基于图像、气味识别相融合的扫地机器人控制策略
2023-12-08 12:31孙霖
电子制作 2023年22期
孙霖
(中国石油大学(华东),山东青岛,266580)
0 引言
扫地机器人,又称自动打扫机、地宝等,是一种智能化家用电器。近年来,业界在对扫地机器人的研究主要聚焦于避障、自清洁等领域[1],然而,对于养宠物的家庭,经常会遇到宠物在家里的地板上排放粪便的情况,若扫地机器人不能正确识别粪便而将其作为常规污染物,采用常规的模式对地板进行清理,极有可能会把粪便扩散的满屋子都是。现有的粪便识别方法常用两种,一种是通过图像识别,先将不同形状粪便照片提供给扫地机器人,结合使用环境中扫地机器人拍摄的图片对粪便进行识别;另一种是通过气味识别,如公开号为(CN108991993A)的中国发明专利通过周围空气中氨气、硫化氢等气体浓度用于对动物粪便进行识别[2],然而,上述方案存在以下几个问题:仅通过气体或仅通过图像对粪便的识别,识别准确度不高;异味气体受风向影响较大,当粪便位于扫地机器人的下风口时有可能识别不出。
针对以上问题,本文采取的基于图像、气味识别相融合的扫地机器人控制策略可以将宠物粪便识别准确率提高到95%以上。
1 硬件系统设计方案
本文设计的扫地机器人控制系统,如图1 所示,由电源模块,处理器,光线强度传感器,摄像头,气体传感器,粪便清理模块等组成。
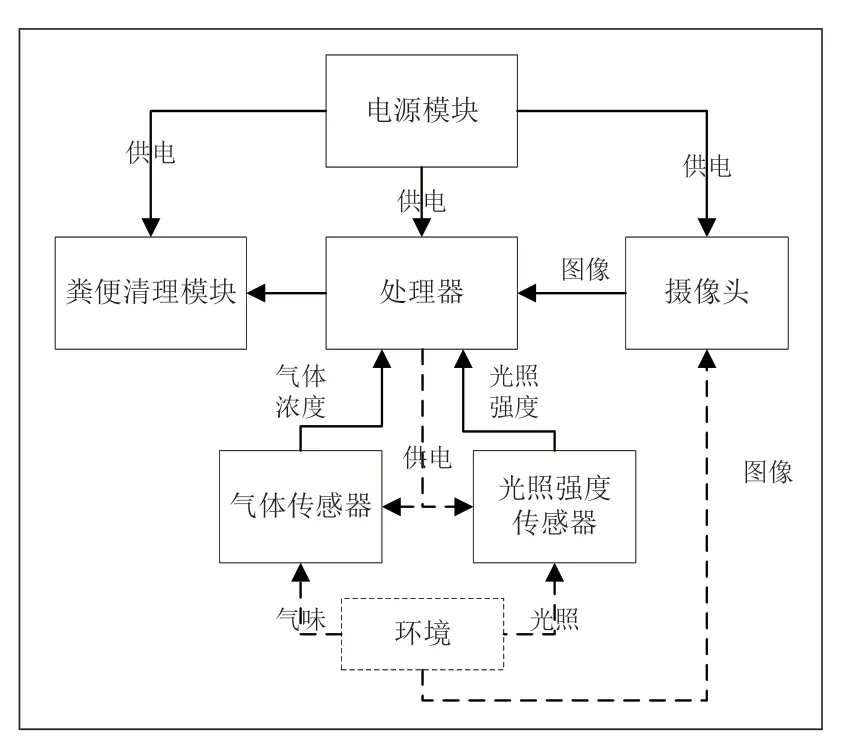
图1 扫地机器人电路连接图
■1.1 光线强度传感器
光线强度传感器型号为BH1750,集成在扫地机器人的侧边,用于感知行进路线内的光照强度,并将结果发送给处理器。该传感器是一种用于两线式串行总线接口的数字型光强度传感器,可方便集成于其他结构部件中,同时,其内部由光敏二极管、运算放大器、ADC 采集、晶振等组成,对应广泛的输入光范围,光强检测的准确率高。
■1.2 处理器
核心处理器芯片为SMT32F103C8T6,该芯片配有ARM Cortex-M3 32 位微控制器,48 路LQFP 封装.它结合了高性能的RISC 内核,运行频率可达72MHz。处理器接收光线强度传感器、摄像头、气体传感器信号,实现图像识别模块、气体识别模块和判断模块三个模块功能,图像识别模块用于通过图像判断扫地机器人的行进路线前方是否存在宠物粪便;气体识别模块[4],用于根据气体传感器模块采集的气体含量识别是否存在宠物粪便;判断模块,用于判断图像识别模块与气体识别模块输出的结果是否相同,用于对光线强度传感器采集的光线强度与预设阈值比较。
