
基于高速公路物联传感动态数据的三维可视化研究
2023-11-22 10:46:17翟锐雷志刚
现代信息科技 2023年19期
翟锐 雷志刚

摘 要:该研究运用三维GIS技术、倾斜摄影技术、三维可视化展示与交互技术等,打造一套能够对高速公路物联传感动态数据进行空间定位、空间分析的可视化地理信息平台。基于高速公路真实地形地貌在三维空间中直观展示物联传感动态数据并进行动态分析,提升高速公路数字化和智能化管理水平,为相关人员提供基于可视化场景的辅助决策,提升高速公路管养工作效能,为高速公路物联传感动态数据的三维可视化提供一定的参考借鉴。
关键词:高速公路;物联传感;桥梁立柱位移监测;桥下空间视频监控;GIS WEBGL;Ceisum;视频融合
中图分类号:TP391.4 文献标识码:A 文章编号:2096-4706(2023)19-0185-06
Research on 3D Visualization Based on Expressway IOT Sensing Dynamic Data
ZHAI Rui1, LEI Zhigang2
(1.Jiangsu Yanjiang Expressway Co., Ltd., Nanjing 210016, China;
2.Jiangsu Yearning Engineering Technology Group Co., Ltd., Nanjing 210019, China)
Abstract: This study utilizes 3D GIS technology, oblique photography technology, 3D visualization display and interaction technology, etc. to create a visual geographic information platform that can perform spatial positioning and analysis of expressway IOT sensing dynamic data. Based on the real terrain and topography of highways, IoT sensing dynamic data is visually displayed and dynamically analyzed in 3D space, improving the digitalization and intelligent management level of highways, providing relevant personnel with auxiliary decision-making based on visual scene, improving the efficiency of highway management and maintenance work, and providing certain reference for the 3D visualization of IoT sensing dynamic data of highways.
Keywords: expressway; IOT sensing; bridge column displacement monitoring; space video monitoring under the bridge; GIS WEBGL; Ceisum; video fusion
0 引 言
沪苏浙高速公路(江苏段)起点位于吴江区芦墟镇北的苏沪两省市交界处,与上海沪青平高速公路相接,经过莘塔、北厍、古池荡、八都,终点位于吴江区震泽镇八都北的苏沪两省市交界处,与浙江省申苏沪皖高速公路相接。江苏段路线全长约50千米,全线桥梁超70座,桥梁日常管养工作量较大,尤其体现在桥下空间事件主动监测、桥梁立柱(独柱墩)位移防倾覆监测、桥梁下穿通道超高车辆主动预警监测等。基于高速公路桥梁运行状态的动态控制和智能化精准管控需求,沪苏浙高速公路所属管理公司于2020—2021 年率先试点开展物联技术与三维可视化技术在桥梁事件主动监测中的应用,试点探索运用新技术提质降本增效。
1 研究内容
