力法去弹性支座多余约束的一种处理方式
2023-11-28 05:54:14吴昊
力学与实践 2023年5期
吴 昊
(西南交通大学土木工程学院,成都 610031)
1 问题的提出
支座一般指连接结构与固定点的装置,结构分析与设计中的支座形式以刚性支座为主,包括固定铰支座、活动铰支座和滑动支座等[1-3],除支座移动因素外,该类支座不允许支承处沿约束方向发生任何位移。实际工程中,某些结构的支座承受载荷时本身会沿约束方向发生有限变形以提供支承反力,计算中将这类支座简化为弹性支座更符合实际,如组合结构中链杆或拉索对梁式杆的约束作用可处理为弹性支座。通过将超静定结构中刚度支座或刚结点简化为弹性支座,还可将弹性支座用于一般超静定结构的内力和位移简化计算[4-5]。
合理去除多余约束是带弹性支座且有多余支座约束结构力法计算的关键,通常可采取撤去或切开多余弹性支座的方式[6],其中,前者相当于解除弹簧活动支点约束,系数和自由项计算可不考虑弹簧变形影响,但由于原结构沿多余约束方向的线位移或弹性转角大小未知,且总是与弹性约束力反向,即力法典型方程等号右边为未知位移,形式上与带刚性支座结构不统一,物理意义也不同;切开弹簧的方式将弹簧分为两部分,利用弹簧切口两侧截面相对位移条件建立力法方程,一方面系数和自由项计算相对复杂,另一方面对于带转动弹性支座的结构,力法典型方程及自由项的意义不直观。可见,以上两种去除弹性支座多余约束的方式均存在一定局限性。
为统一去除支座多余约束的方式,规范力法求解过程,本文针对带弹性支座多余约束结构力法计算提出了一种解除弹性支座固定支点约束、保留完整弹簧作为基本结构一部分的去多余约束思路,并通过与传统方法进行比较,分析了该去弹性支座多余约束方法的优势,可为进一步研究带弹性支座结构动力响应和带弹性结点超静定结构分析等弹性约束计算问题提供参考。
2 弹性支座形式和计算特点
2.1 常见支座形式
图1 给出了结构分析中部分弹性支座的计算简图,按照支承特性可将弹性支座分为两大类:由单弹簧或单弹簧和刚性支座链杆组成的拉压弹性支座(图1(a)~1(c)),以及由两根平行弹簧和铰支座组合的转动弹性支座(图1(d)),其中,图1(c)和图1(d)中的弹性支座均提供3 个约束,支承特性类似固定支座,可看作由固定支座解除某个方向的约束并代之以相应弹性约束得到的半刚性支座。

图1 弹性支座形式
2.2 主要计算特点
弹性支座所提供的约束力或约束力矩与弹簧变形成正比[7],拉压弹性支座和转动弹性支座的约束力(Rk)和约束力矩(Mk)分别满足
式中,Δ和θ分别为相应弹性支座的变形,k和kr分别表示弹性支座沿约束方向发生单位线位移和单位转角时产生的约束反力和约束力矩,即弹性支座刚度系数,该系数为影响结构内力分布的关键参数,通常作为已知条件给出。
带弹性支座且有支座多余约束结构的力法计算中,弹性支座的影响与所选力法基本体系有关,主要体现在力法典型方程建立以及系数和自由项计算等环节。若弹性支座约束为必要约束必须保留时,弹簧变形对静定基本结构内力计算无影响,但系数和自由项计算需考虑弹簧变形引起的刚体位移贡献;若弹性支座约束为非必要约束,一般将弹性支座约束选作多余约束予以解除的基本体系计算相对简便。根据结构特点,可按以下两种方式解除弹性支座多余约束进行计算:(1)撤去弹性支座,将弹性支座变形看作对应刚性支座的位移,把弹性支座问题转化为载荷和支座移动共同作用下刚性支座结构的内力计算,如图2(a)所示结构,解除弹性约束后可进一步利用结构对称性简化计算;(2)保留弹簧作为基本结构一部分,将弹簧看作轴力杆,按照载荷作用下的组合结构进行力法计算。本文对后一种去多余约束方式进行讨论。

图2 弹性支座与刚性支座位移等效示意
3 解除弹性支座固定支点去多余约束
弹性支座的弹簧两端分别通过活动支点和固定支点与杆件和基础相连,为便于利用原结构中弹簧固定支点处已知的零位移条件,提出一种将去多余约束位置选在弹性支座固定支点处并保留整个弹簧作为基本结构一部分的去弹性支座多余约束处理方式,以下选取带弹性支座的超静定梁和刚架结构为例针对两类弹性支座形式进行说明。
3.1 拉压弹性支座
图3(a)为带单弹簧的拉压弹性支座的一次超静定单跨梁,EI为常数,杆长l,弹簧刚度系数k,跨中受一集中力F作用,选取悬臂梁作为力法基本结构,解除弹性支座固定支点约束并以多余约束力X1代替,保留弹簧作为基本结构的一部分,基本体系如图3(b)所示。

图3 带弹性支座单跨超静定梁
利用原结构已知的零位移条件,建立力法典型方程
式中,δ11和Δ1P分别为基本结构中弹簧解除约束点处由于单位多余约束力和载荷单独作用引起的竖向位移,基本结构的M1和MP图分别如图4(a)和图4(b)所示。