■1.3 摄像头
摄像头的型号为KS861-60,集成于扫地机器人的侧边,且距地高度和角度可灵活调节,优先选择为广角的摄像头,以方便采集行进路线前方的图像[5],并传输给处理器。
■1.4 气体传感器
气体传感器包括氨气传感器、硫化氢传感器和甲烷传感器,用于采集环境中的气体信息,并将结果传输给处理器,氨气传感器选用MQ137 产品,MQ137 气体传感器所使用的气敏材料是电导率较低的二氧化锡,灵敏度高,寿命长,采用简单的电路即可将电导率的变化转换为与该气体浓度。
■1.5 粪便清理模块
粪便清理模块为强力吸尘装置,在检测到宠物粪便时,首先通过强力吸尘装置将宠物粪便吸进扫地机器人中单独的粪便储存袋中,不与灰尘袋混用,同时,处理器控制清水桶将水洒在清洗刷具上清洗,并将污水聚拢收集到污水箱,可将宠物粪便完全清理干净。
2 软件系统设计方案
基于图像、气味识别相融合的扫地机器人控制策略流程如图2 所示。
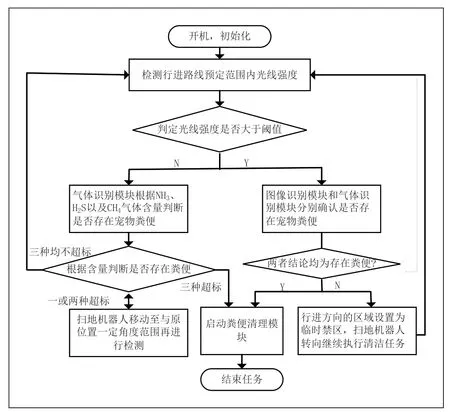
图2 扫地机器人控制策略流程图
扫地机器人在工作状态时,会处于动态环境中,环境参数会随时变化,因此,首先检测扫地机器人所处环境中的光线强度,根据环境光线强度的不同,采取不同的控制策略,具体包括以下步骤:
步骤1:控制扫地机器人的光线强度传感器检测行进路线预定范围内的光线强度,并将检测结果发送给处理器。
步骤2:处理器将收到的光线强度值与预设阈值比较;若大于等于预设阈值,则进入步骤3,采用强光照强度处理策略;若小于预设阈值则进入步骤5,采用弱光照强度处理策略。
扫地机器人在工作过程中,会处于动态环境中,有时候需要在桌子、沙发等家具的下面执行清理任务,有时候需要去卫生间执行清理任务,处于不同的位置扫地机器人的环境参数变化较大,因此,本文设置了判断光线强度的步骤,根据不同的光线强度控制执行不同的宠物粪便识别流程。
步骤3:如图3 所示,为强光线环境下控制策略流程图。摄像头采集扫地机器人行进路线前方的图像,传输给图像识别模块,其储存有卷积神经网络(Convolution Neural Network,CNN)的图像识别模型,可用于识别图像中是否具有宠物粪便[6~7];气体传感器采集环境中的气体信息,当任一个传感器采集的气体含量大于对应的预设的气体含量阈值,则气体识别模块就输出存在宠物粪便的结果。然后进入步骤3。

