
基于CNN的雷达航迹分类方法
2023-12-04 10:01窦贤豪田开严张鹏达
舰船电子对抗 2023年5期
汪 浩,窦贤豪,田开严,张鹏达
(中国船舶集团有限公司第八研究院,江苏 南京 211153)
0 引 言
目标识别是当前研究的热点,传统的雷达目标判别往往依靠人工,需耗费巨大的人力与物力。尤其在复杂环境下,目标数量较多时,人工判别的效率低下,研发智能识别系统的需求越来越迫切[1]。
雷达目标识别领域已有多项研究,如文献[2]建立了空中目标微多普勒运动的理论模型,结合根据理论模型仿真产生的仿真数据和窄带雷达录取的实测数据,分析了目标微多普勒调制特性的差异,利用微多普勒调制的差异来实现空中目标的分类。文献[3]利用回波时域幅度调制信息的幅度偏差系数作为调制特征,提出了一种最近邻分类器的设计方法实现分类。但是航迹级识别的相关文献较少,缺乏有效的应用。
航迹级识别可直接利用的信息较少,想要达到好的识别效果,需要雷达自身有良好的探测性能、信号处理和数据处理能力,给出的航迹数据足够准确。航迹识别还依赖于当地环境,例如道路、海域、鸟群节律,以区分车辆、船舶、飞鸟等特定目标,这需要一定的工作量。但它也有自身独特的优势,航迹级识别的工程实现相对简单,软件的通用性、可移植性非常好,只需要雷达给出目标航迹信息就能应用。