
柔性光栅间距视觉测量及光驱动柔性光栅栅距标定
2023-12-22 13:33张周强
无线互联科技 2023年19期
李 炼,张周强
(西安工程大学 机电工程学院,陕西 西安 710600)
0 引言
近年来,人们越来越关注周围环境和自身健康问题,工业废气的排放对生态造成了严重威胁。本文是工业废气光谱检测的前端测量系统。光栅是光谱学物质领域中常用的光谱元件,可分为机械光栅和柔性光栅。传统机械光栅间距是固定的,系统固定后透过光栅衍射光的波长也是固定的,而物质的吸收光谱具有一定宽度[1-2]。为实现光声光谱检测的普适性和准确性[3-5],本实验选用柔性光栅作为系统的分光元件。通过用激光照射柔性光栅的驱动部分,改变光栅的伸长量,使光栅间距连续变化,从而可以连续改变光屏某一固定点的光的波长,该波长范围内的光被待测物质选择性吸收。标定变化的光栅间距可以更好地了解物质吸收光谱的范围,并对吸收光谱进行处理,从而分析得到被测物质的信息。该检测系统不仅可用于检测工业废气,还可广泛应用于食品安全等相关物质检测领域。
光栅间距的测量方法主要分为机械接触探针法[6-7]、光学聚焦探针法[8-9]、扫描电子显微镜[10-12]、扫描探针显微镜[13-16]、衍射法[17-20]和干涉法[21-23]。本文使用的分光元件为柔性光栅,在外界激励下会发生弹性变形,因此接触式测量方法会影响测量精度。光学聚焦探针法的系统结构复杂,在测量过程中由于环境噪声的影响,增加了测量的不确定性。扫描显微镜是对物体进行表面重建,对栅距变化的光栅测量效率低下。干涉法需要分析干涉条纹图的相位,易受环境光影响,对于形状突变的结构测量误差较大。衍射法可以在宏观尺度上通过衍射图样测量微观尺寸,具有很强的抗环境干扰能力。可以无损实现光栅间距的高精度动态测量。
