计及继电保护需求的柔直换流器故障分量阻抗重构控制策略
2023-12-11 10:01:52吴林平王小红马炜程
电力系统自动化 2023年22期
吴林平,王小红,闫 冬,马炜程,邹 宁,余 洪
(1.南瑞集团有限公司(国网电力科学研究院有限公司),江苏省南京市 211106;2.国电南瑞科技股份有限公司,江苏省南京市 211106;3.国电南瑞南京控制系统有限公司,江苏省南京市 211106)
0 引言
随着国家“双碳”目标的持续推动,电力系统中光伏、风电接入比例逐年升高,当前正在朝着高比例新能源、高比例电力电子设备的新型电力系统模态不断迈进。电力电子设备,尤其是电压源型电力电子设备的固有特性对现有电力系统的稳定运行和继电保护都产生了显著的影响。文献[1-2]针对全功率型新能源场站的距离保护适应性问题进行了深入分析。文献[3]在提出当前常用的海上风电场柔性直流换流器(以下简称“柔直换流器”)故障穿越策略的同时,也指出了该策略对保护元件的不利影响。文献[4-7]分别分析了光伏、风电等场景下电力电子设备阻抗特性对方向元件、距离元件、选相元件等传统保护原理有效性的负面影响;而文献[7-9]则基于电压源逆变器的共性详细分析了单设备并网及多源馈入情况下方向元件失效的原因。文献[10]提出一种考虑频率耦合和汇集网络的风电场序阻抗模型等值方法,建立了风电场与单个逆变器及风电机组的统一模型;文献[11]提出故障时双馈风机电源正、负序阻抗差别较大,由此导致风电场侧各序电流分配系数也存在很大差异,严重影响相间电流突变量选相和对称分量选相的有效性。现有保护元件及其故障辨识原理通常适用于以同步机、变压器等电力设备为主的常规电力系统,其故障辨识能力在含有高比例电力电子设备的新型电力系统中有所减弱。因此,有必要研究相应控制策略,利用电力电子设备的控制灵活性,提升现有保护元件在新型电力系统中的故障辨识能力。
针对此类问题,从继电保护原理出发,文献[12-14]指出现有的继电保护辨识方法无法正确识别含新能源接入的新型电力系统故障类型,提出可以准确辨识任意故障类型的保护原理;从电力电子设备控制策略出发,文献[15-16]提出了序阻抗角控制策略,但是所提策略适用于光伏、储能等功率潮流完全可控的场景,并未考虑输电场景下有功平衡问题。文献[17]通过设计控制策略实现传统序分量选相元件对逆变器交流故障的有效辨识,但是所提方法的前提是利用额外的判断逻辑进行故障识别,其可靠性有限。文献[18]分析了柔性直流换流站采用典型控制策略下交流汇集线路发生不对称故障时的故障特征及电流差动保护适应性,指出换流站采取负序电流注入的控制策略时,电流差动保护可靠性与负序电流参考值大小密切相关,但主要计及差动保护动作性能进行负序电流参考值的设计选取,面向多种工频量保护动作性能提升方法还需深入研究。
本文从电压源型换流器(VSC)通用的基本控制策略出发,以新能源汇集经柔性直流线路送出的受端换流器为研究对象,分析方向保护元件和选相元件适应性的问题,进而设计附加控制策略,使换流器在交流故障期间表现出虚拟的故障分量阻抗相位特性。基于此核心思想,分别提出虚拟负序阻抗控制和正序故障分量相位控制策略,并提出一种应对系统正序电压跳变的补偿方法,然后提出综合两种策略的整体方法。由于VSC 控制环节具有共性,该策略可推广至其他应用场合。通过实时数字仿真系统(RTDS)搭建柔性直流线路仿真模型,验证所提策略对方向和选相两种典型元件的有效支撑。