航迹级识别还可以作为其他识别手段的补充措施,与微动特性识别、电侦、红外或者光电识别相结合,可达到更好的识别效果[4]。它对于民航、直升机等稳定目标的识别准确率也较高。如何区分具有相似航迹的不同目标,是较大的难点,可以根据回波幅度、目标雷达截面积(RCS)等进行补充。
1 雷达航迹分类
在某型雷达的实际探测中,典型的目标航迹有5类:无人机、飞鸟、直升机、民航飞机和其他不明目标(包含地杂波、车辆及行人等)。在实际探测中发现,民航和直升机往往高度较高、速度较快,在雷达探测空域内基本做直线或简单的曲线运动。而“低慢小”目标及地杂波的识别,仅靠人工判别相当困难,它们的航迹较为复杂,变化频率快,航迹数目较多。本研究实测了一部分飞鸟与无人机的航迹数据,航速对比见图1。
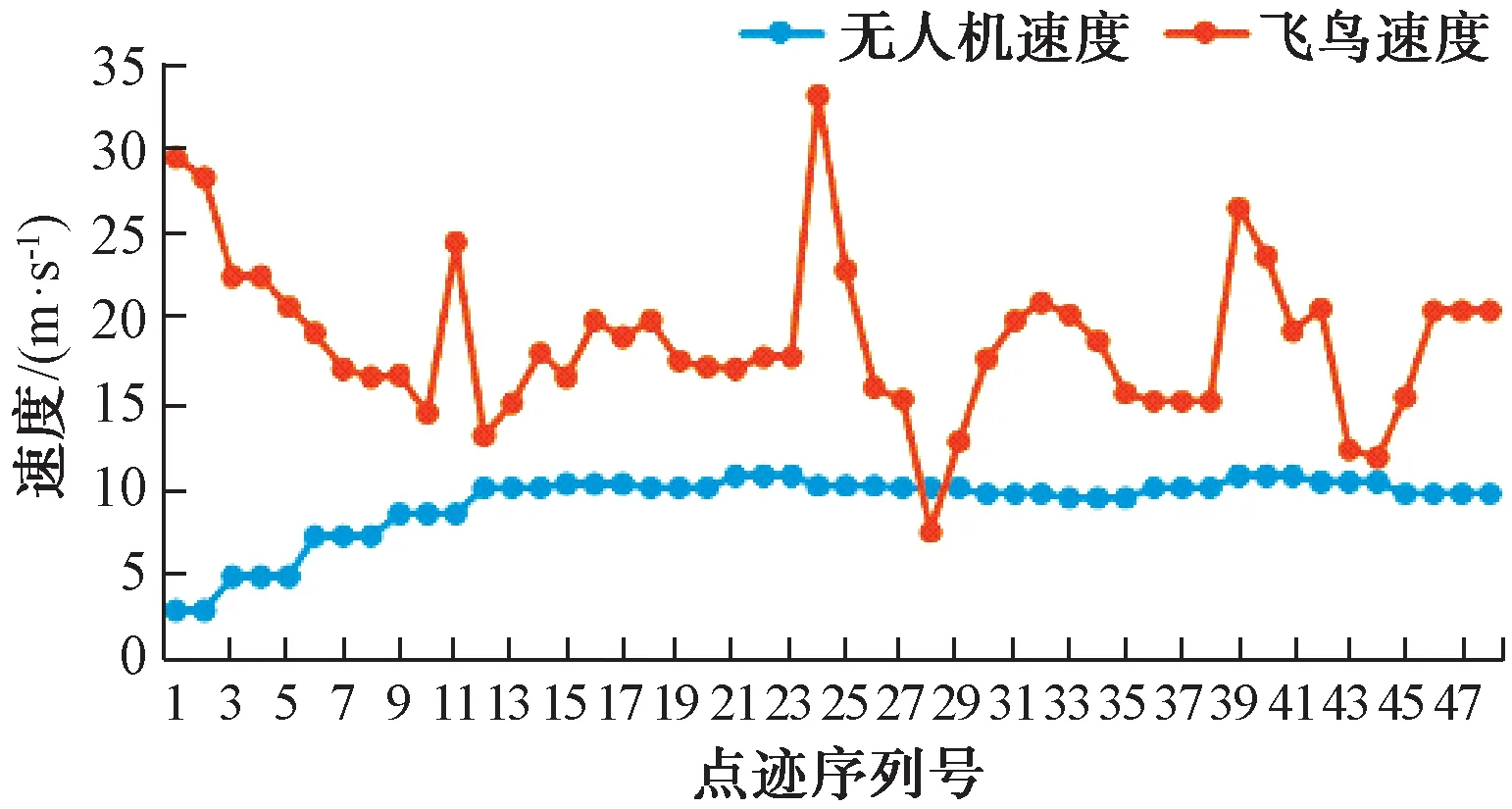
图1 无人机与飞鸟航速对比
两者的运动学特征存在着一定差异,雷达所探测的无人机数据相对稳定,而鸟类数据波动较大。对于无人机做复杂的高机动、无规律运动情况,本文暂不予考虑。其他不明目标的航迹与“低慢小”等空中目标的航迹差别较大,在回波幅度、高度等参数上的波动更为明显,尤其地物杂波的各项参数往往呈无规律的波动。
