客车车道保持控制策略研究
2023-11-30 09:31:20吴浩常圣王志伟王法龙温长青安徽安凯汽车股份有限公司
安徽科技 2023年10期
文/吴浩 常圣 王志伟 王法龙 温长青(安徽安凯汽车股份有限公司)
一、背景
《机动车运行安全技术条件》(GB 7258—2017)中第4.17.3 条要求车长大于11 米的公路客车和旅游客车应装备符合标准规定的车道保持辅助系统;《商用车辆车道保持辅助系统性能要求及试验方法》(GB/T 41796—2022)自2023 年5 月1 日起实施,明确了客车的车道保持系统及功能要求。公路客车作为客运的主力军,在高速公路长途行驶过程中驾驶员极易产生驾驶疲劳,这是产生交通安全隐患的重要原因,因此客车主动安全系统的开发极其重要。
目前的车道保持功能,大多数是持续控制整车横向运动,从而达到车道保持的功能,但这种控制方式使得驾驶员的驾驶体验较差,原因在于驾驶员明显感觉方向盘“不在自己手上”。相反,驾驶员必须在功能开启后持续关注,并未起到减少驾驶员疲劳及辅助驾驶员操作的作用。因此,本文提出了一种车道保持的控制策略,主要通过车道偏离报警(LDW)、车道偏离抑制(LDP)及车道居中控制(LCC)功能融合,使整车的车道保持功能在出现车道偏离时才会激活,方向盘才会被系统控制。也就是说,在车辆正常行驶时,系统不激活,方向盘自由灵活,驾驶员的驾驶体验不受干扰;直到整车偏离车道,或驾驶员因注意力不集中等情况未对整车进行控制动作,系统才会介入,辅助车辆在车道内行驶,以确保安全。
二、控制策略架构与实现
1.系统功能及软件架构
系统电气架构包括摄像头、惯性传感器、控制器、转向执行器(EPS)、人机交互设备(HMI)等。其中,摄像头用于识别车道线、判断自车和车道线的相对位姿关系;惯性传感器用于提供车身横摆角速度信息;控制器用于实现融合感知和智能决策;转向执行器用于控制车辆实现期望的横向运动;人机交互设备用于与驾驶员交互,实现系统设置、信息提示等功能。当驾驶员无意识偏离车道线时,系统可以对方向盘施加角度指令,控制车辆以辅助驾驶员将车辆保持在当前车道内行驶,当车辆回到车道线后,可以保持居中行驶一段时间。同时对驾驶员告警,提醒其及时接管车辆。
软件分别实现环境感知、智能决策、执行控制功能,如图1 所示。感知融合模块:接收传感器信息,输出系统所需道路信息、驾驶员信息、车辆信息;智能决策模块:根据获得的人、车、路相关信息,对系统状态进行评估,激活报警、转向干预等控制策略;执行控制模块:根据接收的期望指令、系统状态等,进行转向控制、人机交互控制、人机共驾控制等。
2.控制策略
系统根据获得的道路信息、驾驶员信息、车辆信息等,建立驾驶员“单点预瞄”与车路跟随系统共同构成的“人- 车- 路”闭环控制系统模型,建立整车与车道线的坐标关系,根据车速确定合适的预瞄点,从而得到车辆期望的坐标位置即获得车辆期望路径;结合转向执行器的响应滞后、转向系统结构和传动比、车辆转向灵敏度、车辆稳态响应等计算出最优方向盘转角,即既不会修正太慢又不会导致车辆急剧震动的合理转角;并对系统状态进行评估,激活报警、转向干预等控制策略,输出执行器控制指令及相关系统状态信息。
