基于无人机的桥梁表观病害快速采集与识别
2023-12-04 08:29吴华勇赵荣欣周子杰贾鹏飞
城市道桥与防洪 2023年11期
吴华勇,王 枫,赵荣欣,周子杰,贾鹏飞
(上海市建筑科学研究院有限公司上海市工程结构安全重点实验室,上海市 200032)
0 引 言
随着我国城镇化进程的加速和城市基础设施的快速发展,道路、桥梁、隧道等基础设施的规模不断扩大。巨大的建成体量给基础设施的运行和维护带来了繁重的人力及资金压力。传统的桥梁基础设施的安全主要以人工纸笔记录的方式开展人工巡查和定期检测,这种方式费时费力,受主观影响较大,容易产生遗漏和误差,亟需数字化的感知手段进行提质增效。
近两年,国内已有不少学者开展无人机桥梁检测技术研究,并取得了一定的成果。如吴凌霄等(2023)以邵阳市桂花悬索大桥为实验对象,采用无人机倾斜摄影测量手段构建了悬索桥三维模型并开展病害检测。朱泽文等(2023)介绍了吉林省某大桥和江西省某大桥的无人机检测应用实例。张斌等(2022)提出一种二维高精度数字资产与三维建模相结合的铁路桥梁无人机巡检方法。孙宏斐(2022)结合深度学习等技术,针对无人机获取的桥梁图像,提出了一种先通过分类网络判别缺陷所在区域,然后通过分割网络确定区域内缺陷像素点, 最后根据距离信息实现缺陷定量检测的检测方式。李峰(2021)提出了基于无人机及深度学习的桥梁结构裂缝智能方法,其识别的裂缝宽度与裂缝测量仪结果吻合,其绝对误差小于0.097 mm,相对误差小于9.8%。
本文采用商用小型无人机对公路桥梁表观病害信息进行快速采集与识别,通过3D 点云技术进行三维全息建模,采用深度学习算法对桥梁表观病害进行分类识别提取,采用计算机视觉技术对桥梁病害尺寸信息进行识别,实现桥梁表观病害的快速采集与智能化化识别。
1 基于无人机的桥梁表观信息快速采集