1 典型保护元件的适应性分析
1.1 VSC 基本控制策略
直流侧以电容为主要储能元件的VSC 存在两电平、三电平、模块化级联等多种拓扑结构,在风电、光伏、储能和柔性直流输电等应用场景中均得以广泛应用。不同拓扑的VSC 由于工作原理的差异,其最终开关信号调制方式和附加控制策略不尽相同,本文关注新能源及柔性直流等实际场景中换流器控制结构的共性部分,即通常采用的电流正负序双闭环控制结构。
依据不同的工作场景及工作模式要求,换流器控制外环形式多样,例如,定直流电压、定有功/无功功率、V-f控制、虚拟同步机等[19]。为保证设备安全,提升设备对外部扰动尤其是交流故障期间的动态响应和故障穿越性能,换流器内环通常采用同步旋转坐标系下正负序电流分离控制。根据交流故障期间不同控制目标,换流器通用电流内环参考值如式(1)[20]所示。
式中:U和I分别表示换流器交流侧相电压和相电流的有效值;上标+、-分别表示正序、负序分量;下标d、q分别表示同步旋转坐标系下d轴和q轴分量;下标ref 表示参考值;Pref和Qref分别为有功和无功功率参考值,由控制外环依据换流器功能给定,不限于以定输出功率为控制目标。除柔性直流受端换流器以外,诸多场景下换流器控制系统均具备以上共性,即考虑电流内环后,VSC 可等效为参考值由外环给定的“可控电流源”。
1.2 序分量方向保护元件
交流线路保护中,序分量方向保护元件利用电压和电流正、负、零序故障分量的相位关系判别故障发生的方向,由于常规系统中线路阻抗和同步机系统阻抗的相角大多位于75°~90°之间,当保护元件安装处正方向发生故障时,正、负、零序电压和电流故障分量相位满足如下关系:
当方向保护元件用于换流器交流连接线路时,换流器电流控制特性与常规同步机的明显差异对保护元件有效性存在不利影响,以A 相金属性接地故障为例,假设故障前换流器功率因数为1,故障前后有功功率指令不变。结合式(1)分析的结果如表1所示。

表1 序分量方向保护元件测量结果理论值Table 1 Theoretical value of measurement result of sequence-component-based direction protection element
对于三线制换流器,零序分量由联结变压器接地方式决定,与控制策略无关。由表1 分析可知,以抑制功率波动为目标时,电流故障分量相位由功率指令决定,因而方向元件测量结果受故障期间功率指令影响,在有些情况下可能接近或越过故障方向判定边界,导致元件误动或拒动。若再引入过渡电阻、换流器电流限幅等因素,则以上影响效果将更为复杂。除此之外,当以抑制负序电流为目标时,负序方向元件无法获得有效序分量,元件失效。
1.3 序分量选相元件
工程中常选用序分量选相元件配合距离/过流保护实现对故障的判别。序分量选相元件通过比较正、负、零序电流故障分量的相位关系以判定故障类型和故障相,以单相接地故障为例,其判据为:
结合式(5)所示判据和表1 分析结果分析可知,由于换流器不同于常规同步机的相位特性,选相元件的测量结果受换流器控制策略及工况影响。尤其当采用抑制负序电流为控制目标时,序分量选相元件完全失效。
综上所述,为解决典型保护元件的适应性问题,在不改变保护原理的前提下,需要在换流器抑制负序电流的基本控制的基础上,设计合适的附加控制算法。方向保护和选相元件保护原理都基于常规电网下故障分量网络的阻抗特性,而VSC 由于其电流控制特点,实质上并不存在与故障分量阻抗直接对应的固定外特性,从而给保护元件的故障辨识带来不利影响。因此,所设计的控制策略应当使换流器在故障期间的各序故障分量阻抗特性与常规同步机相似,从而满足保护元件的故障辨识需求。
2 虚拟负序阻抗控制
2.1 虚拟负序阻抗控制原理
忽略换流器内部拓扑结构,采用抑制负序电流控制策略,逆变方向为电流正方向,换流器在负序旋转坐标系下的动态方程为:
为模拟常规同步机的负序特性,换流器负序网络应当表现为电压源-串联阻抗的形式。因此,利用换流器对负序电流的可控性,可以引入虚拟负序阻抗概念,如图1 所示,其中,I-为负序电流,U-为并网点负序电压,E-为虚拟负序内电势,Zv为虚拟负序阻抗。虚拟负序阻抗与滤波电路阻抗共同组成换流器新的等效负序阻抗。
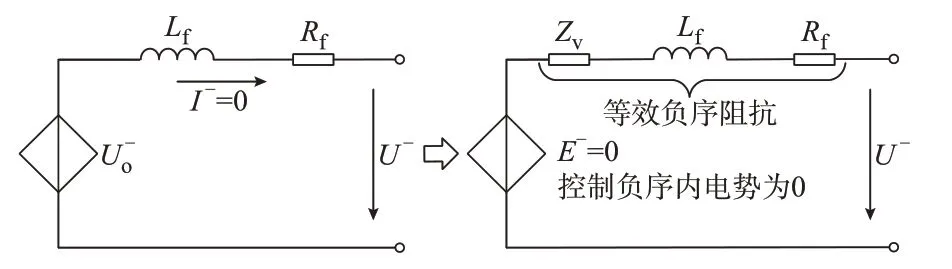
图1 引入虚拟负序阻抗后的换流器等效负序网络Fig.1 Equivalent negative sequence network of converter with a virtual negative-sequence impedance
对图1 等效电路列写动态方程,取稳态后的情况,则有:
式中:Lv和Rv分别为虚拟电感和电阻。
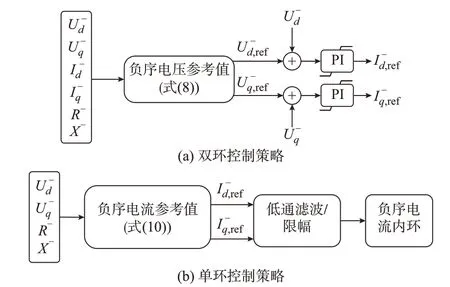
图2 虚拟负序阻抗控制框图Fig.2 Block diagram of virtual negative-sequence impedance control
2.1.1 双环控制策略
以网侧负序电压为外环控制目标,可以得到负序电压参考值:
则负序电流参考值可由电压控制环得到:
式中:Kp和Ki分别为比例-积分(PI)环节比例和积分系数。
2.1.2 单环控制策略
对于受端柔直换流器,通常情况下网侧电压由大系统决定,换流器输出负序电流对系统负序电压的影响非常小。因此,上述双环控制策略中以负序电压参考值为控制目标的方式的适用性有所欠缺。同时,双环控制在结构上和参数调整上均较为复杂,可能对换流器原有动态性能造成不利影响。
在此条件下,负序电流参考值可以不经过PI 环节的修正,直接由实测系统负序电压计算得到,计算方法为:
式 中:R=Rv+Rf;X=ω(Lv+Lf)。由 此 可 以 根据设定的总负序阻抗得到负序电流参考值。
相比于换流器电流内环响应速度,系统电压暂态过程很短,因此,相比于双环控制,单环控制策略输出的负序电流参考值的暂态过程更短暂,且无须考虑内外环控制参数的配合问题。
2.2 虚拟负序阻抗参数的选取
虚拟负序阻抗参数分为相角和幅值两方面,其需要满足的约束条件为:
式中:Z-为负序阻抗;φsys为系统相角;I为换流器最大允许负序电流。