以上5类目标的航迹各有其特征,在运动学上有一定差异。雷达所给出的目标批号信息的差异性使得应用神经网络进行目标判别成为一个有效途径。在工程应用中,目标的分类阈值需要通过人工标记的方法进行准确的验证和设定,确保算法的识别效果。
2 基于CNN的航迹分类识别
2.1 数据预处理
数据集的构建:目标分为5类,包括无人机、鸟、民航、直升机、其他目标(包含地物杂波、车辆等)。雷达所上报的目标航迹信息通常是不稳定的,需要人工或者在代码中滤除不稳定数据,保留准确部分,保证数据集的准确性。

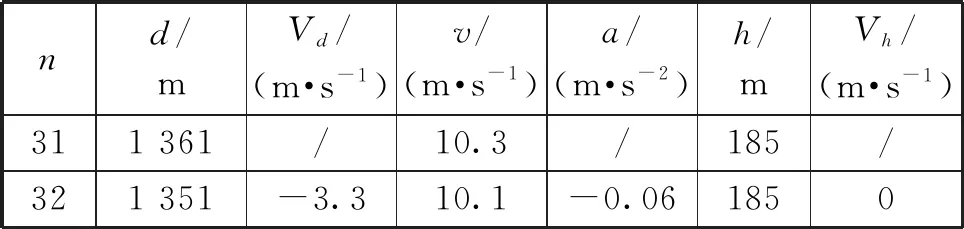
表1 无人机航迹原始数据
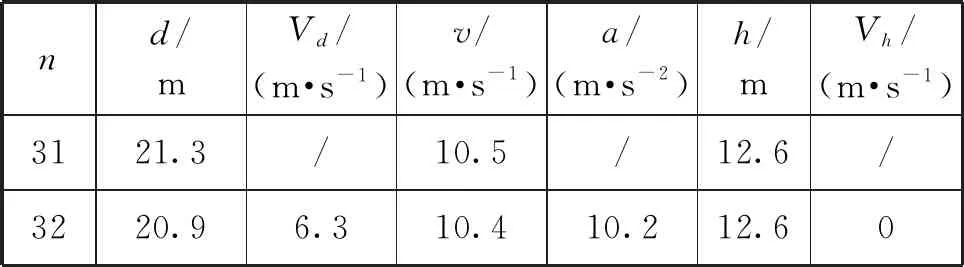
表2 对数处理后的数据
2.2 ResNet模型构建
基于运动学特征的雷达航迹分类问题本质上是一个时间序列分类问题,本文不将航迹转化为图像进行处理,只需采用一维卷积神经网络[6]。ResNet残差网络常用于图像分类检测任务,将其中的二维卷积改为一维卷积,则可很好地应用于雷达航迹分类。在卷积块间增加残差连接,可以将全卷积网络(FCN)扩展为深层网络结构[7],如图2所示。
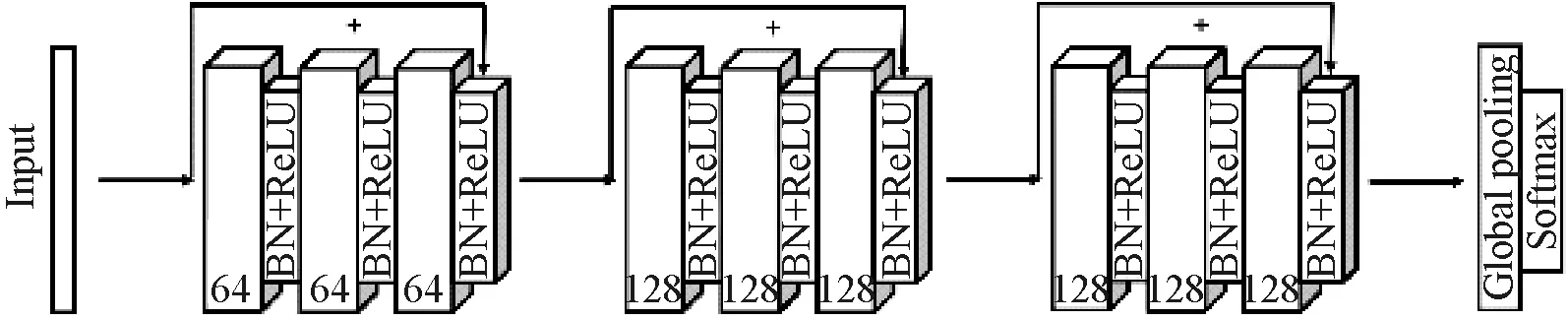
图2 残差网络结构
卷积块包括一维卷积层、批量归一化层和激活函数,一维卷积层用以提取数据的局部特征,卷积后经由批量归一化层与激活函数完成非线性变换:
(1)
式中:*为卷积符号;x为输入向量;W为卷积核的权值矩阵;b为偏置向量;BN为批标准化函数;ReLU为激活函数;H1、H2、H3为中间运算结果。
3个卷积块组成全卷积网络。航迹序列为多变量序列,卷积核的维数选择与其维数相同。残差块的滤波器数量分别为64、128和128,可以表示为:
(2)
式中:h1、h2、h3、h4为中间运算结果。
采用全局平均池化层(GAP)取代全连接层,传统的卷积神经网络常用全连接网络降维,但全连接层在特征降维过程中的参数量过大,训练速度降低且容易产生过拟合。采用全局平均池化的降维方法可以极大地降低参数量,防止过拟合,有:
h=GAP(h4)
(3)
式中:h为全卷积网络的输出。
采用交叉熵代价函数来定义损失值,当损失值越大时,调整梯度就越大,训练速度就越快。激活函数为Softmax,用于航迹多分类的输出。由GAP组成最后的特征向量,送入Softmax中进行计算,预测出当前目标各类型的置信度Y:
Y=Softmax(h)
(4)
2.3 连续识别策略
为了取得良好的识别效果,还需要考虑以下策略。
(1) 单次识别:以上CNN模型的输入维度为固定值,例如每k个航迹点识别一次信息,对于一条包含N个点的目标航迹,每经过k个航点,都向神经网络中输入一次k×5维的矩阵,得到一次识别结果,因此总共得到N-k+1个单次识别结果。
