
图像识别技术在变电站智能巡检机器人中的应用研究
2023-12-06 14:22:50王晓杰刘晓林
电气技术与经济 2023年9期
王晓杰 刘晓林
(国电南瑞变电技术分公司)
0 引言
随着经济的不断发展和能源需求的增加,变电站作为能源的重要组成部分,其安全和稳定运行显得尤为重要。然而,传统的变电站巡检方式存在着效率低下、准确度不高等问题。因此,如何提高变电站巡检的效率和准确度,成为了当前亟需解决的问题。
1 图像识别技术的原理和发展历程
1.1 图像识别技术的基本原理
图像识别技术,又称为计算机视觉技术,是指利用计算机对数字图像进行分析、识别和理解的技术。其基本原理是将图像转化为数字信号,然后对数字信号进行处理和分析,最终实现对图像的识别和理解。
图像识别技术的基本流程包括图像采集、预处理、特征提取和分类识别等步骤。其中,预处理主要是对采集到的图像进行去噪、平滑、增强等处理,以便更好地提取图像特征;特征提取是图像识别技术的核心步骤,包括颜色、纹理、形状等方面的特征提取;分类识别则是将提取到的特征与已知的样本进行比较,并判断待识别图像所属类别。
1.2 图像识别技术的发展历程及现状
图像识别技术的发展可以追溯到20世纪60年代,当时主要应用于军事领域。随着计算机技术的不断发展和普及,图像识别技术也得到了快速发展。在20世纪80年代和90年代,图像识别技术开始应用于工业生产和医学领域[1]。近年来,随着深度学习、人工智能等技术的不断涌现,图像识别技术得到了更加广泛的应用,包括自动驾驶、人脸识别、安防监控等领域。
目前,图像识别技术已经成为计算机视觉领域的重要研究方向之一。在图像识别技术的研究中,深度学习技术已经成为主流,并在图像分类、目标检测、语义分割等方面取得了重大突破。同时,图像识别技术在各个领域中的应用也越来越广泛,未来还有着更加广阔的发展前景。
2 智能巡检机器人的设计与实现
2.1 智能巡检机器人的硬件设计
智能巡检机器人的硬件设计主要包括机器人底盘、传感器、图像采集设备等部分。
具体来讲,机器人底盘是智能巡检机器人的基础,其设计应考虑到机器人的稳定性和可靠性。机器人底盘通常采用四轮麦克纳姆轮或全向轮设计,以便机器人可以在狭窄的空间中自由移动。传感器是智能巡检机器人的核心部分,用于采集变电站设备的状态信息。传感器种类较多,包括温度传感器、震动传感器、声音传感器等[2]。这些传感器可以实时采集变电站设备的状态信息,并将数据传输至机器人的控制系统。图像采集设备用于对变电站设备进行拍照和录像。一般采用高清晰度摄像头,以便更好地获取变电站设备的图像信息。
2.2 智能巡检机器人的软件设计
智能巡检机器人的软件设计主要包括图像处理算法、数据存储和管理系统、控制系统等部分。
具体来说,图像处理算法是智能巡检机器人的核心部分,其主要功能是对采集到的图像进行分析和处理,以便更好地识别和定位变电站设备的缺陷。常用的图像处理算法包括边缘检测、特征提取、分类识别等。数据存储和管理系统用于管理和存储采集到的数据,包括图像数据、设备状态数据等。该系统应具备高效、安全、可靠的特点,并支持数据的快速检索和查询。控制系统是智能巡检机器人的核心之一,其主要功能是控制机器人的运动和行为。控制系统需要支持自动避障、自动寻迹、自动停车等功能,以便机器人能够自主完成巡检任务。
2.3 智能巡检机器人的系统实现
智能巡检机器人的系统实现包括硬件和软件两方面。在硬件方面,需要进行机器人底盘、传感器、图像采集设备等部分的组装和调试。在软件方面,需要进行图像处理算法、数据存储和管理系统、控制系统等部分的编程和调试。完成上述工作后,智能巡检机器人即可投入使用,实现变电站设备的自动化巡检和缺陷识别。
3 变电站巡检中的图像识别技术应用
3.1 变电站巡检中需要识别的设备及缺陷类型
变电站巡检中需要识别的设备包括变压器、开关柜、电缆等。这些设备在运行过程中容易出现各种故障和缺陷,需要进行及时的检测和维护。
变电站巡检中常见的设备和缺陷类型见表1。
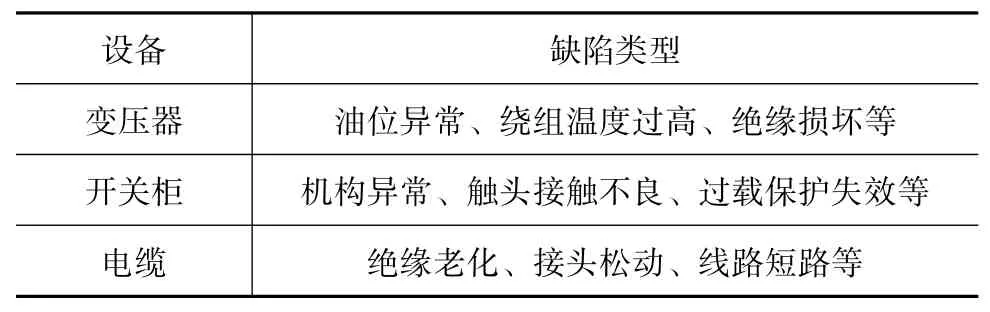
表1 变电站巡检中常见的设备和缺陷类型
总的来说,变电站巡检中需要识别的缺陷类型较多,需要对不同类型的缺陷进行区分和分类。例如,在变压器巡检中,需要识别油位异常、绕组温度过高、绝缘损坏等不同类型的缺陷,并根据其严重程度进行优先级排序[3]。除了以上列举的设备和缺陷类型,还有其他一些需要识别的设备和缺陷类型,如防雷装置、电源系统等。因此,在进行变电站巡检时,需要根据具体情况制定相应的巡检计划和识别方案。