本文选取胜辛路桥作为试验对象,如图1 所示该桥位于G1503 高速公路北环线,桥位桩号K181+102。该桥为上、下行两幅桥各15 跨,桥长300 m,桥面总宽32 m,上部构造形式为预应力空心板梁,下部构造形式第1-14 跨为柱式,0#台与15#台为埋置式。上、下行上部结构各由225 片预应力空心板梁组成,桥面采用沥青混凝土面层,支座采用板式橡胶支座。设计荷载为汽车超20 级,挂车120。胜辛路桥于1999 年8 月建成通车,至今已运行20 多年,部分结构出现不同程度的病害见图1,本文主要采用商用无人机对胜辛路桥跨线部分的7 至8 跨进行表观病害采集,在无人机无法到达的部分采用近景摄影测量技术利用相机拍照的方式采集桥梁表观病害。
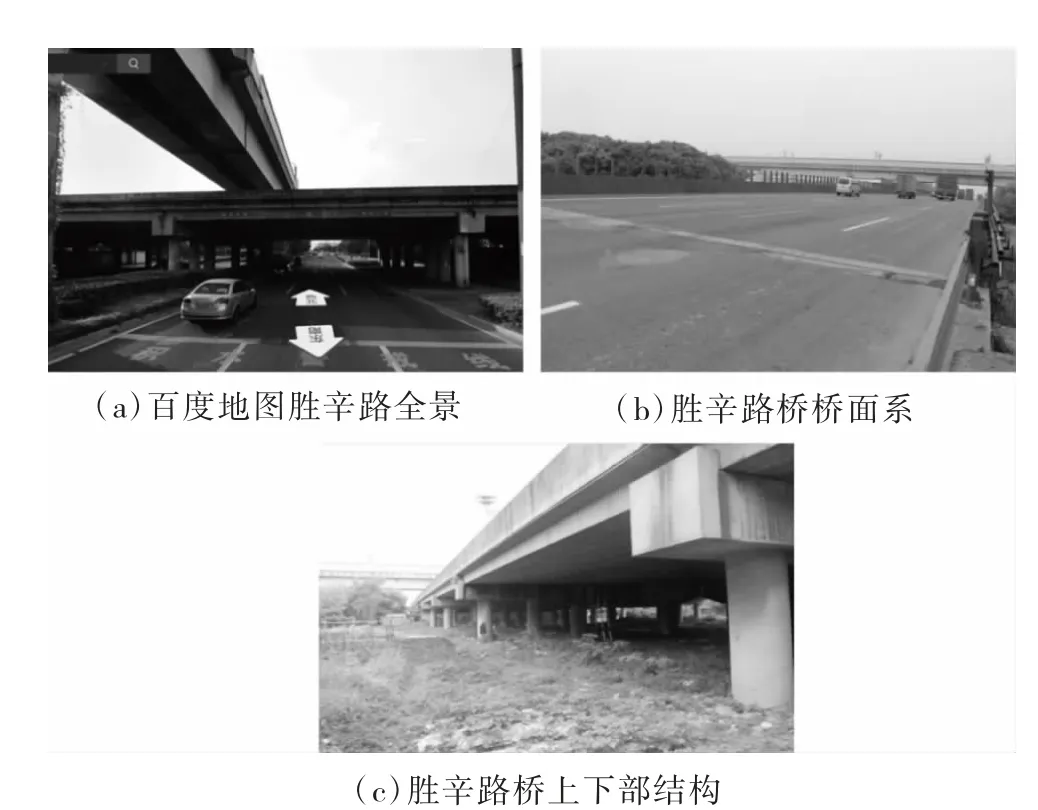
图1 胜辛路桥现状
桥梁表观数据采集方式主要是通过大疆PHANTOM 4 RTK 无人机(见图2)自动采集试点桥梁路面及侧面照片(见图3),桥梁底部无人机无法采集的地方采用佳能单反相机(见图4)人工拍照的方式进行试点桥梁桥底(见图5)外观数据采集。

图2 大疆P HANTOM 4 RTK 无人机

图3 大无人机自动采集数据

图4 佳能5DMARK4 相机

图5 人工拍照采集数据
2 胜辛路桥倾斜摄影建模
现场无人机飞行4 架次,约1 h,共采集照片1 233 张。人工桥底拍照1 h,采集相机照片542 张。将现场采集到的照片进行三维建模分析,图6 为倾斜摄影三维建模流程。采用的硬件配置为工作组包括2 台32 g 内存、i7cpu、gtx1080,1 台64 g 内存、i7cpu、gtx1080,建模时间为无人机照片8 h,相机照片8 h。建模结果见图7,三维模型的相对精度为0.000 5~0.022 m,正射影的精度为0.001 5~0.022 m。模型精度与照片像素及拍摄距离有关,照片像素越高、拍摄距离越近,模型精度越高。本项目中,无人机与桥梁的最近距离为2 m。
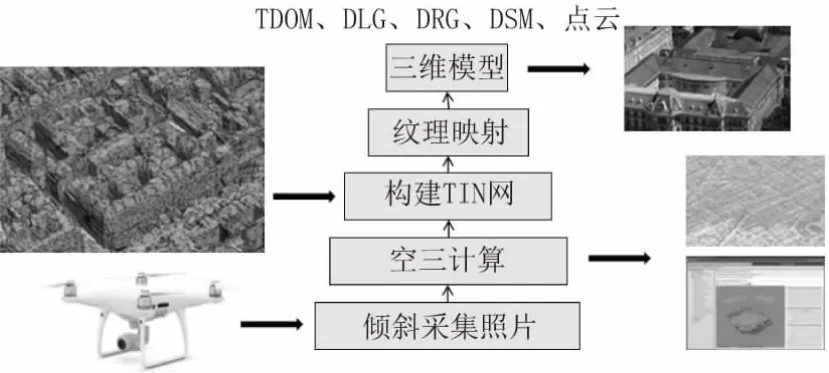
图6 倾斜摄影三维建模流程
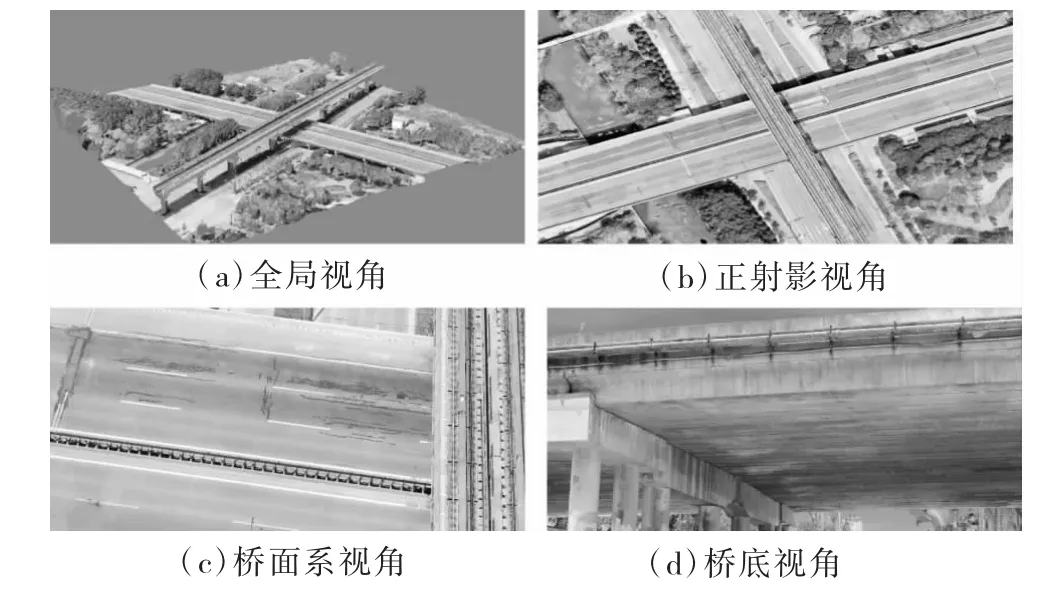