为模拟常规同步机特性,虚拟阻抗相角应设定为系统相角。虚拟阻抗幅值受换流器最大负序电流限制,可采取两种方法:1)按最恶劣情况计算固定的阻抗幅值;2)根据最大允许负序电流动态改变阻抗幅值。
按方法1)设定,即根据系统最大负序电压(相间金属性短路情况,取1/2 额定电压)和最大允许负序电流得到固定的阻抗值:
式中:Urate为系统额定电压。最大允许负序电流应该保证在任何情况下总电流不超过设备容量限制。一般换流器设备会具备1.2 倍额定容量过载能力,考虑边界情况下,设备在正常时满负荷运行,则最大负序电流幅值可定为0.2 p.u.。
按方法2)设定,则需要根据电流约束条件计算阻抗幅值:
在故障期间换流器输出的负序电流始终维持在保护元件负序电流需求值。等效负序阻抗随故障类型、故障程度动态变化。该方法可以保证保护元件总是可以检测到足够的负序电流,避免采样精度和噪声的影响。
综上,对于本文研究对象,采用单环控制,按最大负序电流幅值计算负序阻抗幅值,设计负序阻抗控制算法整体结构如图3 所示。在其他应用场景下,根据换流器特性和保护元件需求,则应选取合适的控制策略和阻抗参数计算方法组合。

图3 采用单环控制的虚拟负序阻抗控制整体结构Fig.3 Overall structure of virtual negative-sequence impedance control using single loop control
从另一角度看,图3 所示方案在故障期间电压恒定时,亦可视为负序电流定幅值/定相位控制。对负序电压进行变换,则有:
比较式(14)与式(10)、式(13),可见两种方式在计算上等价,虚拟负序阻抗实质上可以视为对负序电压矩阵变换的另一种表达形式。
3 正序故障分量相位控制
3.1 正序故障分量相位控制基本思想
交流故障期间,换流器等效正序阻抗受功率指令、控制策略和电流限值的影响,相比于常规同步机,具有阻抗幅值较大、阻抗相角不固定的特征,对现有交流保护元件的故障辨识带来不利影响。换流器弱馈特性决定其很难实现与常规电网类似的阻抗幅值。但是,对于利用正序故障分量进行故障判别的保护元件,换流器可以在自身容量允许范围内对正序电流的变化量进行合理控制,使得换流器在故障分量网络下表现出的阻抗相位特性与常规同步机相似,有利于保护元件的故障辨识。
以新能源送出场景受端换流器为研究对象,常规电网和换流器并网对应的正序故障分量网络如图4 所示。
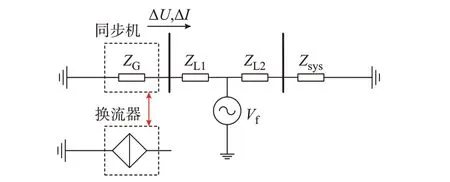
图4 同步机与换流器并网情况下的正序故障分量网络Fig.4 Positive sequence fault component network when synchronous machine and converter are connected with power grid
图4 中ZL1、ZL2、Zsys分 别 为 故 障 点 两 侧 的 线 路阻抗和系统等效阻抗,不同于同步机,换流器在故障分量网络中等效为可控电流源。柔性直流受端换流器通常采用定直流电压控制外环,注入电网的有功功率由送端决定,在受端交流故障时若迅速改变换流器有功功率输出,送端功率调节不及时则可能造成直流线路过电压等问题。因此,本文中考虑换流器在故障前后正序有功功率不变,则正序有功电流分量由换流器直流电压外环决定,所设计的附加策略仅对正序无功电流分量进行控制。