运用物联技术、三维GIS技术、三维可视化技术实现高速公路桥梁三大管养场景技术的新型应用(视频监控融合AI感知技术与三维可视化技术在桥下空间事件主动监测中的应用、物联网与三维可视化技术在桥梁立柱(独柱墩)位移防倾覆监测中的应用、物联网技术在桥梁下穿通道超高车辆主动预警中的应用)。基于物联技术,将所采集的物联数据放置在高速公路三维地理信息模型中,结合真实的地理位置进行空间定位、直观展示和动态分析,提供可视化场景下的辅助决策支持,提升高速公路桥梁数字化和智能化管理水平,提升高速公路桥梁管养工作效能。
2 技术路线
本研究成果基于Cesium進行Web端开发。Cesium是一个基于JavaScript编写、使用WebGL进行硬件加速图形化的地图引擎,由AGI公司于2011年创建,是一种轻量级的开源三维WebGIS开发框架,它支持2D、2.5D、3D形式的地图展示,可集成多源异构数据,支持多终端跨平台浏览。对于三维地球空间数据而言,Cesium是现阶段最合适的开发工具。
基于Cesium的阴影贴图原理,结合自定义摄像头调整可以做到将高速公路监控视频与道路三维环境无缝融合。
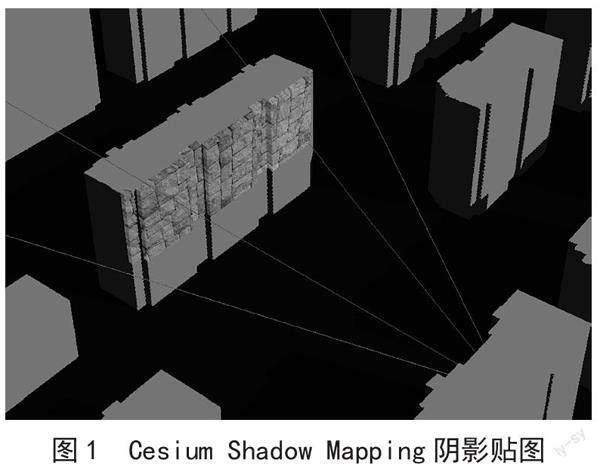
2.1 Cesium Shadow Mapping阴影贴图
阴影贴图(Shadow Mapping)是在三维计算机图形中加入阴影的过程。阴影贴图的概念则是在1978年由Lance Williams在“在曲面上投射阴影”这篇论文中率先提出的。该方法当前已广泛应用于场景预渲染,如图1所示。
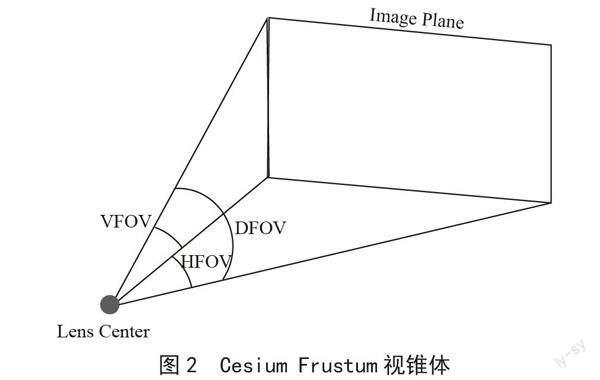
2.2 Cesium Frustum视锥体
视锥体(Cesium Frustum)是当前3D行业最重要的透视模型,若要深入地理解视锥,首先要区分透视和正交的区别。正交与透视是对立统一的,当视点距离物体无穷远时,视野角度无穷小,此时的透视就是正交。透视投影是指模拟物理世界的规律,将眼睛或相机抽象成一个点,此时视锥体内物体投影到视平面上的物体满足近大远小的规律,而正交投影的所有投影射线都是平行的,物体大小不随距离变化而变化,如图2所示。
2.3 Cesium Camera控制相机
CesiumJS中的Camera控制场景的视图。有很多方法可以操作Camera,如旋转(Rotate)、缩放(Zoom)、平移(Pan)和飞到目的地(flyTo)。CesiumJS可借助鼠标和触摸事件处理与Camrea的交互,通过API以编程方式操作摄像机。
Camera表示Camera当前位置、方向、参考帧和视图截锥的状态。上面的Camera向量在每一帧中都是正交的。
*move和*zoom函数平移Camera的位置按照它的方向或指定的方向矢量,方向保持固定不變。
*look和*twist函数旋转Camera的方向比如向上、向右矢量,位置保持固定不变。
结合以上三种关键方法,通过视频流摄像头的位置配准即可实现物联网视频流与倾斜摄影三维的无缝融合,如图3所示。
2.4 Cesium Vertex Shader着色器
Vertex Shader(顶点着色器)和Fragment Shader(片元着色器)是可编程管线。可编程管线是指这个操作可以动态编程而不必写死在代码中。可动态编程实现这一功能一般都是脚本提供的,在OpenGL ES中也一样,编写这样脚本的能力是由着色语言GLSL提供的。可编程管线的引入,方便动态修改渲染过程,无须重写编译代码。
2.4.1 Cesium Vertex Shader顶点着色器
顶点着色器分为输入和输出两部分,提供的功能是对输入的数据进行矩阵变换位置,计算光照公式生成逐顶点颜色,生成/变换纹理坐标,并且把位置和纹理坐标这样的参数发送到片段着色器,如图4所示。
2.4.2 Cesium Fragment Shader片元着色器
片元着色器的工作流程如下:Vertex Program收到系统传递给它的模型数据后,将模型数据处理成后续需要的数据(但至少要包含这些顶点的位置信息)进行输出,紧接着系统对Vertex Program输出的顶点数据进行插值,并将插值结果传递给Fragment Program,Fragment Program根据这些插值结果计算最终屏幕上的像素颜色,如图5所示。
3 应用场景与成果展示
3.1 空间事件主动监测