根据跨道时间和跨道距离确定系统进入的逻辑状态,核心是车道偏离报警(LDW)策略、车道偏离抑制(LDP)策略、车道居中控制(LCC)策略的进入和退出,如图2 所示。在路径期望和路径跟踪的过程中,根据整车响应情况分级控制,逐渐加大控制力度和角度,给予驾驶员一个心理缓冲期以便接管控制车辆。在退出控制时,确定车辆姿态,计算合理的回正命令,保证车辆与车道的位置,实现车道内行驶。
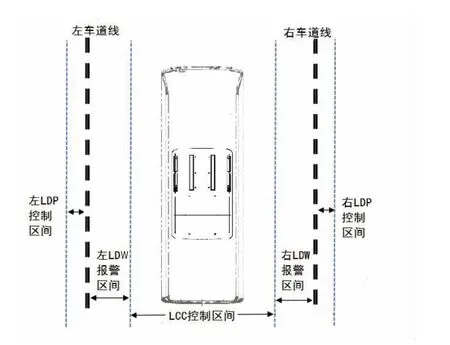
图2 系统功能说明图
(1)车道偏离报警(LDW)策略:在车辆发生无意识偏离,且到达报警线时,系统应能够触发车道偏离报警(LDW)功能,发出报警信号。典型的车道偏离报警过程如图3 所示,该过程中涉及的控制策略主要包括:当前系统激活状态判断;当前偏离状态检测与判断;报警进入时机控制;报警退出时机控制;抑制控制;报警指令计算等。
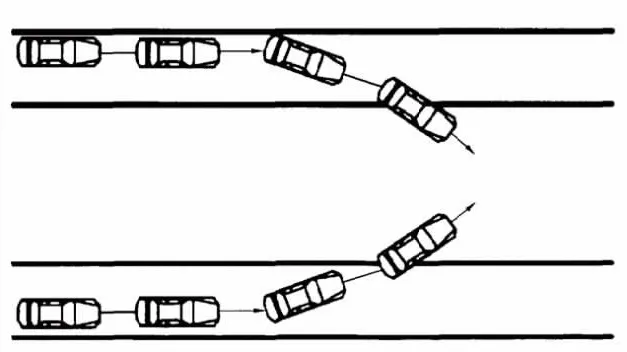
图3 车道偏离报警示意图(左侧、右侧)
(2)车道偏离抑制(LDP)策略:当系统发出报警信号,而驾驶员仍未主动接管转向控制,导致车辆继续偏离车道时,将会触发车道偏离抑制(LDP)功能。车道偏离抑制功能的作用是通过施加转向干预,辅助驾驶员将车辆控制在车道内。典型的车道偏离抑制过程如图4 所示,该过程涉及的控制策略主要包括:当前系统激活状态判断;当前偏离状态检测与判断;纠偏进入时机控制;纠偏退出时机控制;抑制控制;路径规划与路径跟踪;期望转角控制等。

图4 典型的车道偏离抑制(左侧、右侧)
(3)车道居中控制(LCC)策略:当系统通过车道偏离抑制控制功能辅助车辆进入车道内,系统触发车道居中控制(LCC)功能。车道居中控制功能可以辅助整车始终行驶在车道的中心,确保整车平稳行驶。该过程涉及的控制策略主要包括:当前系统激活状态判断;当前居中状态检测与判断;居中进入、退出时机控制;居中功能与纠偏功能仲裁;抑制控制;路径规划与路径跟踪;期望转角控制等。
(4)协同控制:不同行驶工况下,车道偏离报警(LDW)功能、车道偏离抑制(LDP)功能、车道居中控制(LCC)功能可能分别处于不同的工作状态,且均对人机交互界面等执行器进行控制。控制协同模块对上述功能进行系统集成,保证输出指令和系统状态信息符合预期。该过程涉及的控制策略主要包括:当前系统状态仲裁;当前偏离状态仲裁;系统进入时机控制;系统退出时机控制;抑制控制;输出指令仲裁等。
3.系统控制模块切换
系统各控制模块的切换如图5 所示。
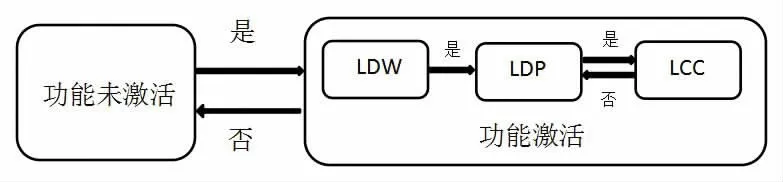
图5 系统控制模块切换