忽略电流限制,故障发生后,交流电网正序电压U˙+跌落为原来的k倍(0 <k<1),则正序电流I˙+保持与电压同相,幅值上升为原来的1/k,为了使换流器在故障分量网络下的等效正序阻抗相位φm与同步机类似,在同步坐标系下,输出正序无功电流变化量ΔI+q应满足:
从上述分析可以得到一个较为直观的结论,即故障期间换流器向系统注入一定的容性无功电流即可使正序故障分量阻抗角接近系统相角。从这一方面看,按国家标准[21-22]相关规定的故障期间无功支撑功能可对保护元件进行一定程度的辅助。但是,当考虑系统正序电压相位跳变的影响后,固定功率或随电压跌落程度线性变化的容性无功支撑不足以完全满足保护元件故障辨识的需求。
3.2 系统正序电压相位跳变的影响及其补偿方法
交流系统发生非金属性故障时,故障点处过渡电阻与系统相角的差异会引起故障点处正序电压相位跳变,且通常情况下故障后正序电压滞后于故障前电压,换流器的弱馈特性会使相位跳变更为明显。同时,换流器锁相环总是跟踪当前正序电压相位,相量关系见附录A 图A2。
设δ为故障后正序电压相位滞后的角度。仍然假设故障前后有功功率不变,此时正序故障分量阻抗角满足:
取不同电压相位跳变角,可得到换流器故障期间正序故障分量阻抗角与正序电压跌落程度和相位跳变的关系如图5 所示。
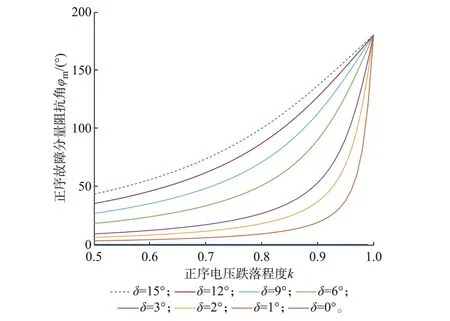
图5 换流器故障期间正序故障分量阻抗角与正序电压跌落程度和相位跳变角的关系Fig.5 Relationship between positive-sequence fault component impedance angle and drop degree and phase jump angle of positive-sequence voltage during converter fault
图5 中曲线表明,即使故障期间不注入无功电流,正序电压相位的跳变也会导致换流器正序故障分量阻抗角发生变化,接近甚至超过系统相角。进一步定性分析可知,为实现正序故障分量阻抗角与系统相角相等,换流器并不总是需要注入容性无功电流。
针对上述讨论进行定量分析,式(16)在临界条件时有φm=φsys,则此时正序电压相位跳变角δ与跌落程度满足:
则
式中:δth为临界条件时正序电压相位跳变角。
综合以上分析,对式(15)进行修正,以故障后正序电压相位作为旋转坐标系的基准,计算正序电压、电流故障分量:
令φm=φsys,可得:
式中:Iq为换流器需要注入系统的正序无功电流分量;Id为故障期间正序有功电流分量,由其他控制模式决定。
基于式(20)可以设计正序故障分量相位控制算法,其整体结构如图6 所示,其中U+和I+分别表示正序电压和电流,下标0 表示故障前电气量。电压/电流记忆模块记录故障前一周期的电气量信息,用于计算故障分量。故障检测逻辑用于控制记忆模块锁存信息的时机。电压相位检测模块中使用锁相环或傅里叶变换算法获取故障前后正序电压相位的变化角度。最终全部信号按式(20)计算换流器需要注入的正序无功电流参考值。需要注意的是,最终计算结果为理想值,不考虑换流器本身电流容量的限制,需要在算法中结合其他约束条件,对该理想值进行限幅。