Chernoff等[15]使用分束器分离衍射光束,并构建角度测量系统来测量激光衍射角,从而计算光栅间距。但分束器反射光束影响测量结果,且系统结构复杂,测量光栅的间距固定,单次测量时间长。Du等[18]要求高精度直线转台和高精度光束轮廓仪测量光斑位置,价格昂贵,检测对象为机械光栅。在Ye等[19]的研究中,物体的位移信息是通过解调反射的衍射光斑信息得到的,测量精度可以达到几十μm。但解调复杂,光栅间距变化时需要重新解调光斑,对柔性光栅适应性差。Wu等[20]长程轮廓仪系统(LTP)造价昂贵,测试环境要求苛刻。Lue等[24]采用光学测角元件测量激光衍射角然后计算光栅间距,对实验平台和仪器精度要求高,动态检测能力差。本文根据光栅衍射原理,利用激光器、柔性光栅、光屏、CCD相机和计算机建立了光栅间距测量和标定系统。激光照射柔性光栅并在光屏上呈现衍射光斑。CCD相机采集光斑,计算机对采集的图像进行分析。然后用808 nm激光驱动柔性光栅,改变光栅周期,分析数据,完成标定。通过对误差数据的分析,该系统能够可靠地标定光栅间距。
1 测量系统搭建与光栅仿真分析