图3 强光线环境下控制策略流程图
当扫地机器人处于具有较高光照强度的环境中时,集成在其上的摄像头能够采集到清晰的图像数据,可精确地识别出行进路线的前方区域是否存在宠物粪便。
在实验中,设置具有宠物粪便的环境与无粪便环境,然后利用气体传感器对环境中气体含量进行检测,根据检测的各气体含量结果设置对应气体的预设的气体含量阈值。
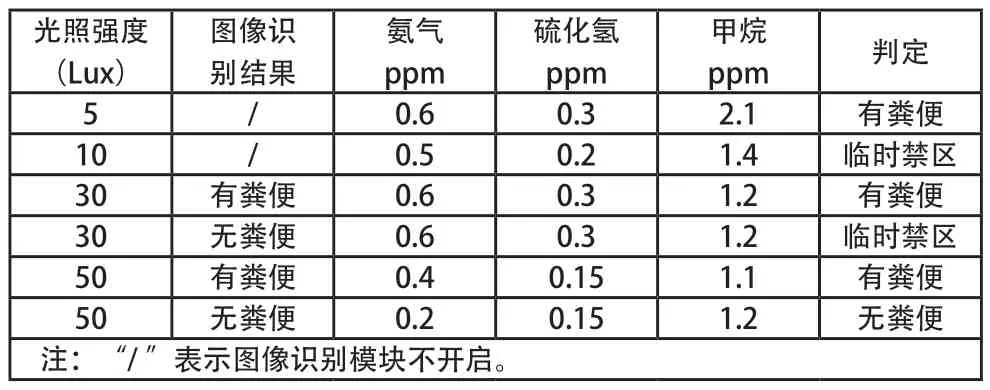
气体识别模块对所述气体信息进行识别,判断是否存在宠物粪便具体过程为:若所述氨气传感器、所述硫化氢传感器、所述甲烷传感器中任一个传感器采集的气体含量大于对应的预设的气体含量阈值,则所述气体识别模块就输出存在宠物粪便的结果。举例来说,设定判定存在宠物粪便的氨气传感器检测的氨气含量阈值为a,设定判定存在宠物粪便的硫化氢传感器检测的硫化氢含量阈值为b,设定判定存在宠物粪便的甲烷传感器检测的甲烷含量阈值为c,此时,氨气传感器检测的气体含量为a1,硫化氢传感器检测的气体含量为b1,甲烷传感器检测的气体含量为c1,若a1 >a,b1 <b,c1 步骤4:处理器判断图像识别模块输出的结果与气体识别模块输出的结果是否相同,若相同且均未存在粪便,则确认存在宠物粪便,控制粪便清理模块清理宠物粪便,如不同,进入步骤6。 由于风向对气体的影响以及气体传感器灵敏度对检测结果存在影响等原因,设置了图像识别结果以及气体识别结果双结果验证的过程,因此,在具有图像识别结果时,本文设置了上述三种传感器任一个传感器检测出粪便气体超标,即认定为存在宠物粪便,这样,可大大减少图像识别结合和气体识别结果不同的情况,有助于最终结果的确认。 步骤5:如图4 所示,为弱光线环境下控制策略流程图,气体传感器采集空气中的NH3、HS、CH4气体含量;气体识别模块根据三种气体含量判断是否存在宠物粪便;若存在宠物粪便,则控制粪便清理模块清理宠物粪便;若不存在,则扫地机器人沿预设路线前进[8],执行步骤1;若调整方向检测后有一种或两种超过阈值,执行步骤6。 图4 弱光线环境下控制策略流程图 气体识别模块判断三种气体含量是否均超过阈值;若均超过阈值,则输出存在宠物粪便的结论;若均不超过阈值,则输出不存在宠物粪便的结论;若三种气体中有一种或两种超过阈值,为了避免因风向对气体传感器模块的影响,则机器人移动至与原始位置成一定范围角度的位置,再进行检测。