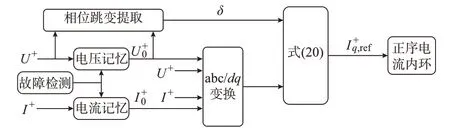
图6 换流器故障期间正序故障分量相位控制算法整体结构Fig.6 Overall structure of phase control algorithm of positive-sequence fault component during converter fault
4 支撑交流线路保护的复合控制策略
复合控制方法即是依据上述正负序控制算法,计算出正序无功电流、负序有功/无功电流的指令值,再根据设备容量、工况等条件进行约束。因此,关键问题是3 个电流指令的限幅。按以下原则设计:
1)电流参考值的相位控制目标是正负序故障分量阻抗相角均等于最灵敏角(一般为系统阻抗角)。
2)正序有功电流参考值不受本策略影响,具备最高优先级,保证该参考值后剩余的电流容量用于注入其他电流分量。
3)对称故障时,负序电流抑制为0。换流器剩余电流容量用来发出正序无功电流。
4)不对称故障时,优先保证负序电流幅值满足辨识要求,再将剩余电流容量用于产生正序无功电流。
5)若换流器总容量不足以满足所有电流指令需求,应保证相位控制结果尽量趋近于最灵敏角,且保证三相电流中幅值最大相的峰值为换流器最大允许电流。
换流器最大允许负序电流幅值计算方法为:
式中:Imax为换流器总电流最大值;为当前正序有功电流。
假设输出负序电流后换流器仍有剩余容量。正序无功电流参考值由式(20)计算后,限幅值计算方法为:
式中:Iax为正序无功电流最大值;I˙-为当前输出负序电流相量。基于上述原则可设计完整的复合控制策略,其整体流程见附录B 图B1。
5 仿真验证及性能分析
5.1 仿真模型网架结构
受限于硬件资源,为验证所提复合控制策略的性能,在不影响整体运行特性的前提下,对新能源汇集送出系统进行合理简化。搭建24 级10 kV/10 MW两端口柔性直流系统实时仿真模型。模型网架结构如 图7 所 示,其 中,ZL为 线 路 阻 抗,ZS为 系 统 阻 抗。场景中,送端换流器汇集送端系统有功功率后,以定功率模式运行。受端换流器以定直流电压模式运行。因此,假设故障前后受端换流器优先保证有功功率传输。

图7 柔性直流系统实时仿真模型Fig.7 Real-time simulation model of flexible DC system
图7 中附加控制策略应用于受端柔直换流器。由负序阻抗控制原理分析可知,若阻抗角设置为系统相角(一般小于90°),负序电流中将包含小部分有功分量。由于换流器有功平衡,此时正序有功功率将出现波动。对于本文研究场景,负序阻抗设为纯感性对方向及选相元件的故障辨识影响较小且对正序有功功率控制无影响。因此,虚拟负序阻抗角控制目标设置为90°,正序故障分量阻抗角控制目标为80°。保护元件测量点位于受端换流器隔离变压器系统侧,电流正方向定义为指向交流系统。