柔性光栅标定系统分为光源模块、光栅模块、图像采集模块和图像处理模块。来自激光源的光照射到柔性光栅上,经过柔性光栅处理后,在光屏上得到不同能级的光斑。利用CCD相机获取光斑图像,利用LabVIEW软件对图像进行分析计算,从而获得光栅间距。利用808 nm驱动激光照射柔性光栅驱动部分,屏幕上不同能级的光斑会随着驱动激光的照射而不断改变在屏幕上的位置。通过LabVIEW软件控制CCD相机进行实时采集和分析,得到光栅间距的变化规律,从而完成光栅标定。系统结构如图1所示。

图1 系统结构
1.1 柔性光栅设计
1.1.1 光栅理论
柔性光栅在不同的外部激励下,在光屏某一固定点处可得到不同波长的光或使固定波长的光在光屏上偏移。光栅结构如图2所示。

图2 光栅结构
柔性光栅的中间区域为栅线区域,两侧为驱动区域。光栅区域透明部分的宽度为a,不透明部分的宽度为b,光栅常数是d(d=光栅间距)。光透过光栅在光屏上得到明暗相间的衍射条纹,条纹间距可用光栅方程(1)得到。
d(sinθ±sinα)=kλ(k=0,±1,±2…)
(1)
公式(1)中:θ是衍射角;α是入射角;k是衍射级;λ是入射波长。在已知衍射级k、入射波长λ、入射角α(光栅垂直于激光所成的锐角)、光栅到光屏的距离L以及k级衍射光斑到零级光斑的距离H的情况下,就可以得到光栅周期。激光衍射示意如图3所示。
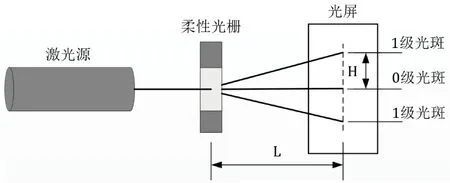
图3 激光衍射
1.1.2 光栅驱动仿真

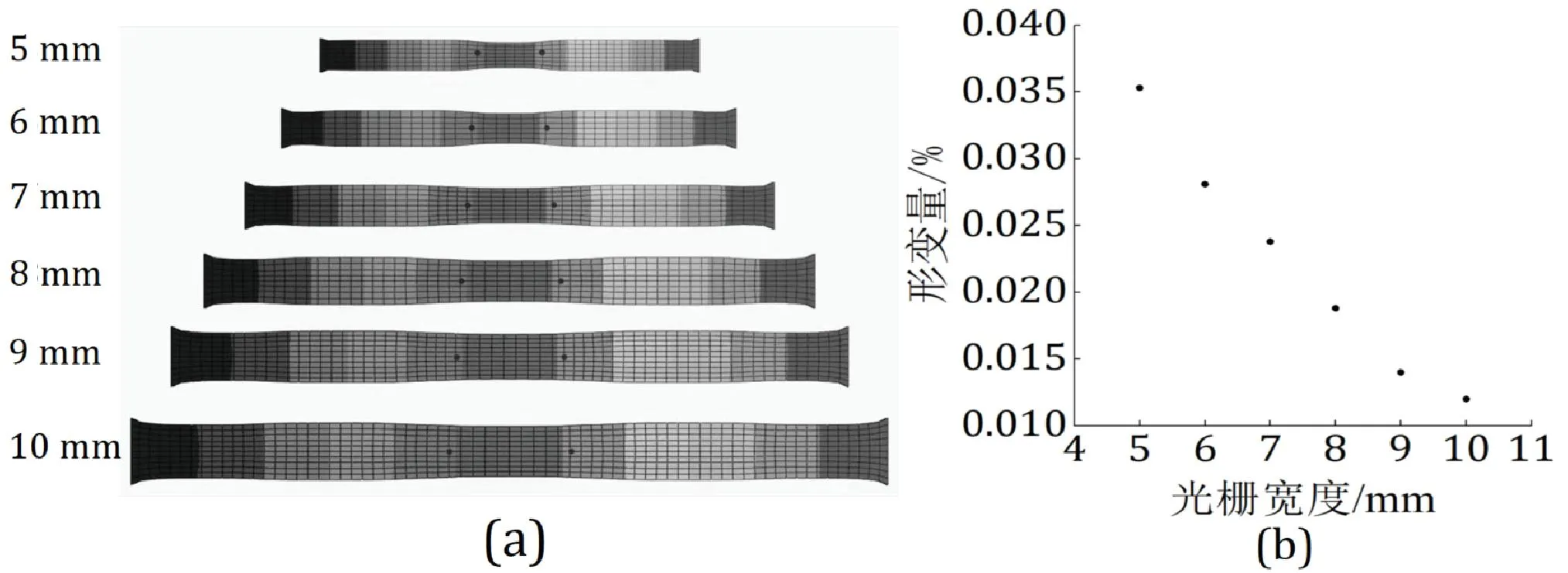
图4 光栅仿真
在预拉伸50%的情况下,对光栅驱动区域两侧施加热源,光栅区域的长度收缩。光栅区域在长度方向上的变形为3.5%,大于理论要求的2.6%,满足一氧化碳特征光谱所需的变化范围