当前高速公路视频监控方案覆盖了桥面管理,已实现桥面路况监控数据实时查看,尚未覆盖桥梁桥下空间管理。现通过在道路重点监测桥梁桥下的重要部位设置视频监控点,不受时空影响,可随时随地对桥梁下部空间及结构物进行远程全过程动态管控,实时查看桥梁下部空间高清画面,加强空间占用排查,确保桥下空间健康,有效整治桥下空间,消除桥梁安全隐患,确保桥梁安全畅通运行。运用物联网+AI技术实现桥梁主动性、智能化监测。基于对桥下空间事件实时、全天候的主动监测,实时感知桥下安全隐患,并将安全隐患在桥梁BIM模型中快速定位与可视化预警,有效解决当前桥梁日常管养过程中普遍存在的“被动式”管养及桥梁财产损失追责难问题。
3.1.1 多应用场景
多应用场景包括桥下空间周界入侵主动识别与预警、桥下空间火焰与烟雾主动识别与预警、桥下裂缝、航道桥墩撞击、船舶顶部剐蹭监测。各应用场景方案如下:
1)桥下空间周界入侵主动识别与预警:在桥下关键部位安装周界相机,融合AI感知,实现桥下空间周界入侵智能识别。识别场景包括桥下堆积物、桥下非法施工、桥下非法停车、桥下非法建筑、桥下流浪人员驱赶。
2)桥下空间火焰与烟雾主动识别与预警:在桥下关键部位安装火焰检测相机,实时监测火灾隐患。设备支持火焰检测、烟雾报警,可实现桥下空间火灾主动监控与预警。
3)桥下裂缝、航道桥墩撞击、船舶顶部剐蹭监测:在桥下关键部位安装400万像素高清球机,借助监控装置实现远程在线实时查看桥下顶部开裂(支座损坏、盖梁裂缝、立柱破损)、船舶顶部剐蹭监控(超高船舶通过桥梁时碰撞桥梁顶部)、航道桥墩撞击(船舶桩基航道防撞墩甚至主墩)等现场详细记录,同时高清视频回放有利于联合相关部门对肇事船舶进行追责。目前暂不能实现桥墩桩基、顶部剐蹭等主动预警。
3.1.2 系统功能概述
本应用场景实现桥下空间视频流数据集成、桥下空间事件预警等三维可视化展示,具体实现功能如下:
1)桥下空间视频监控点接入沿江高速沪苏浙管理中心,支持沿江高速管理人员、沪苏浙管理中心人员及其他授权人员在线远程实时查看视频数据。系统支持在PC端查看桥梁桥下空间现场视频等功能,如图6所示。
2)基于视频监控点位BIM模型、桥梁真实地理位置,快速掌握道路各桥梁桥下视频监控点安装位置、安装数量、安装时间及设备规格参数。
3)系统支持一张图三维可视化展示各桥梁桥下空间视频监控运行状态与预警提醒,如摄像头异常状态用红色标识高亮显示,异常预警以气泡窗口展示预警信息。预警内容包括时间、桥梁名称、预警类型(入侵、火灾)、预警位置、预警信息、事件视频数据。
4)实时采集视频监控设备预警数据,实现监测预警数据在高速公路三维数字模型中快速定位,向指定管理人员推送报警信息,第一时间排查及解决桥下空间隐患问题。报警内容包括报警时间、桥梁名称、预警类型(入侵、火灾)、预警位置、预警信息。
5)桥下空间视频监控点支持设置巡检预置点,实现桥下空间每日自动巡检,自动巡检过程中支持镜头焦距变化,无须手动切换或调整镜头焦距、观测范围。
6)为桥下事件处理提供证据。前端攝像头自动抓拍现场事件画面,系统支持查看、下载事件图像与视频数据,翔实记录现场事件全过程。
3.2 高速公路桥梁立柱(独柱墩)位移防倾覆监测
通过运用各类传感器(智能倾角计、水平位移计、支座位移计)、采集设备(万能通用采集仪)、传输设备(4G网关),将各监测点信息实时传输至系统,实现高速公路桥梁立柱(独柱墩)变形、位移、倾角等动态监测。系统基于各监测指标参数数值、变化趋势,通过合理的计算和分析对桥梁工作状态进行评估和预报,动态掌握桥梁立柱位移倾斜发展态势。同时通过对位移传感器、倾角仪设定安全阈值,对结构监测状态做出即时评估,达到安全预警的目的,为桥梁立柱维护以及加固维修提供决策依据,为桥梁管理人员提供及时、准确的位移监测数据,保障高速公路桥梁立柱(独柱墩)的安全运营,如图7所示。
桥梁结构防倾覆位移在线监测系统主要由三大部分组成,分别是数据采集设备、网络传输设备、远程控制中心。通过在桥梁支座上安装位移传感器,实时监测位移数据变化。通过在桥梁立柱转角安装倾角仪,实现桥梁立柱倾斜数据变化。通过对位移传感器、倾角仪设定的安全阈值,对结构监测状态做出即时评估,达到安全预警的作用,如图8所示。
系统功能如下:
1)系统建立各桥梁立柱传感器电子台账,一桥一档。档案内容包括桥梁名称、桥梁位置、传感器类型与数量、桥梁立柱编号、传感器安装位置、传感器安装时间、传感器安装单位。系统支持多条件快速检索传感器台账信息。
2)系统支持一张图三维可视化展示各桥梁传感器的运行状态数据。显示内容包括桥梁名称、立柱桥墩号、传感器安装位置、传感器类型、传感器名称、传感器编号、传感器运行状态、传感器安装时间、传感器数据监测时间、位移实时监测数据、位移状态是否异常,如图9所示。