在受端交流系统施加不同类型故障,分析故障过程中换流器等效阻抗特性。出于验证控制算法功能的角度,保证故障期间受端换流器具备足够剩余容量,可以完全满足所提控制策略的输出电流指令,对送端有功潮流进行设定。在金属性故障前后换流器输出有功功率为2.5 MW;在非金属性故障前后输出有功功率为4 MW。柔性直流系统各项参数如附录C 表C1 所示。模型搭建基于RTDS 仿真试验平台。平台由RTDS-RACK 机柜、GTFPGA 硬件单元、功率放大器、RTDS 开入开出接口板卡、交直流配电网系统运行人员工作站、换流器主控机柜等组成。其中换流器主控机柜中采用的控制保护装置为柔性直流工程实际使用的二次设备。
5.2 控制策略对典型保护元件的支撑作用仿真验证分析
RTDS 仿真验证中,在图7 所示故障位置施加不同类型、不同程度故障,通过控保装置录波功能记录故障期间测量点处三相电压(单位为kV)和三相线电流(单位为kA),并实时完成序分量相位分析,针对前述典型保护元件的故障判别原理,计算正负序故障分量阻抗相位(方向元件)和电流序分量相位差(选相元件)。部分典型故障的记录分析结果如下。
5.2.1 AB 相间金属性短路
RTDS 试验波形如图8 所示。因为相间故障时无零序电流,所以不记录零序电流相关相位分析结果。波形显示,在采用常规的负序电流抑制策略时,由于故障期间换流器不输出负序电流,且维持单位功率因数,换流器故障分量阻抗相位未得到有效控制,序分量方向元件和选相元件均无法得到有效测量结果,无法进行有效故障辨识。
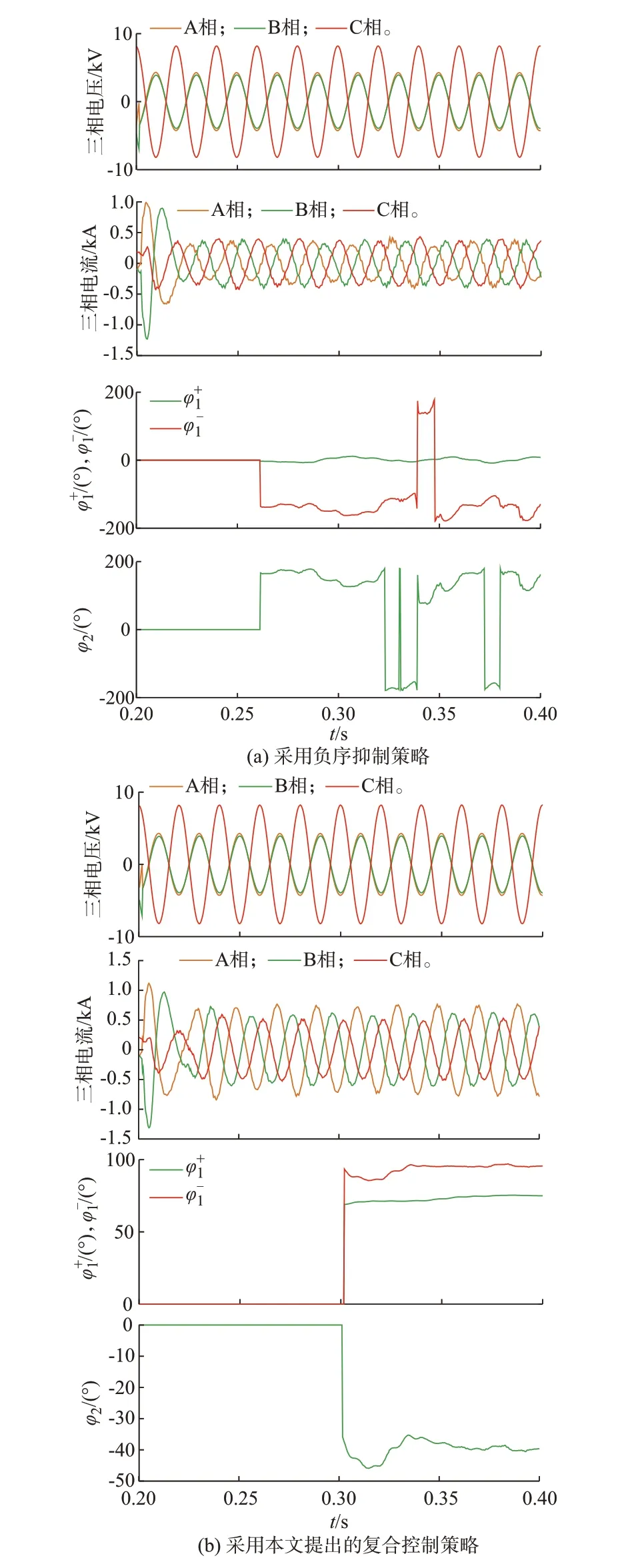
图8 AB 相间金属性短路RTDS 仿真结果Fig.8 RTDS simulation results of metallic short circuit between phase A and B
采用本文所提复合控制策略的情况下,换流器故障分量网络下的正序阻抗角φ+1=∠(-ΔU˙+/ΔI˙+)控制在70°~80°,负序阻抗角φ-1=∠(-ΔU˙-/ΔI˙-)控制在90°~100°,故障分量方向保护元件可以明确判别故障方向。正序电流故障分量与负序电流相位差φ2=∠(-ΔI˙+/ΔI˙-)控制为-40°左右,序分量选相元件可以正确判定故障类型为AB 相间故障。本文所提复合控制策略可以有效支撑上述典型保护元件的故障判别能力。
实验结果中实际相位与控制目标之间存在轻微差异,但不影响保护元件故障判别。造成差异的主要原因包括:
1)测量元件故障分量提取存在误差;
2)控制算法依赖于正序电压相位,对故障前后相位准确性较敏感;
3)换流器电流控制环对本文控制策略输出的电流指令的跟踪存在误差;
4)测量点与换流器控制所用采样点(隔离变压器阀侧)位置不同,测量点所得阻抗特性还包含隔离变压器和线路阻抗的影响。
5.2.2 B 相非金属性接地短路
故障位置处施加B 相非金属性接地短路,B 相电压跌落为额定值的1/3,仿真波形见附录C 图C1。
