身的振动造成的影响,由测量环境中的振动引起;第二部分是固体火箭发动机表面材料造成的影响,由激光测点的粗糙程度引起;第三部分是激光传播受阻造成的影响,由试验时产生的烟尘和水汽引起。而这三部分造成的影响也是散斑噪声产生的主要原因[30]。
3 散斑噪声降噪方法
散斑噪声做为激光多普勒信号中的主要噪声,是激光信号降噪过程中的重要目标[40]。Yuanchen Zeng 等[29]在文中提出了三步散斑降噪方法,即峰值检测、峰值估计、平滑,文中使用基于小波变换的方法对散斑噪声进行检测,接着基于ARIMA 模型对检测到的峰值进行替换,最后使用巴特沃斯滤波器对残余噪声进行滤除,三步散斑降噪方法如图8 所示。
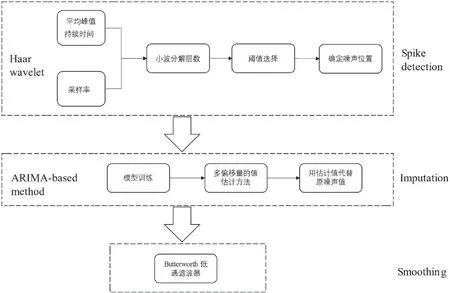
图8 三步散斑降噪方法
Yahui Wang 等[30]首先通过基于线性预测(LP)模型的去相关突出显示信号中的散斑噪声,为后面散斑噪声的检测和峰值替换做准备,然后以平均短时能量和峰度为判断指标对散斑噪声进行检测,通过对当前时刻的能量或是峰度与过去时间段的平均值的比值来检测散斑噪声,最后使用基于LP 模型的递归插值器逐个替换噪声信号,文中提出的降噪方法流程框架如图9 所示。

图9 降噪方法流程框架
Tao Lv 等[41]提出的散斑噪声去除算法的基本步骤是:①通过峰度比确定出现散斑噪声的信号段;②将确定的散斑噪声信号段视为数据丢失;③根据丢失数据附近的几个采样点值,利用线性预测估计方法填补丢失数据,最终达到散斑噪声去除的目的。与上述几位学者不同的是,Samuel W.Courville 等[42]同时在物理和数据处理两方面进行了散斑降噪处理。在图10 中,本文对散斑噪声的产生、表现形式以及降噪方法进行了总结。
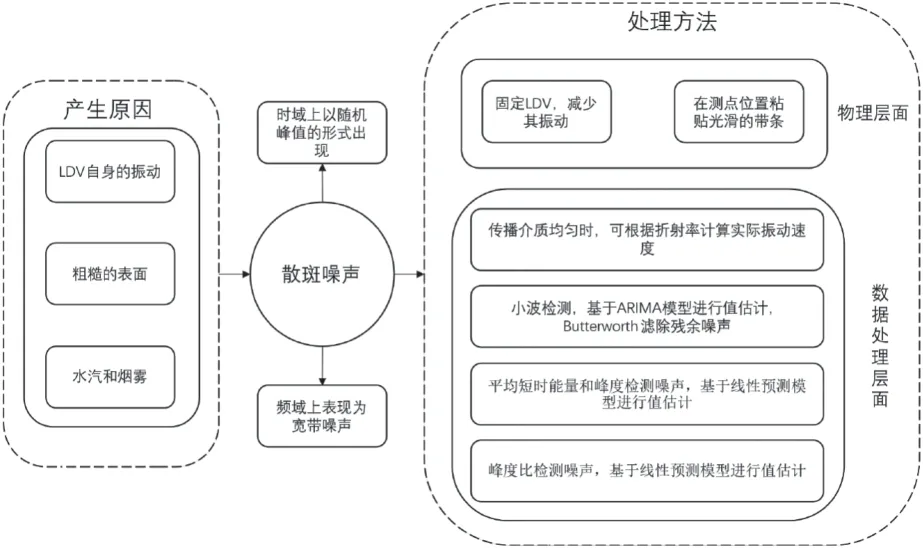
图10 散斑噪声的产生、表现形式以及降噪方法
4 总结
本文对目前主流的光学测振法主要包括激光三角法、全息干涉测量法、激光散斑干涉法和激光多普勒法的原理和存在的问题进行了介绍。通过对四种激光测振法的对比,本文得出激光多普勒测振法适用于固体火箭发动机试验的振动测量。本文还针对于激光多普勒信号中的散斑噪声,以固体火箭发动机振动测量试验为背景,主要介绍了散斑噪声的产生以及抑制方法,并从三个方面对散斑噪声的去除进行了总结。
猜你喜欢
奥秘(2021年3期)2021-04-12
上海电机学院学报(2021年5期)2021-02-11
数字通信世界(2021年2期)2021-01-13
雷达学报(2017年3期)2018-01-19
光学精密工程(2016年6期)2016-11-07
小朋友·快乐手工(2016年5期)2016-05-14
华东理工大学学报(自然科学版)(2015年3期)2015-11-07
小朋友·快乐手工(2015年10期)2015-11-02
红领巾·探索(2014年1期)2015-03-16
测绘科学与工程(2014年3期)2014-02-27