1.1.3 柔性光栅制备
柔性光栅分为栅线区和驱动区。将聚二甲基硅氧烷(PDMS)与固化剂按一定比例混合,使用离心机去除气泡,然后涂抹到掩膜板栅线区域,复制栅线得到光栅栅线区域。将石墨烯/聚二甲基硅氧烷(GNP/PDMS)与固化剂按一定比例混合,涂覆在平行于栅线15 mm范围内的栅线区外侧,形成光栅驱动区域。制备流程如图5所示。
对于我国中央银行体制的改革,为了提高中央银行业务的内在效率,减少不必要的监管与服务成本,应坚持金融调控,金融服务与金融监管的统一。为了中央银行货币政策的执行,中央银行的金融监管职能要进一步强化,加强对金融业务的监管以及法规的实行,确保金融市场的稳定。商业银行应严格贯彻落实央行制定的金融监管规定,遵守职业道德,维护金融秩序。在出台货币政策时,我国央行并没有独立的发言权,中国人民银行应该更加的开放、灵活。在风险管理方面,建立新型的监管模式,为央行的监管塑造良好的环境。总而言之,我国需要提高中央银行的独立性,避免地方政府的干预,加强金融监管的力度。
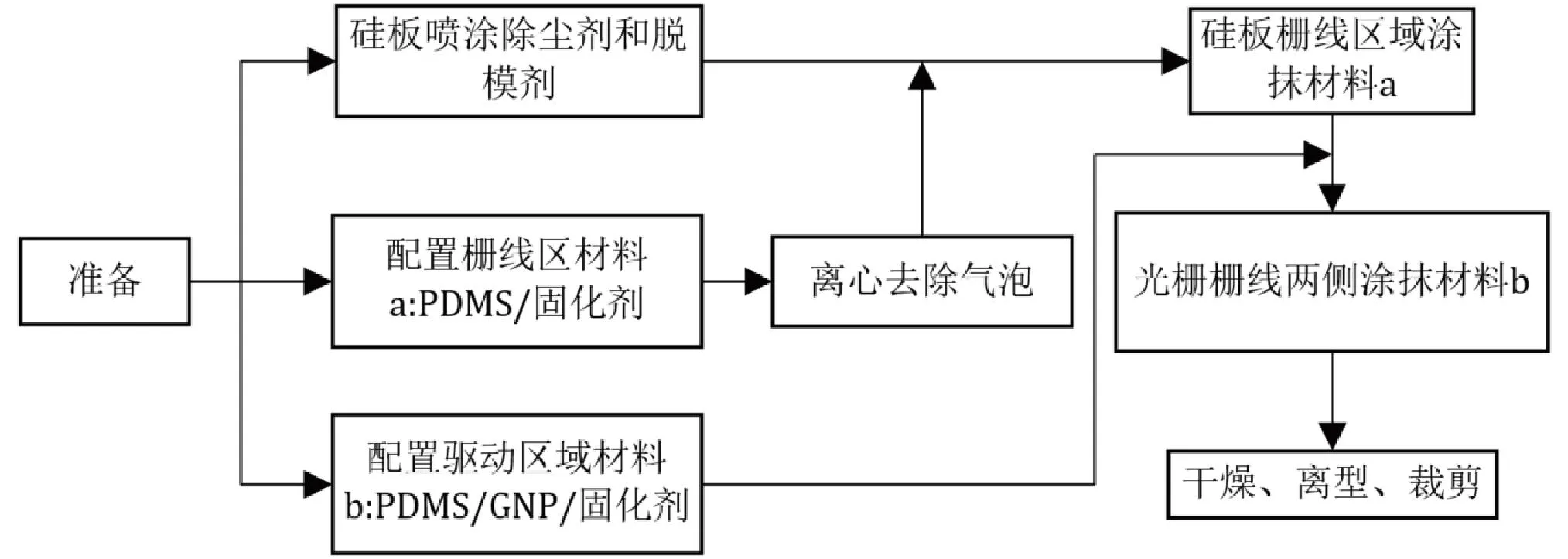
图5 柔性光栅制备流程
光栅结构示意和成品如图6所示。
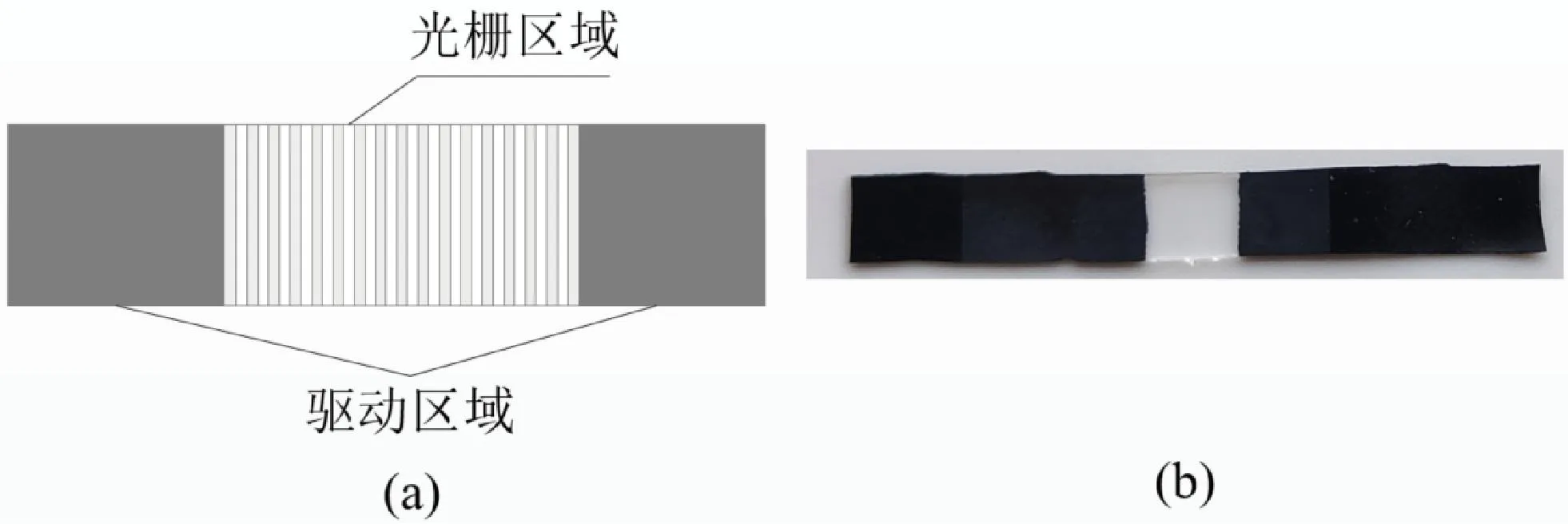
图6 柔性光栅
2 栅距测量理论
本文设计了一个二维圆形阵列板作为标定板,相邻圆心间距为40 mm,单个圆的半径为10 mm。图像处理流程如图7所示。
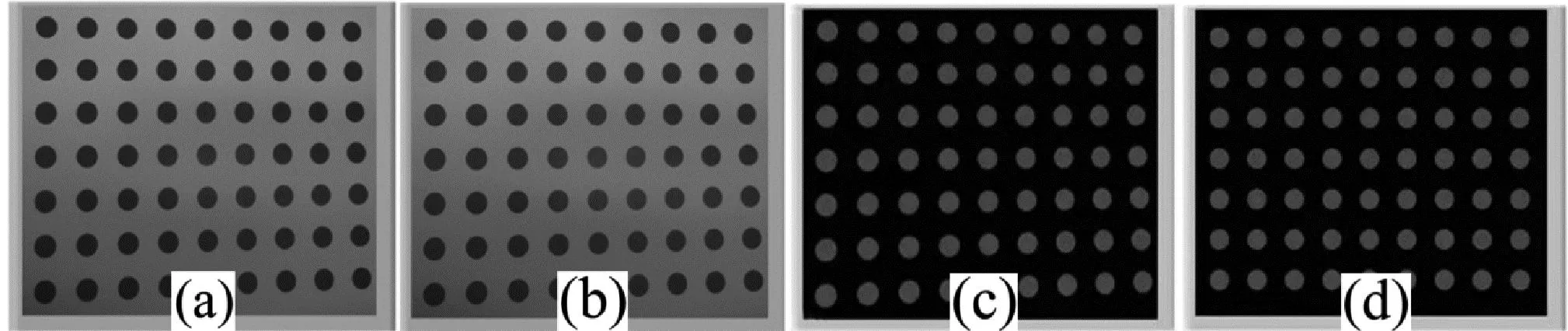