(2) 全局判定:仅采用单次识别,取置信度最高的目标类型,会导致同一个目标的识别结果可能不停变化(由于每k个点重新识别一次,而雷达的探测结果并非总是稳定的)。为了尽量保持识别结果稳定,需要考虑全局策略。对于N个点的目标航迹,历次单次识别累计概率的最大值为:
(5)
式中:k为单次识别所需的航迹点数;i为目标类型的序号;Pij为在第j次单次识别中,Softmax函数所给出的目标类型为i的概率。
Psum所对应的目标类型即为全局判定的类型。
(3) 局部判定:由于雷达航迹的不稳定,一条航迹不一定会对应同一个目标,可能会关联到另一种目标,因此需要考虑目标类型发生变化的情况。局部判定包含2种策略:①在近期的数个航点中,回波幅度为0的航点占比过高,则立刻判定为“其他”。②当一个目标的单次识别结果持续为一种新的目标类型,则认为已经从旧的目标关联到了新的目标,立刻判定此目标类型,并且清空所有历史信息。
局部判定在策略中的优先级高于全局判定。
(4) 异常惩罚:航迹中存在推测点以及异常点,通常这些点的回波幅度为0,或者航迹信息中出现异常值(如航速过高、高度异常等)。另外,航迹末尾存在外推数据,外推数据的回波幅度为0。针对以上航点,给出2种惩罚策略:①航点不送入神经网络,当前的单次识别结果判为“其他”,识别概率写一个固定的惩罚值。②统计整条航迹的异常点比例,当达到一定的百分比后,强制判定目标类型为“其他”(在全局判定的时候实现)。