图7 胜辛路桥倾斜摄影模型
3 基于人工智能算法的病害识别
针对无人机与相机采集的大量桥梁表观照片,研究使用了最新的YOLOv3 目标检测神经网络模型对裂缝等表观病害进行自动识别的方法。训练过程中,我们采用了在先前收集的大规模桥梁表观裂缝图像数据集上进行的迭代优化。训练数据集包含了2032 张桥梁裂缝的实例,并使用Labelimg 工具对裂缝进行目标框标注。将这些标注好的图像按照7∶2∶1 的比例被分为训练集、验证集和测试集,用于模型训练、性能验证和测试。确保模型能够学习到丰富的特征并准确地进行裂缝检测。
3.1 YOLOv3 目标检测神经网络模型
YOLO(You Only Look Once)是一种流行的实时目标检测算法,YOLOv3 是其改进的第三版,具有更高的检测准确率和更好的性能,是目前最具普适性的版本。如图8 所示,YOLOv3 采用单阶段检测方法,在一次前向传递中即可对图像中的多个目标进行检测。相比于传统的两阶段检测算法,YOLOv3 具有更快的处理速度,适合应用于无人机实时采集大量图像的场景。
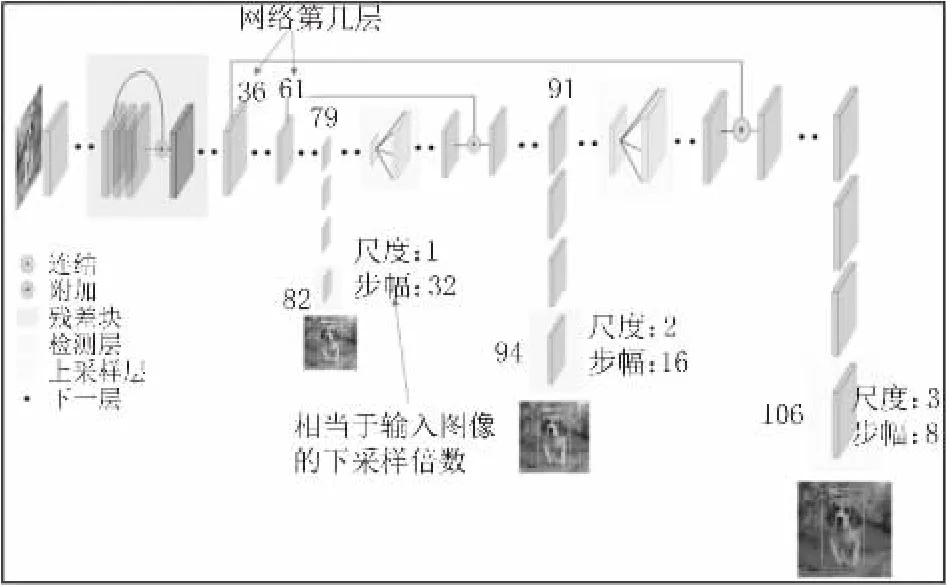
图8 YOLOv3 网络模型结构图
3.2 YOLOv3 模型识别结果与分析
本研究模型使用了PyTorch 作为深度学习框架,搭建了YOLOv3 目标检测模型。PyTorch 提供了丰富的工具和便捷的API,使得模型的构建、训练和推理都变得更加高效和简单。模型还使用了搭载预训练模型、应用交叉熵损失函数、配置训练优化器Adam等训练策略来优化模型在训练中的表现。硬件方面,模型训练在配置有图形处理单元(GPU)的工作站上进行(CPU:INTEL I9-9900X,内存:16GB*6,GPU:NVIDIA GeForce RTX 2080TI*4)。模型参数设置与调优是深度学习中最为关键的一步,选择合适的模型参数对模型推理结果的准确性产生较大影响,且影响模型训练与识别时间。