基于无人机倾斜摄影的建筑物精细化三维建模
2023-12-25 12:38:40张文龙
建筑与预算 2023年11期
张文龙
(山东港通智汇信息技术有限公司,山东 烟台 264000)
1 无设人备机选倾型斜摄影技术的测绘原理及
1.1 无人机倾斜摄影技术的测绘原理
无人机倾斜摄影技术对建筑为影像目标的获取,主要基于光学小孔成像原理。如图1 所示,空间位置中的目标点M,经过的光学投影后,达到成像平面R,对应的成像点W,由于目标点M与成像点W 的连线与相机平面的交点通过光心C,因此MW线也成为光轴,光心C在成像平面上的投影为C',两者的距离为焦距。假设M=(x,y,z,1)T,W=(x',y',z',1)T,根据三角形相似性准则可得[1]

(a)光学成像模型 (b)三角形相似性准则图1 无人机倾斜摄影技术成像原理
假设成像点W的像素坐标为(u,v,1)T,C'的偏移量为(uc,vc,1)T,可以得到坐标关系如公式(2)所示。
式中,α、β 均为缩放因子。
整理可得
假设目标点M的像素坐标为(u,v,1)T,可以得到目标矩阵如公式(4)所示
式中,λ为深度因子;fu和fv为尺度因子;fu=αf,fv=αf;γ为倾斜因子;A为相机内参矩阵。
1.2 无人机倾斜摄影技术的设备选型
目前,无人机倾斜摄影搭载平台按照其结构形式主要可以分为3 种,分别为固定翼、单悬翼和多悬翼[2]。不同结构形式的无人机倾斜摄影搭载平台的优缺点对比如表1 所示。
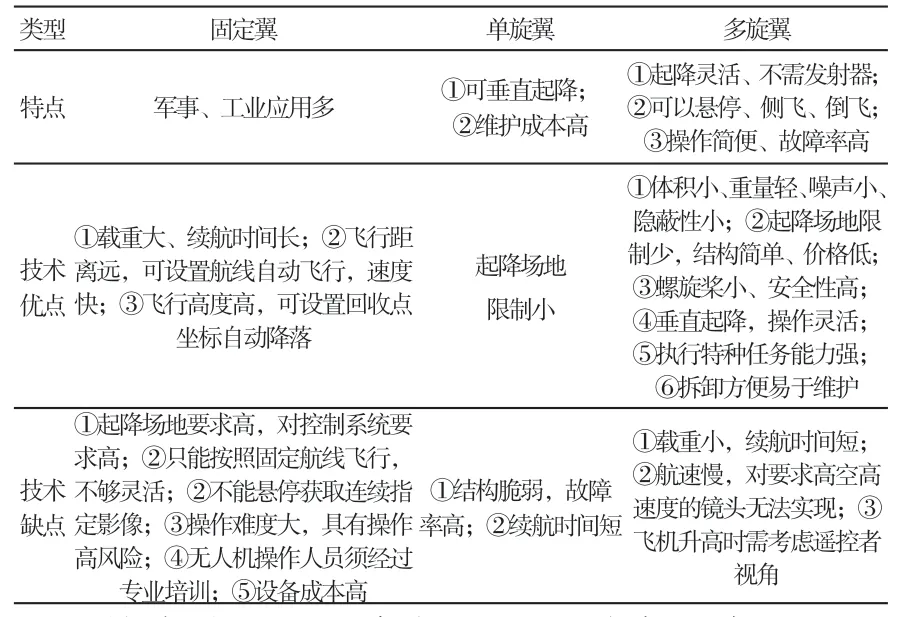
表1 不同结构形式的无人机倾斜摄影搭载平台优缺点对比
综合分析测绘条件和测绘效率要求,试验选用大疆Mavic2 Pro 四旋翼无人机搭载高精度高分辨力倾斜摄影摄像机作为数据采集设备。该型号无人机具有起降方便、速度可调、安全稳定、高分辨力和控制灵活等特点,能够满足高效的外业工作要求,适合大面积城市场景倾斜摄影数据的获取。无人机设备的起飞重量为908 g,最大上升速度为5 m/s,最大水平飞行速度为72 km/h,在S 模式下最大垂直下降速度为5 m/s,RTK 位置精度为水平1 cm+1 ppm、垂直1.5 cm+1 ppm,最长飞行时间为31 min,最大续航能力为18 km,最大抗风等级为5 级风,搭载的定位系统为GPS+GLONASS。无人机搭载的影像设备为睿铂DG4Pros 全画幅5 镜头倾斜相机,前后视镜头倾角为45°,左右视镜头倾角为50°,最大俯仰轴旋转角速度为300°/s,最大航向轴旋转角度为100°/s,最大俯仰角度为30°,摄像机传感器为1 英寸CMOS,具有有效像素2 000 万,镜头等效焦距28 mm,光圈f/2.8~f/11,电子快门速度为8~1/8 000 s,照相分辨率为5 472×3 648。