因此,目标的连续识别策略如图3所示。
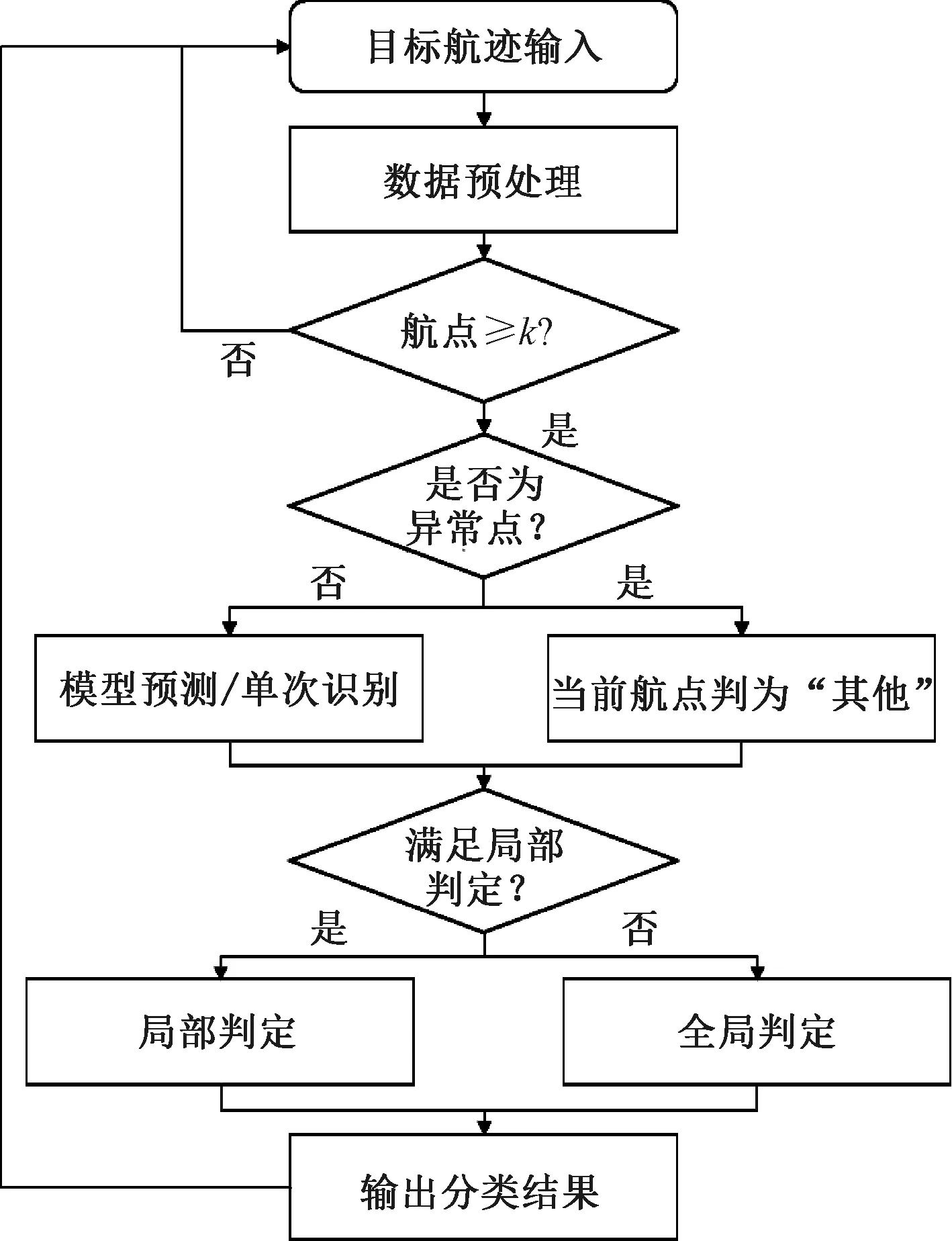
图3 连续识别策略
3 模型训练与雷达实测
3.1 模型训练
本文采用某型雷达实测获得的目标航迹数据,飞行过程中的机动运动较少。数据集规模如表3所示。
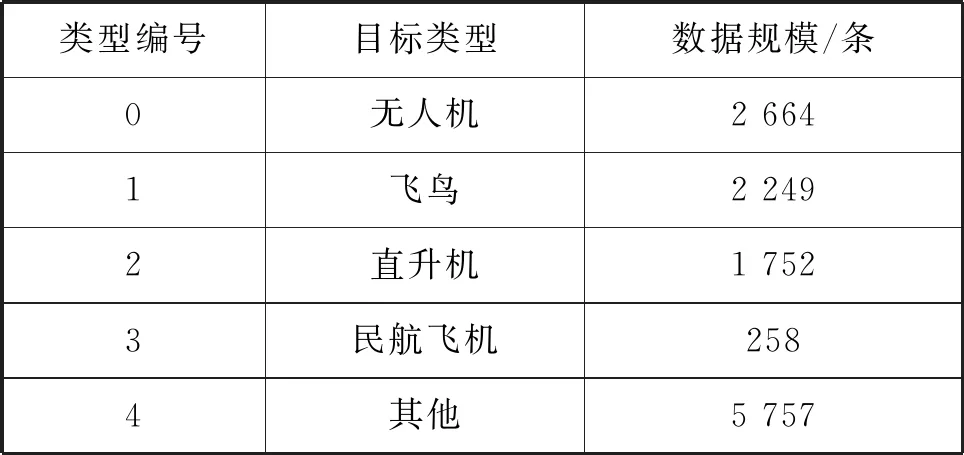
表3 数据集规模
取优化器为SGD优化器,学习率为1e-5,学习率衰减为1e-6,取数据集中的10%为验证集,迭代600次,模型训练结果见图4。
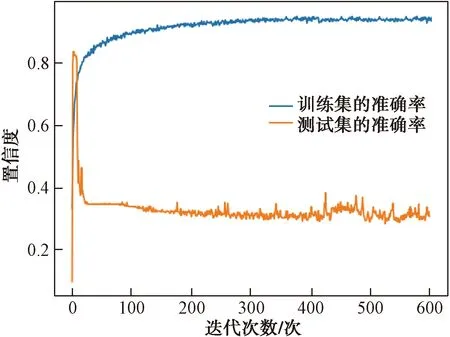
图4 SGD优化器训练结果
测试集的准确率不到40%,反复测试后结果仍不理想,改用Adam优化器重新训练,迭代1 000次,结果如图5所示。
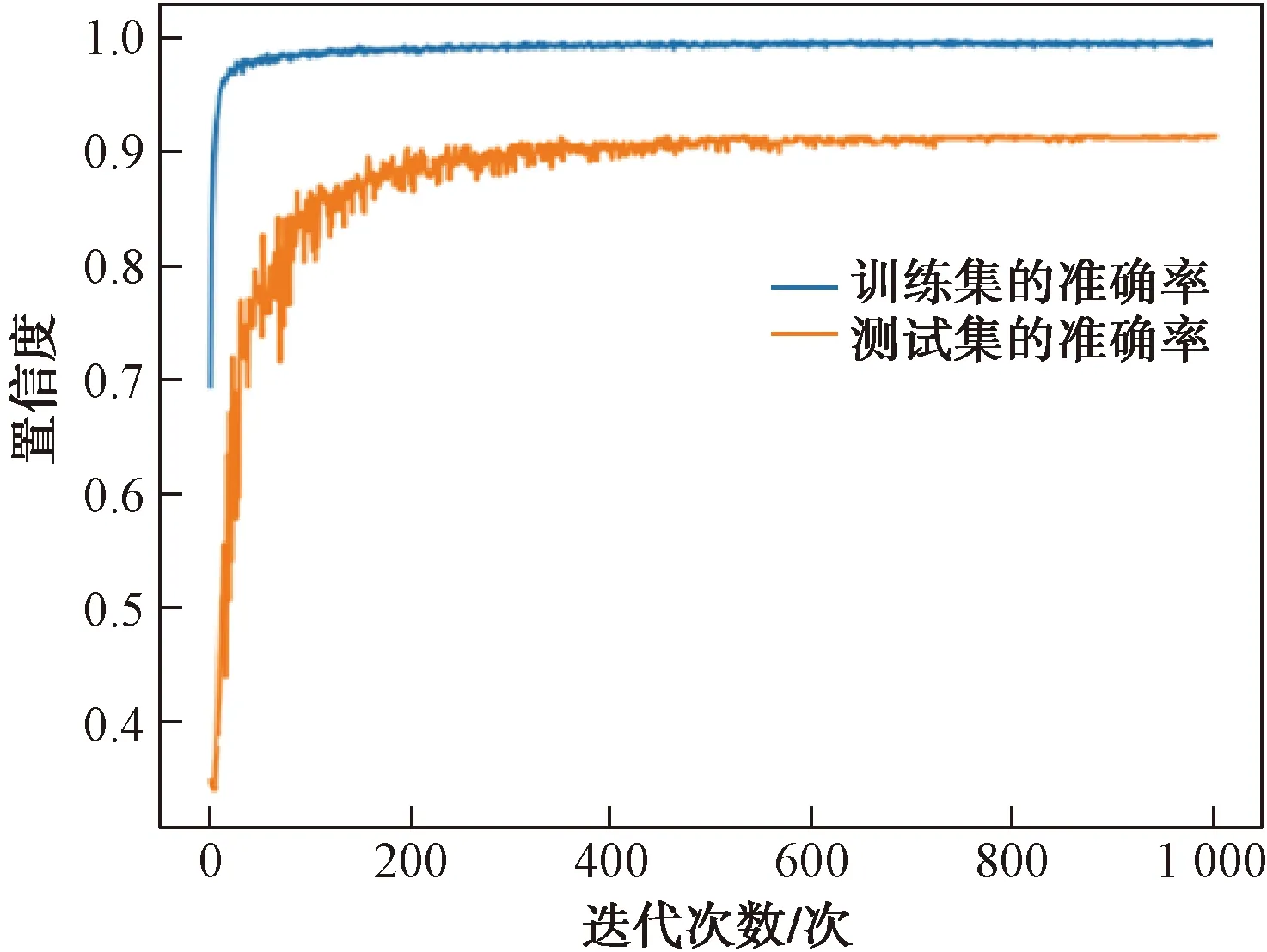
图5 Adam优化器训练结果
训练集的准确率达到98%,测试集准确率收敛于90%。将该模型应用于实际探测,截取部分探测与识别数据见表4~表6。
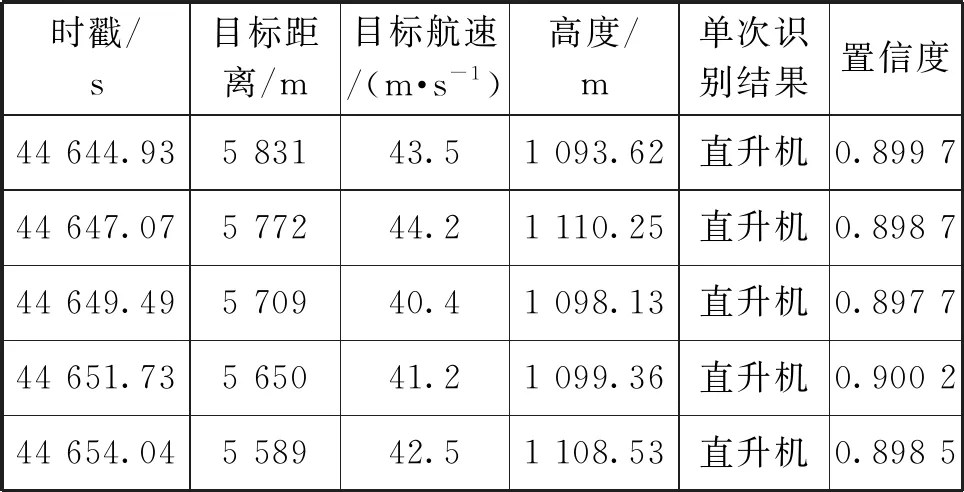