本文通过对训练样本的优化调整与不同参数设置来进行了多次训练试验,并在验证集上评估其识别的准确率模型在测试集中的精度、召回率、F1 值等评价指标,同时对一些典型样本的识别结果进行展示,见图9。最终我们训练得到的最佳模型,其单张图像的处理时间为12.2 ms;准确率为81%,召回率为78%,具有良好的预测性能。
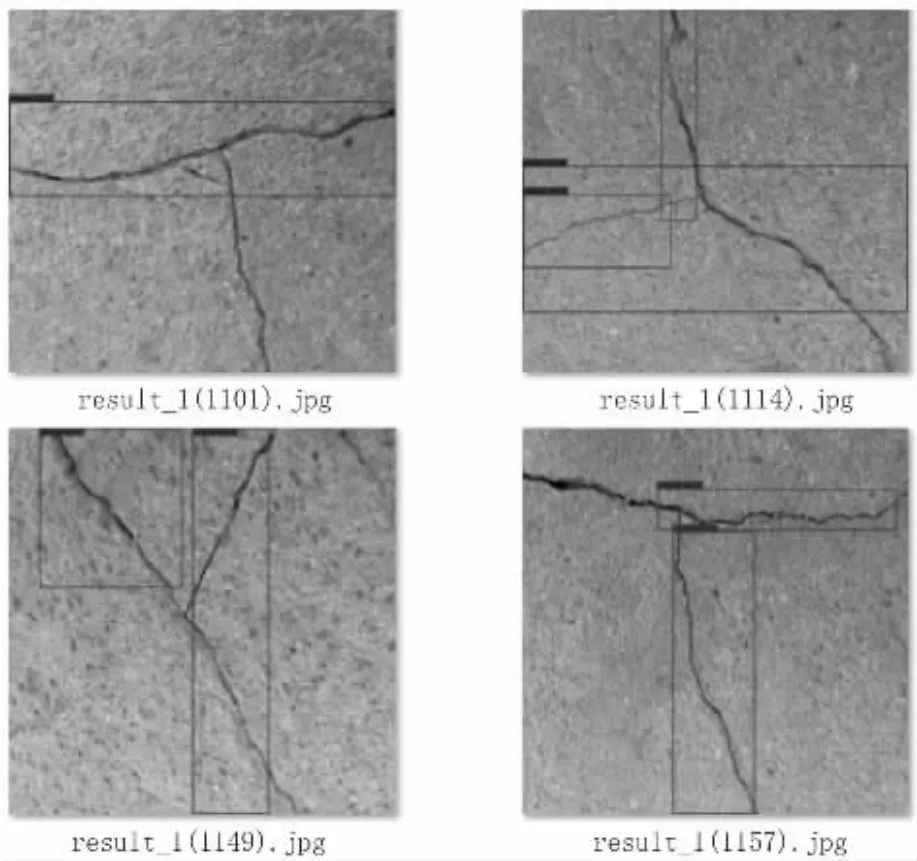
图9 桥梁表观裂缝自动识别结果
4 结 语
本文通过融合地理信息数据与无人机技术,配合倾斜摄影、激光雷达的技术方案,实现了桥梁上部及下部结构表观图像数据的快速采集,再通过3D 点云技术进行目标桥的三维全息建模。另一方面,采用深度学习算法对桥梁表观病害进行分类识别提取,采用计算机视觉技术对桥梁病害尺寸信息进行识别,实现桥梁表观病害的快速采集与智能化识别。使用该方法对上海市G1503 绕城高速胜辛路桥开展了相关的桥梁检测工作,检测精度高,工作效率提升了30%以上,取得了良好的应用效果。不过该方法也具有一定的局限性,无人机的操控需要技术人员的熟练使用以降低飞行中的损毁风险;由于桥梁检测现场环境的复杂性,利用人工智能算法的检测结果会有一些误判的地方,需要桥梁检测人员进行人工复核。目前,所能达到的混凝土裂缝的识别的准确率约为80%,仍具有较大提升空间。
猜你喜欢
今日农业(2022年3期)2022-06-05
河北果树(2021年4期)2021-12-02
今日农业(2021年8期)2021-11-28
烟台果树(2021年2期)2021-07-21
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
今日农业(2020年19期)2020-11-06
上海公路(2019年3期)2019-11-25
福建基础教育研究(2019年10期)2019-05-28
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23