3)系统支持异常预警通知。通过网络实时传输监测数据,及时对异常数据进行报警。支持平台在线报警、移动端报警、短信通知。报警内容包括报警时间、桥梁名称、立柱桥墩号、传感器名称、安装位置、报警类型、异常报警数据。
4)系统支持各传感器历史数据查询,支持按传感器类型、桥梁名称、立柱编号查询传感器历年监测数据,支持导出统计分析数据。
5)系统建立预警数据台账,支持按桥梁分类在线汇总查看预警记录、支持按预警数据数量行中桥梁立柱异常运行状态进行排统计,支持导出统计数据。统计内容包括排名、桥梁名称、桥梁立柱、预警异常类型(选择位移/倾斜)、预警次数。
3.3 穿通道超高车辆主动预警
通过在桥梁下穿通道两侧安装立杆,立杆及立杆横架上分别安装红外对射探测器、抓拍摄像机、声光语音警报器,对进入警戒区域的车辆进行实时超高检测,发现超高车辆时启动声光语音报警器对超高车辆进行灯光和语音警报,主动提醒车辆驾驶员,正确引导车辆通行。如果超高车辆驾乘人员不听劝告继续前进,则启动抓拍摄像机抓拍超高车辆照片(可以清晰辨认车辆车牌号)并通过网络实时传送给系统,系统将警报信息主动推送至道路管理人员,便于道路管理部门做出相应的应急处理,如图10所示。
系统功能:
1)桥下下穿通道视频监控点接入沿江高速沪苏浙管理中心,支持沿江高速管理人员、沪苏浙管理中心人员及其他授权人员在线远程实时查看视频数据。系统提供在PC端查看现场实时视频数据等功能。
2)系统实时推送事件预警通知,支持PC端发送通知信息。预警通知内容包括事件时间、下穿通道名称、下穿通道地点、超高车辆抓拍照片。
3)系统支持一张图展示各下穿通道超高车辆刮撞预警信息(事件时间、地点、超高车辆抓拍照片)。支持查看、下载事件图像与视频数据,便于快捷取证追责。
4)系统支持对各下穿通道车辆超高刮撞事故率进行排名统计,方便管理人员精准开展桥下下穿通道限高管理工作,有效降低事故率。统计内容包括排名、下穿通道名称、下穿通道地点、事故次数。
4 结 论
随着物理网技术在高速公路管理中的广泛应用,基于物联传感器的多种动态数据的综合三维可视化展示成为新的技术挑战。利用基于Webgl技术的Cesium等三维前端框架可为交通物联传感数据的实时展示提供丰富的解决方案。通过基于Webgl的阴影贴图、视椎体、摄像头、着色器等开发可实现动态传感数据、实时视频流与三维场景的无缝融合,使得物联动态数据与三维场景可以进行更为直观的展示。随着高速公路管理方式的不断升级,物联传感数据的数据格式也在不断地丰富,其三维可视化展示仍然需要进一步的研究,为高速公路物联传感动态数据的三维可视化提供一定的参考借鉴。
参考文献:
[1] 王剑伦,邱巍,周云龙,等.基于物联网的高速公路试验检测管理平台开发 [J].科技创新与应用,2022,12(3):192-196.
[2] 曹祎楠,王佳,顾大鹏.面向多源数据集成的高速公路数字化方法 [J].科学技术与工程,2019,19(19):214-221.
[3] 周勇帅.基于Cesium框架实现倾斜摄影单体化的方法研究 [D].成都:成都理工大学,2021.
[4] 张永强,王波,申茂廷.基于Cesium的3DWebGIS三维场景加载及开发 [J].河南科技,2021,40(21):8-10.
[5] 马瞳宇,崔静,储鼎.基于WebGL的实景三维场景与视频监控图像融合技术研究 [J].测绘与空间地理信息,2020,43(S1):80-83.
作者简介:翟锐(1977—)男,汉族,江苏淮安人,高级工程师,本科,主要研究方向:高速公路工程养护与管理;雷志刚(1983—),男,汉族,江苏南京人,高级工程师,本科,主要研究方向:高速公路信息化与智能化管理。
收稿日期:2023-04-03
猜你喜欢
智能物联技术(2022年2期)2022-11-10 12:23:04
世界科学技术-中医药现代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
中老年保健(2021年8期)2021-08-24 06:24:14
今日农业(2021年8期)2021-07-28 05:55:52
智能物联技术(2021年4期)2021-03-13 08:27:12
海洋信息技术与应用(2020年1期)2020-06-11 12:43:56
传媒评论(2019年4期)2019-07-13 05:49:14
记者观察(2019年1期)2019-04-04 01:06:36
上海建材(2018年4期)2018-11-13 01:08:54