整车在车道内正常行驶,此时系统未激活,当整车偏离本车道处于LDW 报警区间时,系统功能激活,系统开始发出报警提醒驾驶员,若驾驶员未接管车辆或整车未驶回车道而是进入LDP 控制区间,则LDP车道纠偏抑制功能触发,系统根据车辆自身状态、与车道线位置关系、期望路径计算得到整车期望转向角度,通过控制转向执行机构使得整车回到原车道,当整车成功纠偏回到原车道并进入LCC 控制区间时,车道居中功能触发,整车沿着车道中心行驶。待整车稳定或驾驶员开始接管车辆,系统退出功能,等待下一次激活。
三、测试验证
本文选用国内某大型车企客车,外形尺寸为12000 毫米×2550 毫米×3690 毫米,整备质量为12800 千克,总质量为18000 千克,轴距为6080 毫米。试验车辆初始行驶方向与车道线平行,以固定车速20米/秒驶入车道线,车辆中心线与车道中心线偏差不应大于0.2 米。随后,试验车辆偏离本车道,待整车开始偏离时,方向盘处于自由状态,开始记录车辆与车道线位置关系数据、转向控制指令等数据,试验结果如图6 所示。
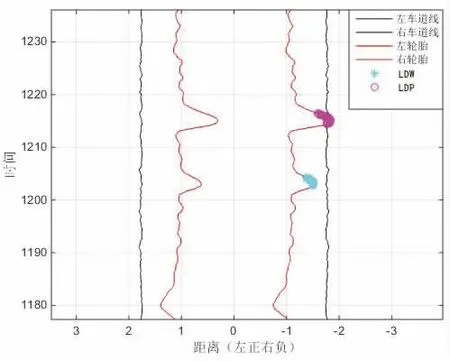
图6 车道偏离试验整车与车道线位置结果
从图6 可以看到,在1201 秒时,车辆偏向右侧车道线,系统触发LDW 报警功能;在1214 秒时,整车偏离出右侧车道线使LDP 功能触发,系统控制整车回到原车道,并触发LCC 功能,整车在原车道内稳定行驶。
横向偏离速度及偏离加速度可以反映整车在横向控制过程中的舒适性,图7 显示了控制过程中整车的横向偏离速度及偏离加速度,偏离速度为0.564 米/秒,偏离加速度为0.8268 米/秒2,系统控制策略有效,整个控制过程平稳、顺畅、舒适。
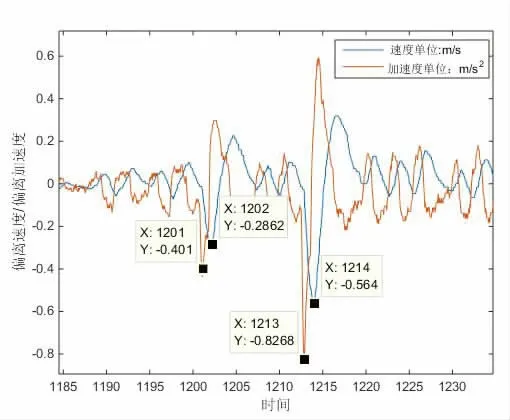
图7 车辆偏离速度/偏离加速度
四、结语
本文针对客车车道保持功能控制策略进行了研究,设计了融合了车道偏离报警(LDW)、车道偏离抑制(LDP)及车道居中控制(LCC)功能的车道保持控制策略,并结合实车测试,测试结果有效证明了所提策略的可行性。该策略可以保证整车车道保持功能正常,且解决了系统功能开启造成的驾乘体验问题,整车控制平稳,转向平顺,驾驶员与乘客驾乘体验良好。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:08
卫星应用(2021年11期)2022-01-19 05:13:02
科学大众(2021年9期)2021-07-16 07:02:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
汽车观察(2019年2期)2019-03-15 06:00:52
汽车观察(2018年12期)2018-12-26 01:05:46
汽车观察(2018年10期)2018-11-06 07:05:32
北京汽车(2017年3期)2017-10-14 02:15:52
中国交通信息化(2015年10期)2015-06-06 06:39:31
噪声与振动控制(2015年4期)2015-01-01 07:08:09