图4 基本结构弯矩图
将弹簧看作刚度系数已知的轴力单元,主系数由两部分组成,分别为单位多余约束力作用下梁式杆弯曲变形产生的主位移和弹簧变形引起的位移,可按单位载荷作用下的组合结构位移公式进行计算,如式(4)所示,即由梁式杆单位弯矩图图乘结果与弹性支座柔度系数叠加得到。
具体计算中,轴向刚度为EA的链杆支座也可看作拉压弹性支座。
3.2 转动弹性支座
图5(a)为一带转动弹性支座的一次超静定刚架结构,EI为常数,各杆长均为l,支座转动刚度系数kr,选取简支刚架作为力法基本结构,解除弹性支座中弹簧固定支点A和B处约束,各弹簧与基础完全脱开,保留弹簧作为基本结构一部分,用多余约束力矩X1代替转动弹性支座的约束作用,得基本体系如图5(b)所示。
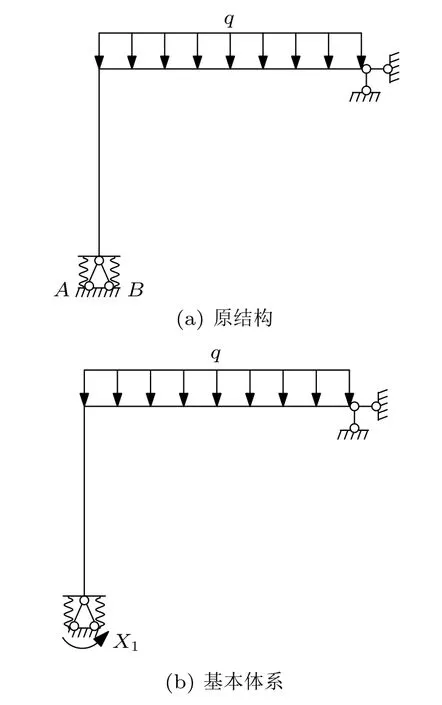
图5 带转动弹性支座刚架结构
利用基本体系中弹簧解除约束点连线沿约束方向转角与原结构中固定支点A和B连线转角相等的位移条件,建立形式与式(3)相同的力法典型方程。原结构弹性支座实际变形以及基本结构由于多余约束力矩和载荷单独作用时弹性支座变形状态见图6,可知,相应的转角均为相对于基础固定点连线的角位移,即绝对角位移,意义直观,便于计算,力法典型方程的建立以及系数和自由项计算均不需考虑原结构中弹性支座实际变形,且主系数δ11同样可由杆件弯曲变形产生的主位移叠加弹性支座柔度系数得到。

图6 转动弹性支座变形状态
由刚性支座支承特性可知,刚性支座多余约束结构的力法典型方程形式及系数和自由项计算不受去约束位置影响,上述去弹性支座多余约束方式同样适用于刚性支座多余约束。以载荷作用下具有一个支座多余约束的超静定结构为例,将刚性支座和弹性支座常见的去支座多余约束方式及相应力法典型方程的形式列于表1 中。

表1 刚性和弹性支座去支座多余约束方式比较
弹性支座的3 种去多余约束方式分别对应不同的位移条件,尽管力法典型方程本质上一致,但区别在于力法的基本体系、典型方程形式和物理意义以及系数和自由项的含义等。其中,解除弹性支座固定支点的方式概念直观,方程形式紧凑、意义明确,系数项与自由项的物理意义以及副系数与自由项的计算等均与刚性支座结构的力法计算完全一致,因而具有一般性。
4 算例分析
例已知EI为常数,k=6EI/(5l3),kr=3EI/l,用力法计算图7 所示结构,并作弯矩图。

图7 带弹性支座连续梁
分析:本题为带两种类型弹性支座的两跨连续梁,2 次超静定结构,基本结构不唯一。
解:(1)基本未知量
选取简支梁作为力法基本结构,以中间弹性支座的竖向约束力X1和转动弹性支座的约束力矩X2作为基本未知量,解除各弹簧固定支点处约束去除弹性支座多余约束并以相应多余约束力代替,基本体系如图8 所示。

图8 基本体系
(2)基本方程
利用原结构中各弹性支座解除约束处已知的零位移条件,建立力法典型方程
(3)系数和自由项计算

图9 单位弯矩图和载荷弯矩图
由图乘法可得:
(4)解力法典型方程
(5)叠加法作弯矩图
由以上叠加公式分别计算各杆杆端弯矩,并采用叠加法逐杆作弯矩图,最终弯矩图如图10所示。

图10 弯矩图
5 小结
(1)将弹性支座多余约束的去约束位置选在弹簧固定支点处,便于利用已知的零位移条件建立形式统一、意义明确的力法典型方程。
(2)力法方程的系数和自由项均表示基本结构中弹性支座解除约束处的绝对位移,与刚性支座情况一致,弹簧支座变形的影响限于主系数计算,即以弹性支座柔度系数形式与杆件弯曲变形产生的主位移叠加。
(3)解除支座固定支点的去多余约束方式对于刚性支座和弹性支座均适用,有利于统一不同支座形式去多余约束位置、规范力法求解过程和提高计算效率。
猜你喜欢
工业安全与环保(2022年3期)2022-03-21 01:30:00
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19 08:51:52
小学阅读指南·低年级版(2020年11期)2020-11-16 07:00:53
城市道桥与防洪(2019年5期)2019-06-26 00:56:00
新高考·高一物理(2016年10期)2017-07-07 12:17:11
快乐语文(2016年7期)2016-11-07 09:43:55
中学课程辅导·教学研究(2016年35期)2016-04-10 07:45:26
文学少年(有声彩绘)(2016年11期)2016-02-28 17:52:30
城市道桥与防洪(2014年4期)2014-02-27 07:25:54
铁道建筑(2011年12期)2011-07-30 08:59:02