具体移动的位置可以为一个范围,以扫地机器人前方1m 的点为圆心,以1m 为半径做圆周运动,移动90°~270°范围内的区间的点。 步骤6:将扫地机器人的行进方向的区域设置为临时禁区,扫地机器人转向继续执行清洁任务。 图像识别模块和气体识别模块输出的结果不同时,将图像以及气体数据传送到用户手机的APP 中,供用户进行人工认定,由于这个过程需要一定时间,因此,可通过设置临时禁区的形式,使扫地机器人暂时先不进入上述区域,待用户确认后再行处理上述区域,以避免将宠物粪便扫到满屋的情况。 参考CIE 国际发光照明委员会标准《室内工作场所照明》S008/E--2001 的分级标准,将环境光线强度分别设置为5Lux,10Lux,20Lux,30Lux,50Lux,100Lux,将光照强度大于等于30 Lux 设置为强光线环境,设定判定存在宠物粪便的气体传感器检测的氨气含量阈值a 为0.3ppm,硫化氢含量阈值b 为0.2ppm,甲烷含量阈值c 为1.8 ppm,通过实验,验证结果如表1 所示。 表1 不同光照强度下识别策略比对 通过分析,本文提出的方法较常用的宠物粪便识别处理方法,识别正确率有大幅度提高,统计分析,识别正确率可达95%以上,可以极大提升用户的使用体验。 本文针对宠物粪便清理这一需求设计的扫地机器人控制策略,采用基于图像和气体识别相融合的方法,根据工作环境光线强度不同,采用不同的识别策略,强光环境采用图像与气体识别相结合识别,弱光环境仅采用气体识别,宠物粪便识别的准确率可以大幅度提高。并且在通过气体识别宠物粪便时,在仅识别出一种或两种气体时,考虑风向影响,扫地机器人变换位置,在不同角度进行检测,进一步提高了气体识别的准确率。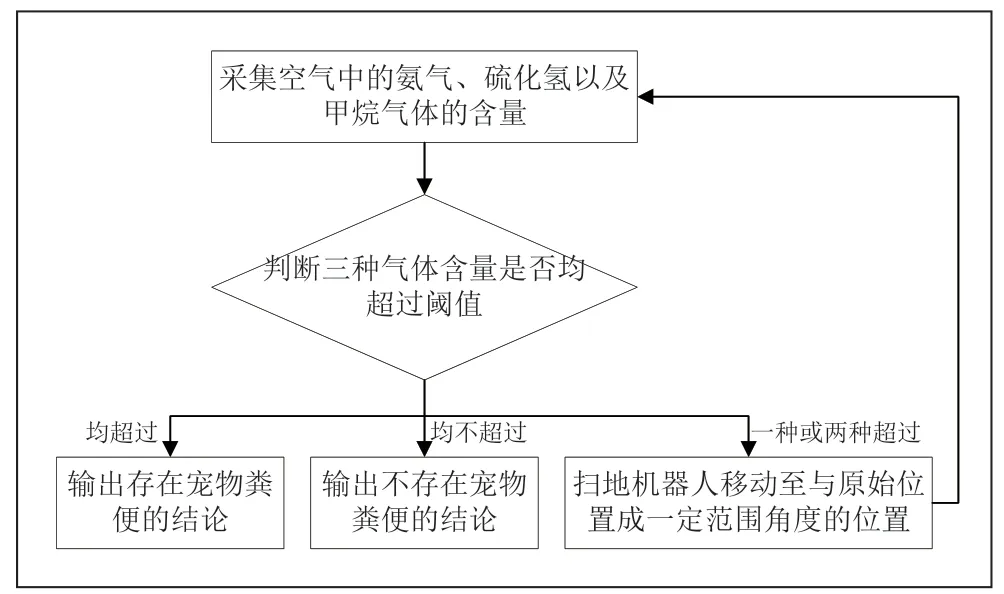
3 结果分析
4 结论
猜你喜欢
故事作文·低年级(2022年10期)2022-12-31
中学生数理化·高一版(2017年5期)2017-06-07
童话世界(2017年8期)2017-05-04
作文周刊·小学一年级版(2016年36期)2017-03-03
儿童故事画报·智力大王(2016年6期)2016-09-14
数学大王·低年级(2016年7期)2016-05-14
上海故事(2015年10期)2015-12-03
河南畜牧兽医(2015年13期)2015-11-28