表4 直升机数据及识别结果
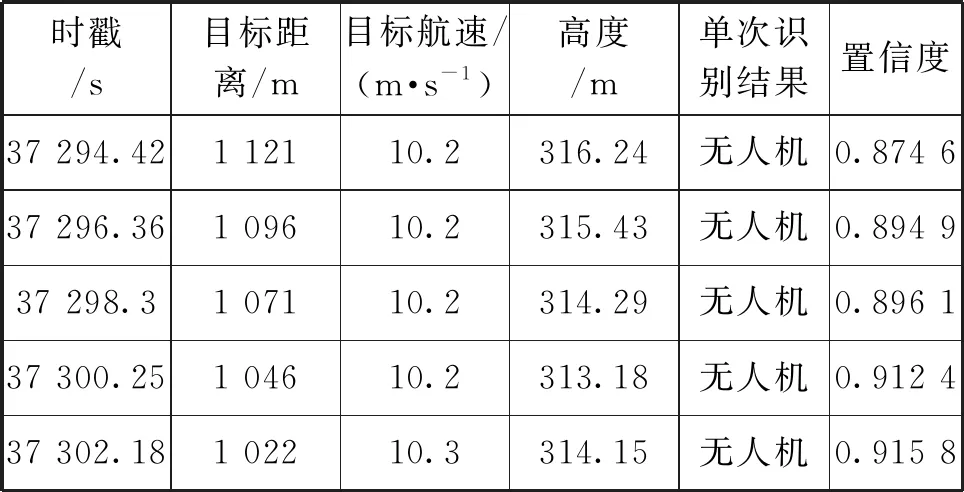
表5 无人机数据及识别结果
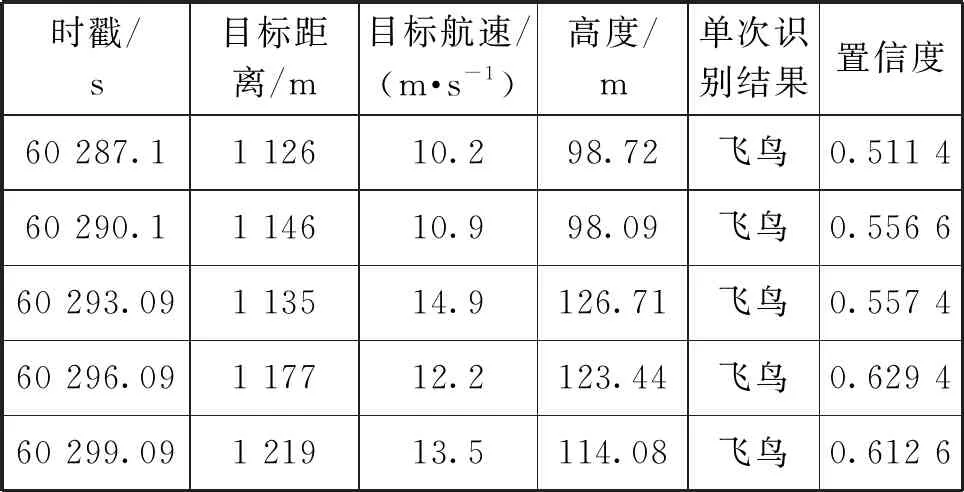
表6 飞鸟数据及识别结果
模型对于民航、直升机和稳定飞行的无人机的识别准确率较高,置信度在0.85以上,但是也存在目标类型误报的现象,例如有部分鸟类航迹被误判成无人机等。当飞鸟航迹非常稳定,置信度向无人机靠拢;当飞鸟航迹波动变大,置信度向“其他”靠拢。典型的飞鸟识别数据见表6,其中对飞鸟的置信度为0.5~0.6,此时对无人机的置信度为0.1~0.2。
3.2 连续识别策略应用
在某机场架设了雷达进行探测,某日单次识别的民航航迹如图6所示(左上角设置了静默区域)。
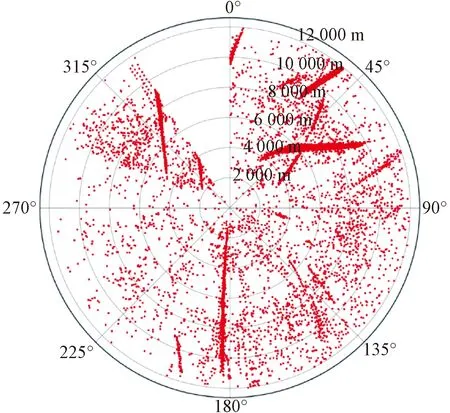
图6 民航单次识别结果
由于民航在起降阶段的速度和高度较低,和鸟类的航迹有一定重叠,在当日的单次识别结果中,有很多鸟类的飞行点迹和一部分的杂波剩余被误判为民航。图6中的识别结果较为混乱。应用连续识别策略,增加局部判别和异常惩罚,继续采集数据,某日下午民航识别结果如图7所示。
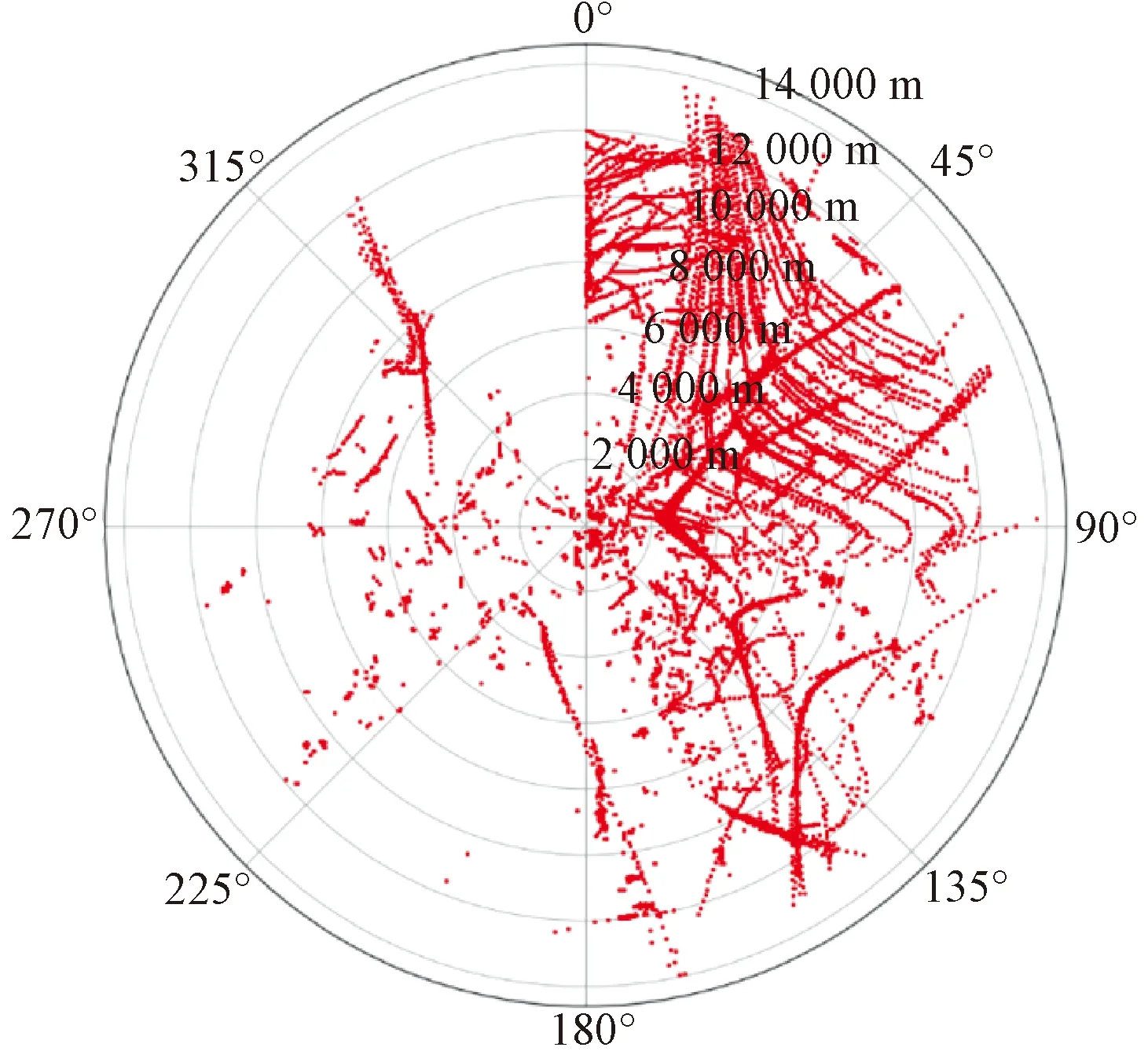