图7 图像处理流程
(1)图像采集:图7(a)为CCD相机通过Grap模式获取的实验原始图像。
(2)灰度化处理:Grap模式保存的图像是‘.png’格式的彩色图像,为了提高后续处理速度对图像进行灰度处理,如图7(b)所示。
(3)二值化:利用阈值分割法将标定样本上的圆形标志点从背景中分离出来。如图8所示为原始图像的灰度线性直方图,根据该直方图确定二值化的阈值范围,二值化处理后的图像如图7(c)所示。
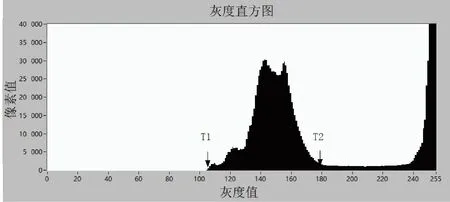
图8 灰度直方图
(4)滤波处理:采取低通中值滤波,将3×3结构元素内的像素灰度从小到大排序,从序列中选取中间值作为中心像素的新值,这样多次腐蚀就可以滤除图像中的小颗粒杂质。
(5)畸变处理:相机垂直于标定板安装,获取标定板图案。实际过程中照相机不能完全垂直于校准板,会引入透视畸变。相机镜头特性会导致系统产生径向畸变。图7(d)是畸变处理后的标定板校准图。
(6)质心计算:标记滤波图像粒子,提取粒子的轮廓,转换成蒙版,将蒙版的各像素看成质量相同的质点,得到质心坐标。
(2)
(7)校准信息设置:假定相邻像素值之间的实际距离为N,根据式(3)可得出标定样板相邻圆心之间假定值L,设M为标定板相邻两圆心的实际值。由a=N/M校准相邻像素之间的实际值P。
(3)
(8)光栅周期测量:打开激光光源,激光通过柔性光栅在光幕上得到0级光斑和1级光斑。按上诉方法得到0级和1级光斑的质心间距。通过公式(4)计算光栅周期,即得到光栅间距。
(4)