2 无人机倾斜摄影技术的三维模型构建
与传统的三维激光扫描建模、手工建模相比,无人机倾斜摄影建模具有明显优势,3 种不同的建模方法对比如表2 所示。在无人机倾斜摄影中,为构建目标建筑物的三维数据,首先需对研究区域图像进行数据采集,无人机设备搭载的光学相机按照导航装置和人工地面操纵的设置进行低空巡航,并从不同的角度对研究区域的地形地物进行光学摄影,以获得高精度的影像,并通过后期图片处理技术自动化和智能化地构建高分辨率的三维数据模型。建筑物三维模型的构建需经过外业数据采集与内业数据处理过程,具体的数据处理流程如图2 所示[3]。
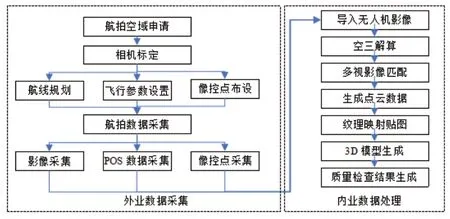
图2 无人机倾斜摄影技术数据采集及三维模型构建流程
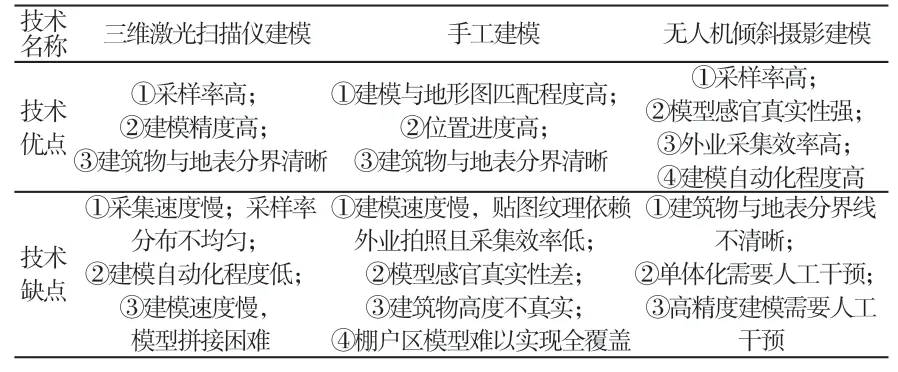
表2 无人机倾斜摄影技术三维建模与其他技术的对比分析
3 基于无人机倾斜摄影技术的建筑物三维建模精度分析
在无人机倾斜摄影技术的建筑物三维建模中,建模软件的选择至关重要。目前,主流的三维建模软件主要为大疆智图、Metashape、ContextCapture 和Pix4D Mapper,4 种三维建模软件的设备功能和设备特点对比如表3 所示[4]。为了研究这4 种不同软件的建模精细化程度,以山东省烟台市某城市街道建筑物为研究对象,运用无人机摄影设备获取不同建筑物的影像数据,如图3(a)所示,利用密集点云数据构建TIN(Trianglated Irregular Network)不规则三角网、提取特征点坐标,构建的建筑物TIN 不规则三角网络模型,建筑物的纹理和3D 虚拟模型主要通过实景模型与提取特制点的相互融合,结果绘制呈三维白膜模型如图3(b)所示[5]。

图3 基于无人机倾斜摄影技术的实景模型及白模构建效果
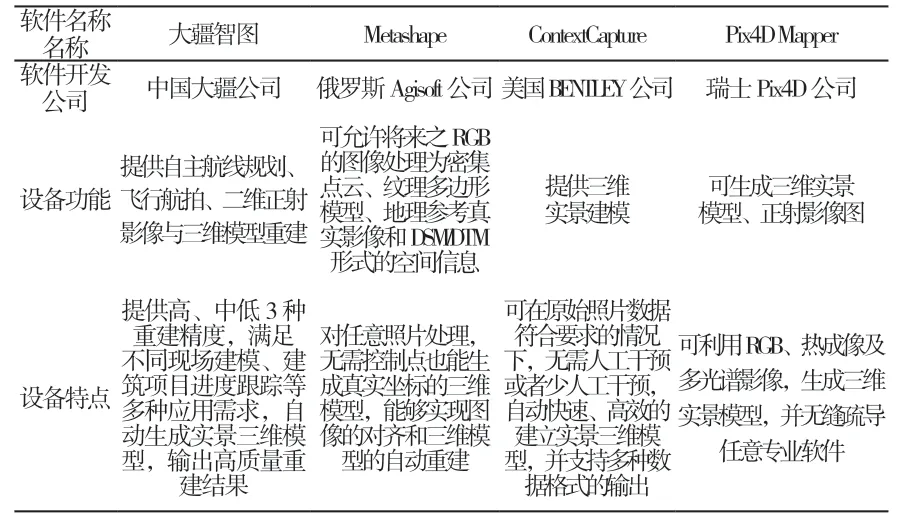
表3 无人机倾斜摄影技术三维建模软件对比
基于4 种不同软件建立的三维模型,对各个模型中具体地物(门窗、建筑物墙体等)的尺寸(长度、宽度)等数据与实际测量数据进行对比,以中误差值作为衡量模型精细化程度的评估指标,精度统计分析结果如图4所示。