在采用常规的负序电流抑制策略时,换流器故障分量网络下的正序阻抗角在60°左右,由于不输出负序电流,无法测得稳定的负序阻抗角。从结果上,正序故障分量方向保护元件可以判别故障方向。但是需要指出的是,此时稳定的正序阻抗角是故障前后正序电压相位跳变所致,如前文分析过程,阻抗角大小受故障类型、故障程度、系统参数影响很大,以此为判别依据,对保护可靠性和灵敏性均有不利影响。正序电流故障分量与负序电流相位差、零序电流与负序电流相位差均不能使序分量选相元件正确工作。
采用本文所提附加控制策略后,换流器故障分量阻抗角和电流序分量相位差均受到稳定控制,有效支撑典型保护元件的故障判别。
5.2.3 各类型故障仿真结果总结
RTDS 仿真试验中所有故障情况下的结果如 表2 所 示,表 中:选 相 判 据1 为,选相 判 据2 为;相 角 取 值 时 刻 为 故 障 发生后60 ms。

表2 RTDS 仿真试验结果汇总Table 2 Results of RTDS simulation test
表1 中结果显示,在各类故障下,采用常规的负序抑制控制时,序分量方向元件测量结果显著偏离系统相角,选相元件则可能选相错误或无法有效选相。采用本文所提出的复合控制算法时,换流器能够有效控制故障分量网络下的阻抗角,从而满足序分量方向元件和选相元件的故障辨识需求。
6 结语
本文所提复合控制策略,面向交流线路的序分量方向元件和选相元件,以新能源汇集送出柔性直流线路的受端换流器为对象,重新构建了VSC 在故障分量网络下的阻抗特性。该方法基于换流器常规的正负序分离电流内环控制结构,可作为故障期间的附加控制,代替原有的负序外环和正序无功外环。RTDS 仿真试验表明,本文所提控制策略可以有效控制换流器故障分量网络中的阻抗相角,实现对序分量方向元件和选相元件的故障辨识能力的支撑。
本文所提控制策略还具备继续研究的空间,主要体现在:
1)控制策略应用对象为新能源汇集送出线路的受端换流器,对于其他场景的VSC 的应用效果以及控制策略调整还有待研究。
2)所提控制策略适用工况为向交流系统输出有功功率(逆变端),对于整流端的换流器故障处理方式还需要进一步讨论。
3)该策略受换流器容量限制,当换流器可用容量不足以满足算法得到的电流指令时,算法仅能令阻抗特性接近理想状态。算法在换流器重载或满载情况下的效果被削弱。
4)由于算法本身仅提供电流环指令值,整体动态性能依赖于换流器电流控制环的动态性能。可进一步研究本文所提算法与换流器现有控制结构的整体优化方式。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:36
电子制作(2019年11期)2019-07-04 00:34:54
西南交通大学学报(2018年6期)2018-12-18 02:22:18
测控技术(2018年10期)2018-11-25 09:35:38
进出口经理人(2017年7期)2017-09-20 07:31:11
电测与仪表(2016年15期)2016-04-12 00:30:52
通信电源技术(2016年5期)2016-03-22 01:10:10
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
电测与仪表(2014年5期)2014-04-09 11:34:14
电力工程技术(2014年6期)2014-03-20 14:19:40