3 标定实验分析
3.1 光栅间距测量
在防震平台上搭建光栅间距测量系统,包括激光源、柔性光栅、光屏、CCD相机、补光光源和计算机,如图9所示。

图9 实验平台
CCD相机采集标定板图样发送给计算机。计算机对标定样图进行镜头畸变(横向畸变、切向畸变)和透视畸变处理。将标定板圆点圆心间隔数据给到程序,建立像素坐标与现实世界坐标关系。保持激光源、柔性光栅、镜头和光屏位置不变。将光屏上的标定样板更换成白板。关闭补充光源,打开实验激光器。激光通过柔性光栅在光屏上显示衍射光斑,此时柔性光栅处于自由伸长状态。收集的衍射图如图10(a)所示。
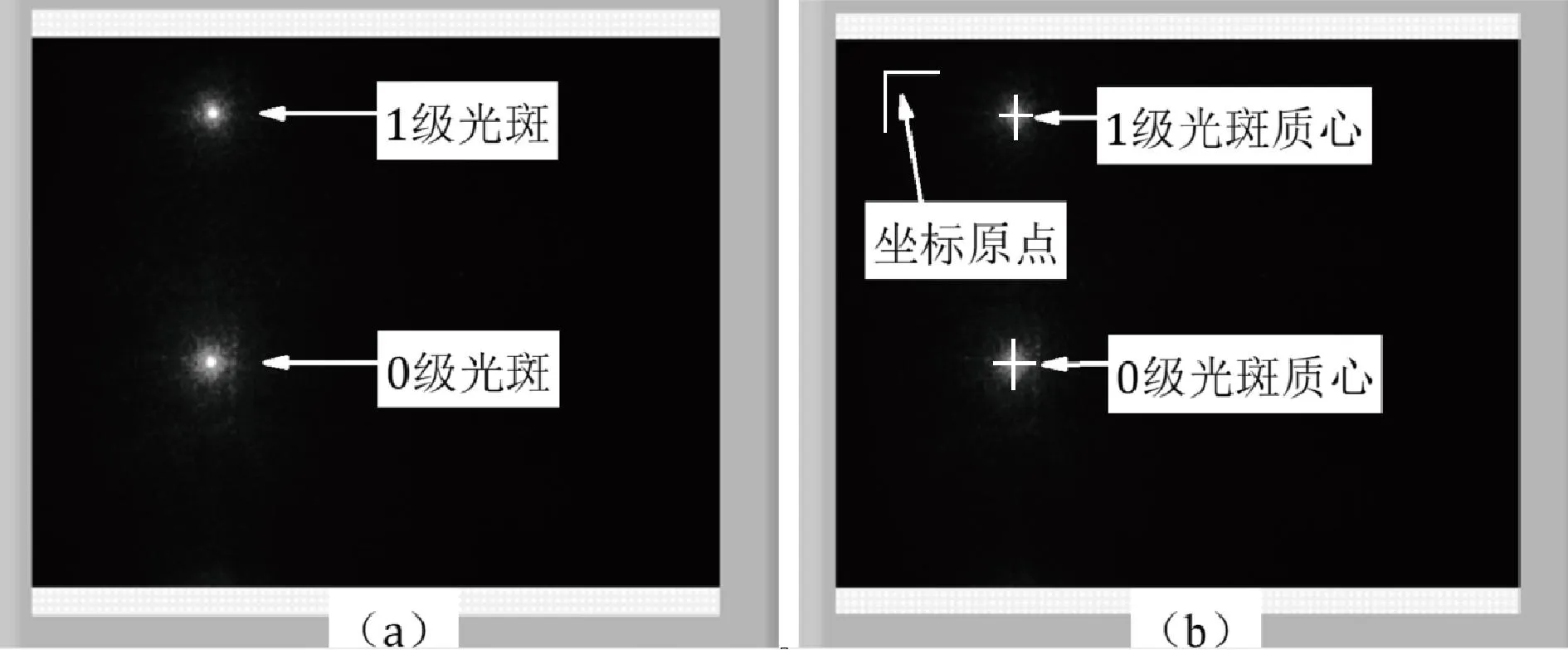
图10 衍射光斑
对衍射图像处理得到0极光斑质心和1极光斑质心如图10(b)所示。建立像素坐标的原点,通过像素坐标与真实世界坐标关系,确定0极点质心坐标X0:36.47 mm和Y0:10.95 mm。1级点质心坐标X1:36.76 mm,Y1:74.90 mm。光栅到光屏距离测量为250 mm,光源为650 nm的激光光源。根据公式(4)计算得到自由状态下的柔性光栅常数d=2.623 μm。
3.2 误差分析
本实验使用的柔性光栅常数范围在2~3μm,光栅与衍射板的距离为250 mm,使用的激光为650 nm红色激光,0级点光斑与1级点光斑间隔范围在60~80 mm。在光屏位置安装误差分析板,误差分析板如图11(b)所示。可以通过测量分析板的间隔来获得测量误差。

图11 误差分析板
