
智能巡检机器人在焦化系统中的应用
2023-11-30 04:45李旭森
机械管理开发 2023年10期
李旭森
(潞安焦化公司,山西 长治 046032)
0 引言
近年来,随着焦化行业自动化水平的逐步提升,“机械化替人、自动化减人”已成为当前发展主流,最终实现“高产高效、少人无人”[1]的企业建设目标。焦炉加热交换系统作为炼焦作业的核心系统,其炼焦炉的加热煤气管道、废气开闭器布置一直是安全巡检的重中之重。目前,焦炉加热交换系统主要依靠人工巡检,不仅巡检劳动强度大,而且巡检区域属于一级防爆区,存在较大的安全风险。主要存在以下特点:现场跟踪空间狭小,环境复杂,人工巡视存在较大隐患;人工巡检存在检查频率低,间隔时间长,设备正常运行时无法有效巡检;人工巡检具有一定主观性,数据缺乏参考意义。
因此非常有必要引入智能巡检机器人及配套运维管理系统,实现对焦炉系统核心单元的智能化、集约化的统一巡检[2],提高焦化系统安全管控水平。
1 现场概况
唐山首钢京唐西山焦化有限责任公司为山西焦煤集团下属生产企业,焦化产能60 万t。为进一步提升现场动态管控能力,该焦化厂计划在焦炉地下室、烟道走廊内配置固定轨道机器人自动巡检,实现对上述区域内图像、声音、温度的信息采集、管道气体泄漏检漏以及对管道温度、压力、流量等参数的实时监测。分别布设两部机器人设备,第一部机器人位于焦炉地下室交换旋塞搬把的侧面,该处机器人吊轨形式运动;第二部机器人位于焦炉烟道走廊操作台下方,其现场布置如图1 所示。

图1 焦炉地下室和烟道走廊断面(单位:mm)
2 主要功能设计
2.1 焦炉巡检机器人功能设计
1)本项目焦炉巡检机器人采用JNX12 防爆型智能巡检机器人[3],可通过操作人员设定到达指定检测位置,对现场的各类图像、声音、温度和气体浓度等数据进行实时采集,经配套管理系统分析后提出智能决策方案,自动判断设备故障位置及故障原因,及时发现并自动处理故障问题,大大降低生产过程中的非正常停机时间,避免事故扩大化。
2)在续航工作方面,JNX12防爆型焦炉巡检机器人采用无线充电、无线数据传输方式,能够实现全天24 h 无休止巡检工作,可完全代替巡检工,达到无人值守的目的。
3)巡检机器人具有体积小、抗腐蚀性等特点,能够进入空间狭小及有毒有害危险区域。
2.2 焦炉巡检机器人结构组成
JNX12防爆型智能巡检机器人结构如图2 所示。防爆型智能巡检机器人系统主要依托无线充电、无线数传等技术,通过驱动轮组和行走轨道进行灵活移动,再通过远程控制端和传感器移动平台对整个轨迹内的声音、图像、气体等传感信号实时采集、判断和回传,实现智能移动巡检。其具备以下特征:

图2 JNX12防爆型智能巡检机器人结构
1)人工智能学习。巡检机器人系统能够利用计算机模拟人脑思维的信息处理方式,借助系统大数据库进行认知,不断自主学习提高现场的实用性和高效性。
2)本安防爆设计。巡检机器人本体采用本安型设计,电气可靠性和稳定性更高,能够实现现场超长时间巡检,保证运行传输效率。
3)多地形适应。巡检机器人占地范围小,路径相对固定,按照指定的路线运动,不会对其他人员及设备运行造成影响。
2.3 移动巡检本体设计
多参数移动巡检本体是本系统的核心,其主要结构如图3 所示。多参数移动巡检本体包括中央控制模块(RFID 读写头)、行走模块(驱动单元、底盘单元里程枪和安全触边)、多参数采集模块(红外热像仪器、高清相机、补光灯、雨刮器和光电传感器)、充电控制模块(自主充电装置)、通信模块(云台单元)等模块单元[4]。
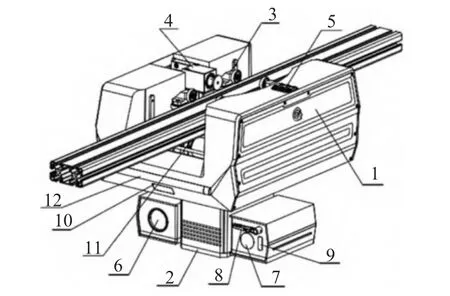
图3 多参数移动巡检本体结构
2.3.1 本安型移动巡检子站
本安型移动巡检子站通信传输采用5G 信号通信系统,传输速度快,效率高,能够将移动监测数据实时传输到集控中心。
2.3.2 隔爆兼本安型电源箱
多参数移动巡检本体采用12 V 本质安全型直流电路,通过5 Ah 锂电池和分布式充电点结构装置进行供电,具备较好的续航能力。
2.3.3 轨道系统
多参数移动巡检本体采用长6 m、经过特殊防锈处理的10 号工字钢做巡检装置轨道,能够实现巡检区域的全覆盖。
2.3.4 后台软件系统
巡检本体的后台软件系统采用C/S、B/S 和手机APP 客户端三端互通模式,外部接口齐备,模块化架构清晰,采集数据通过WEB 服务器对外接口向外共享,能够对整个机房内各类辅助设备进行综合管理和实时控制。
3 现场实施
从焦炉地下室向烟道走廊连续铺设巡检机器人行走轨道,1 台机器人沿轨道运行,负责对气体浓度、阀门闭合、设备表面温度巡检、仪器仪表数据读取和异常故障等进行动态巡检。铺设示意图如图4 所示,在轨道的首部和尾部放置充电桩,在整个运行轨道处均匀分布通信基站,确保网络覆盖到整个运行区域,保证监测控制机器人运行。
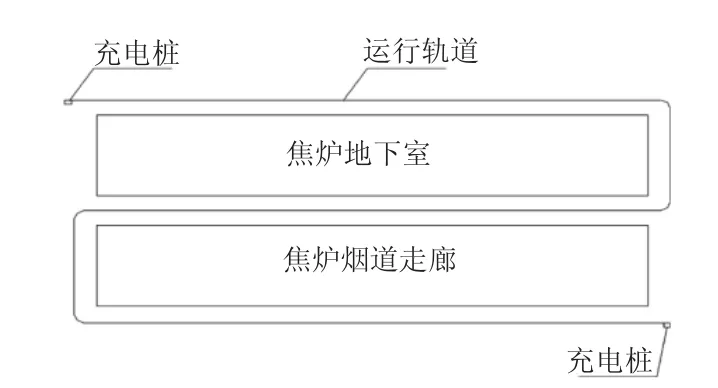
图4 巡检机器人行走轨道铺设
在焦炉地下室铺设第一条工字钢轨道,在烟道走廊铺设另一条工字钢轨道,布置两台机器人分别对设备表面温度巡检、气体浓度、仪器仪表数据等进行动态巡检。铺设示意图如图5 所示,充电桩放置在轨道首部,在整个运行轨道处均匀分布通信基站,确保网络覆盖到整个运行区域。经过现场实施表明,焦炉巡检机器人能够通过驱动轮组和行走轨道进行灵活移动,整个轨迹内的声音、图像、气体等传感信号能够实时采集、判断和回传,实现智能移动巡检。

图5 巡检机器人工字钢轨道铺设图
4 结语
本项目对焦炉巡检机器人主要部件设计进行分析,并结合现场情况对多参数移动巡检本体、移动巡检子站、隔爆兼本安型电源箱、轨道系统和后台软件系统进行了配套设计,并进行了现场实施。结果表明,焦炉巡检机器人能够通过驱动轮组和行走轨道进行灵活移动,关键位置的声音、图像、气体等传感信号能够有效实时采集、判断和回传,实现智能移动巡检,满足焦炉系统“无人化、少人化”的工作要求。
猜你喜欢
哲学分析(2023年4期)2023-12-21
山东冶金(2022年3期)2022-07-19
建材发展导向(2019年10期)2019-08-24
知识经济·中国直销(2017年8期)2017-09-05
当代化工研究(2016年9期)2016-03-20
新疆钢铁(2016年3期)2016-02-28
文学教育(2016年27期)2016-02-28
舰船科学技术(2016年1期)2016-02-27
山东冶金(2015年5期)2015-12-10
图书与情报(2013年1期)2013-11-16