从图4 中可以看出,不同建模软件得到的建模精度呈现完全不同的变化规律,大疆智图软件建模的误差范围为-0.07~0.08,其中误差值大于0.02 的误差频数均大于30,因此建模精度较低;Metashape 软件建模的误差范围为-0.06~0.07,误差值介于±0.03 的误差频数均较低,因此建模精度较低;ContextCapture软件建模的误差范围为±0.08,其中误差频数主要集中于±0.05,因此建模精度较高;Pix4D Mapper 软件建模的误差范围为±0.06,除误差值为0.03 与0.04 的误差频数较高外,其余误差频数均较低,因此建模精度较低。综合比较中值误差分布情况可知,ContextCapture软件具有较高的建模精度,在无人机建筑物精细化建模中可优先选用。
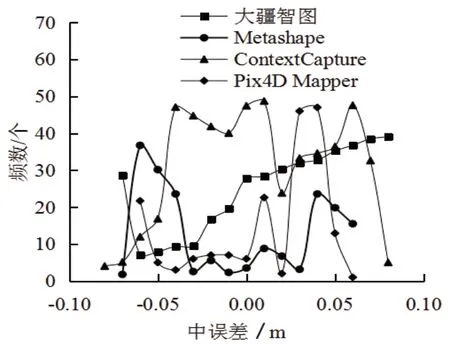
图4 不同建模软件的建模精度对比
4 结语
以山东省烟台市某城市街道建筑物为研究对象,基于无人机倾斜摄影技术,运用现场实测的方法获取目标建筑物的影像数据,并通过后期图片处理技术自动化和智能化地构建高分辨率的三维数据模型,研究4 种不同建模软件的精度变化,得到如下结论:
(1)选用的大疆Mavic2 Pro 四旋翼无人机搭载高精度高分辨力倾斜摄影摄像机作为数据采集设备,具有有起降方便、速度可调、安全稳定、高分辨力和控制灵活等特点,能够满足高效的建筑物三维建模的外业工作要求,适合大面积城市场景倾斜摄影数据的获取。
(2)4 种不同建模软件得到的建模精度呈现完全不同的变化规律,大疆智图软件建模的误差范围为-0.07~0.08,Metashape 软件建模的误差范围为-0.06~0.07,ContextCapture软件建模的误差范围为±0.08,Pix4D Mapper软件建模的误差范围为±0.06,综合比较中值误差分布情况可知,ContextCapture 软件具有较高的建模精度,在无人机建筑物精细化建模中可优先选用。
猜你喜欢
北京测绘(2023年1期)2023-02-23 13:25:10
汽车观察(2022年12期)2023-01-17 02:19:38
铁道建筑技术(2021年4期)2021-07-21 05:33:36
计算机应用文摘(2021年20期)2021-05-30 18:27:46
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:18
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
小天使·二年级语数英综合(2015年12期)2015-12-04 16:36:12
现代防御技术(2014年6期)2014-02-28 18:26:29