各点位置及间隔如图11(a)所示。图中虚线为距离注释线。分别测量标准间隔为60 mm、70 mm、80 mm圆斑距离,共测量3张图片,每种间隔可得到18组数据,处理得到误差点线如图12所示。
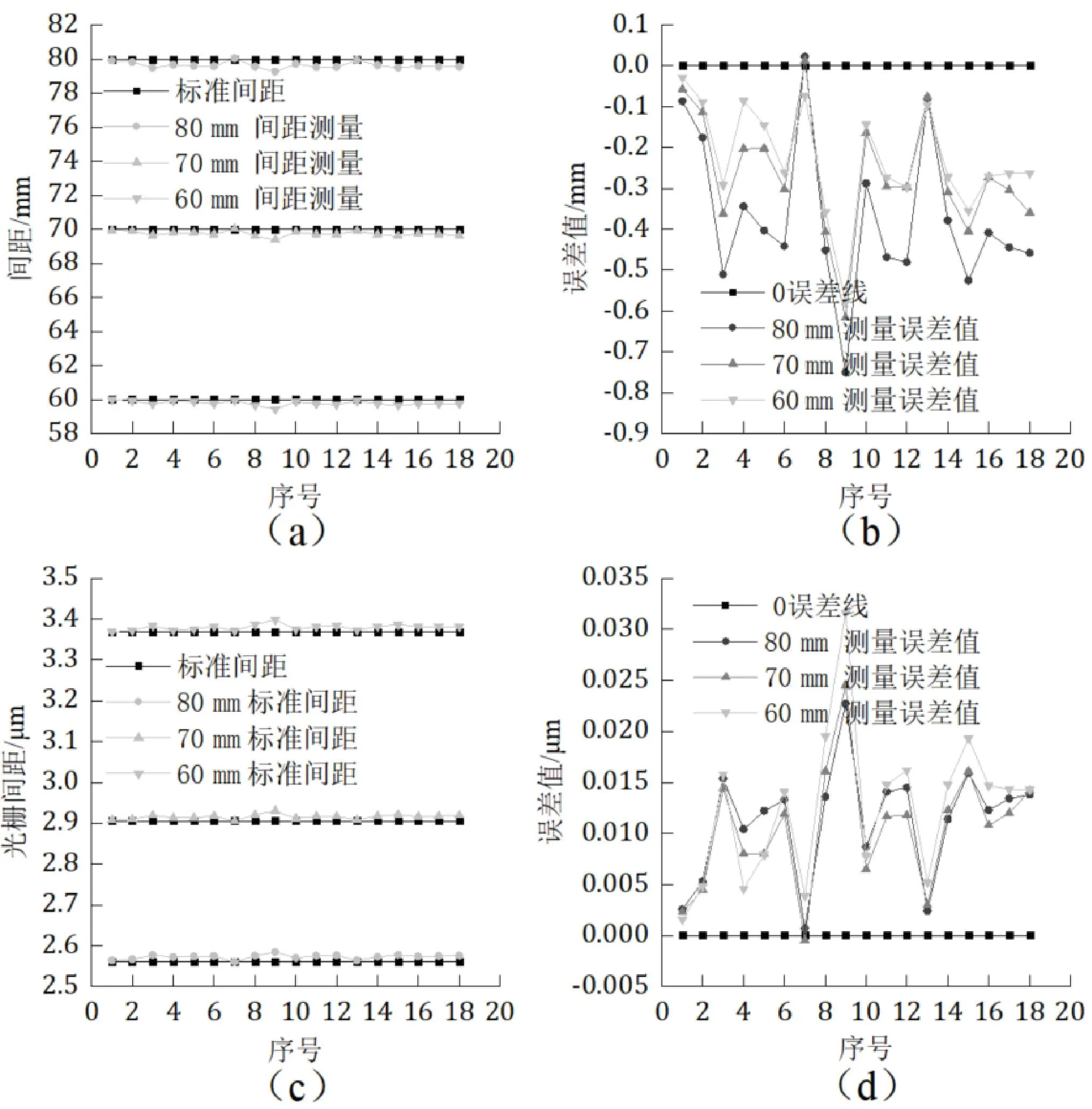
图12 误差分析
对标定板上60 mm标准间隔点的测量分析知,圆点间距测量误差小于0.58 mm,将圆点间距代替衍射光斑距离H代入公式(4),光栅间距误差在0.032μm 以内。对70 mm标准间距圆点测量,圆点间距测量误差小于0.62 mm,光栅间距误差在0.025μm 以内。对80 mm标准间距圆点测量,圆点间距测量误差小于0.76 mm,光栅间距误差在0.023μm 以内。
通过上诉对误差分析板的分析可知,搭建的光栅间距测量系统栅距测距误差小于0.032μm,测量精度在8‰以内。
3.3 光驱动柔性光栅栅距标定
在栅距测量系统中使用2个808 nm激光驱动光栅,每隔5 s采样一次衍射图像,直到衍射图像趋于稳定状态。对采集的图像进行处理和分析,得到不同时刻下柔性光栅栅距值,建立时间-栅距关系,如图13所示。

图13 时间-栅距
方程拟合优度R2=0.996。从图中可以看出,在90 s的加热过程中,光栅常数的变化达到0.179 μm,大于一氧化碳特征光谱变化范围0.103 μm。
3.4 光驱动稳定性分析
利用红外温度传感器及其控制面板检测光栅驱动区域的温度,如图14所示。检测系统如图14(a)所示,检测区域如图14(b)所示。

图14 温度检测