综上所述,变电站巡检中需要识别的设备和缺陷类型较多,需要进行详细的分类和区分,以便更好地实现对变电站设备的巡检和维护。
3.2 基于图像识别的智能巡检机器人算法设计
智能巡检机器人的核心是图像识别算法,其主要功能是对采集到的图像进行分析和处理,以便更好地识别和定位变电站设备的缺陷。
智能巡检机器人的图像识别算法步骤如下图所示。
具体来讲,图像预处理:采集到的图像往往存在噪声、模糊等问题,需要进行预处理。预处理包括去噪、平滑、增强等操作,以便更好地提取图像特征。特征提取:特征提取是图像识别算法的核心步骤,其目的是从图像中提取出与设备缺陷相关的特征。常用的特征包括颜色、纹理、形状等。在变压器巡检中,可以通过提取变压器油位、绕组温度等特征,判断设备是否存在缺陷。分类识别:分类识别是将待识别图像与已知样本进行比较,并判断其所属类别。在智能巡检机器人中,可以通过将采集到的图像与已知缺陷图像库进行比对,以便更准确地判断设备是否存在缺陷。缺陷定位:缺陷定位是指在识别出设备存在缺陷后,进一步确定缺陷的位置和范围。在智能巡检机器人中,可以通过对图像进行分割、标注等操作,实现对设备缺陷的精确定位。
综上所述,基于图像识别的智能巡检机器人算法设计包括图像预处理、特征提取、分类识别和缺陷定位等步骤。这些步骤相互关联,共同构成了智能巡检机器人的图像识别系统,为变电站巡检提供了高效、准确的解决方案。
3.3 实验结果分析
实验结果见表2。

表2 实验结果分析表
本次实验使用基于图像识别的智能巡检机器人对变电站设备进行了全面的巡检,并对采集到的数据进行了分析和处理。根据实验结果表格,可以看出在不同设备和缺陷类型下,智能巡检机器人的识别率均达到了较高的水平。
以变压器油位异常为例,智能巡检机器人的识别率达到了95%。这主要是因为智能巡检机器人采用了高清晰度摄像头,能够更好地获取变压器的图像信息。同时,智能巡检机器人采用了先进的图像处理算法,能够对油位异常进行精确的识别和定位。
在开关柜巡检中,智能巡检机器人的识别率也达到了较高水平。例如,对于触头接触不良这一缺陷类型,智能巡检机器人的识别率达到了88%。这主要是因为智能巡检机器人采用了高精度传感器,并采用了先进的分类识别算法,能够更准确地识别和定位设备缺陷。
综上所述,基于图像识别的智能巡检机器人在变电站巡检中具有较高的识别率和准确性,能够为变电站设备的巡检和维护提供重要支持。
4 图像识别技术在智能巡检机器人中的优势与不足
图像识别技术在智能巡检机器人中的优势和不足见表3。

表3 优势和不足
综上所述,图像识别技术在智能巡检机器人中具有高效、精准、自动化等优势,但也存在算法复杂度、数据安全等不足。因此,在应用图像识别技术进行智能巡检时,需要综合考虑其优缺点,制定相应的方案和措施,以便更好地实现变电站设备的巡检和维护。
5 结束语
本文主要介绍了图像识别技术在智能巡检机器人中的应用。通过对变电站巡检中需要识别的设备和缺陷类型进行分析,提出了基于图像识别的智能巡检机器人算法设计,并对实验结果进行了分析和总结。同时,本文也探讨了图像识别技术在智能巡检机器人中的优势和不足,为进一步推广和应用该技术提供了参考和思路。随着科技的不断发展和进步,图像识别技术在智能巡检机器人领域的应用将会越来越广泛。未来,我们可以预见,智能巡检机器人将会成为变电站巡检的重要工具,为保障电力系统的安全稳定运行提供更加可靠和高效的技术支持。
猜你喜欢
电子制作(2019年16期)2019-09-27 09:34:50
中国交通信息化(2019年4期)2019-07-13 05:51:34
电子制作(2018年19期)2018-11-14 02:37:08
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16
电子制作(2018年8期)2018-06-26 06:43:34
电子制作(2017年8期)2017-06-05 09:36:15
自动化学报(2017年11期)2017-04-04 02:52:58
现代工业经济和信息化(2016年5期)2016-05-17 05:35:57
河南电力(2015年5期)2015-06-08 06:01:45