图7 民航识别结果2
由图7可见识别结果得到了明显改善,但仍存在部分孤立的杂散点迹,经检查其航速和回波幅度异于民航,将这类数据在异常惩罚中加以限制,再次采集数据进行民航识别,如图8所示。
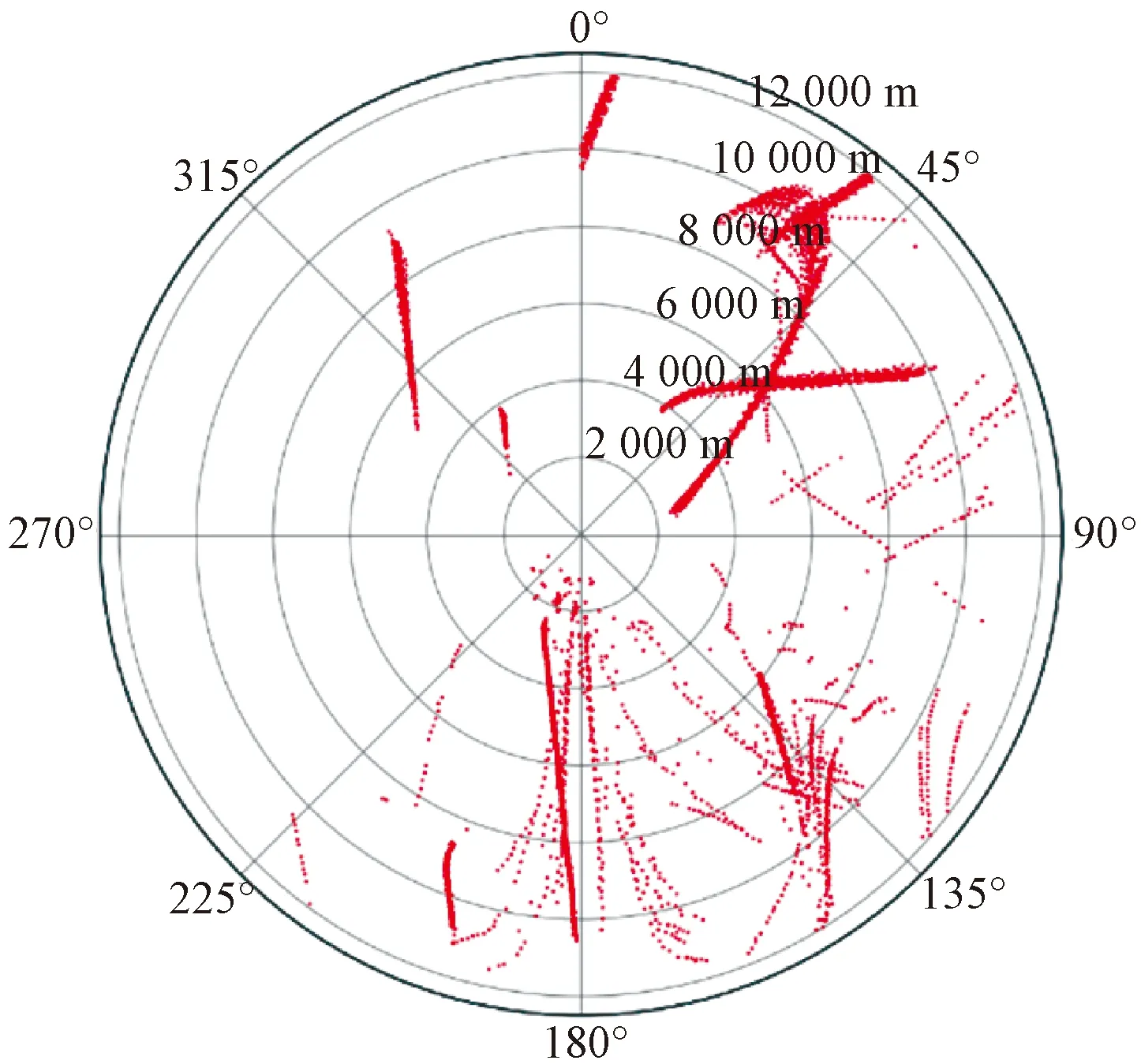
图8 民航识别结果3
图8中的杂散点迹基本得到抑制,并且民航航迹也被较好地保留,能和飞鸟数据有效区分。
4 结束语
本文基于实测的雷达目标航迹数据,搭建了ResNet网络,实现了对目标航迹的检测与识别。实验表明,基于卷积神经网络的航迹级目标分类方法能够有效应用。在未来的工作中,会进一步研究无人机机动变化情形,以及鸟类和飞行器更有效的辨别方法。
猜你喜欢
核科学与工程(2021年4期)2022-01-12
心声歌刊(2020年5期)2020-11-27
青年歌声(2019年12期)2019-12-17
计算机应用(2018年5期)2018-07-25
北京航空航天大学学报(2017年7期)2017-11-24
小溪流(画刊)(2016年11期)2017-01-05
北京航空航天大学学报(2016年6期)2016-11-16
萤火(2016年7期)2016-07-19
小说月刊(2015年10期)2015-12-16
轴承(2015年2期)2015-07-25