在808 nm激光驱动下各检测点升温曲线如图15所示。

图15 光驱动光栅温度变化
分别对检测点1、2、3和4重复3次测量温度变化,从图15可知,升温变化重复性好,稳定温度恒定。
4 结语
本文研究了基于机器视觉的柔性光栅栅距标定方法,通过激光驱动光栅实现栅距连续变化,为光谱物质检测提供支持。根据衍射原理,获得包含光栅栅距信息的衍射光斑,通过LabVIEW对图像进行处理得到栅距。通过对误差分析板测量分析,得到栅距测量误差小于0.032 μm,精度范围可控制在8‰以内。该系统对环境要求低,测量稳定性好,精度高。采用808 nm激光驱动光栅,通过测量的温度分析,光驱动稳定,且光驱动光栅栅距变化范围超过被测物质特征光谱所需变化范围,通过时间-栅距关系标定柔性光栅,提高了物质检测的实时性。根据检测物质光谱带的不同,可换用不同栅距范围的柔性光栅进行物质成分和含量的检验,应用前景好、适应性广。
猜你喜欢
都市(2023年6期)2023-12-28
诗歌月刊(2023年1期)2023-03-22
学校教育研究(2022年9期)2022-04-18
阅读(高年级)(2019年9期)2019-11-15
高师理科学刊(2016年8期)2016-06-15
初中生天地(2016年32期)2016-03-22
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
物理与工程(2014年4期)2014-02-27
物理与工程(2011年1期)2011-03-25
物理通报(2011年12期)2011-01-25
