三维激光扫描与无人机摄影在异形建筑三维建模中的应用
2023-11-22 10:46:17张津瑞
现代信息科技 2023年19期


摘 要:当前,三维激光扫描是异形建筑中首选的三维建模测量方式。但在实际异形建筑三维建模过程中,三维激光扫描会受到视角等多方面的限制,存在模型缺失等问题。相较于三维激光扫描,无人机倾斜摄影技术模型完整性较强,但整体精度较差,为大幅提升异形建筑三维建模精度,文章将两种测量建模技术相融合。以“鸟巢”为典型异形建筑样例,通过数据采集与分析,对单独建模和融合建模的精度展开研究,以期为异形建筑三维建模提供新方法、新思路。
关键词:三维激光扫描;无人机倾斜摄影技术;异形建筑;三维建模
中图分类号:P225.2;P237 文献标识码:A 文章编号:2096-4706(2023)19-0163-04
Application of 3D Laser Scanning and UAV Photography in 3D Modeling of Irregular Buildings
ZHANG Jinrui
(Baiyin Mineral Exploration Institute of Gansu Nonferrous Metals Geological Exploration Bureau, Baiyin 730900, China)
Abstract: At present, 3D laser scanning is the preferred 3D modeling and measurement method for irregular buildings. However, in the actual 3D modeling process of irregular buildings, 3D laser scanning is limited by various aspects such as perspective, and there are problems such as model missing. Compared to 3D laser scanning, UAV tilt photography technology has stronger model integrity, but overall accuracy is poor. To significantly improve the accuracy of 3D modeling of irregular buildings, this paper integrates the two measurement and modeling technologies. Taking the “Bird's Nest” as a typical example of irregular buildings, through data collection and analysis, the accuracy of individual and integrated modeling is studied, in order to provide new methods and ideas for 3D modeling of irregular buildings.
Keywords: 3D laser scanning; UAV tilt photography technology; irregular building; 3D modeling
0 引 言
伴随着社会及科学技术快速发展,二维数据已无法满足社会发展需求,三维建模凭借直观、便捷、纹理清晰等优势被逐渐应用在建筑建模构建中。三维激光扫描、无人机倾斜摄影技术是最为常用的异形建筑三维建模方法。在实际三维建模过程中,无人机倾斜摄影技术存在高效、低成本等优势,但同时也存在建模精度不够、内部建模、测量困难等缺陷。同样,三维激光扫描在实际建模过程中存在精度高、可开展内部建模、测量等优势,但亦存在建模完整性缺失等缺陷。将两种技术优缺点对比发现,两种技术存在“优势互补”这一特点。基于此,为提升异形建筑三维建模精度,本文深入开展基于三维激光扫描与无人机倾斜摄影技术对异形建筑三维建模的融合应用研究。
1 三维激光扫描原理
三维激光扫描是基于激光测距原理,应用三维激光扫描仪器测量物体表面三维坐标的建模技术。其原理是:由三维激光扫描仪器的激光发射组间发出多道光束,借助光束经三维激光扫描仪器内部高精度计量装置,记录光束在出射点位、反射点位的往返時间(ΔT),并对纵向、横向垂直扫描角度(α)进行计算,最终得到物体表面三维坐标[1]。一般来说,在三维激光扫描设备中存在一个坐标系统,以光束出射点为坐标系统的原点,以Z轴为纵向方向,X轴在水平面上与Z轴相垂直。在建模过程中,可以用下面的公式来计算被测量对象的P坐标[2]:
基于三维激光扫描技术还可获得反射系数、倾斜距离、纹理等物理信息,从而实现目标的多点测量与扫描。获取目标三维坐标、反射率、倾斜距离、纹理等空间信息,经数据处理软件生成目标三维“点云”模型。在此基础上,利用点云数据,可以进行变形监测、区域测量、地形测量、三维建模等[3]。
2 无人机倾斜摄影技术原理
无人机倾斜摄影技术原理是指在同一飞行平台中应用多台传感器,分别从垂直、倾斜等多个角度对建筑物影像进行采集,以此来获得更为完整的建筑物物体表面信息。其中垂直角度获取的影像为正片,倾斜角度获取的影像为斜片。利用多角度采集建筑物表面信息,再配合影像POS信息等,促使影像上每一个点位均具有三维坐标,并依据影响数据针对任意点位展开测量,进而获取并生成最终三维地理信息模型[4,5]。
3 典型案例分析
3.1 “鸟巢”概况
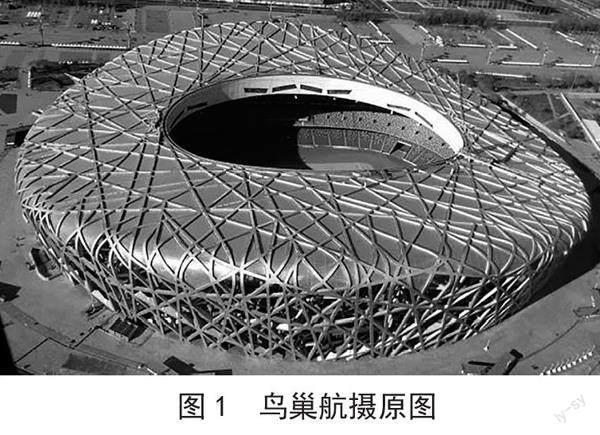
本文选取“鸟巢”作为典型案例,“鸟巢”由镂空铝板、玻璃共同构成,建筑结构为巨大的门式刚架结构,是国内最具代表性的异形建筑,如图1所示。
3.2 两种点云获取
本文选用FARO Focus3D X330三维激光扫描仪,在10、25 m时扫描仪反射率为90%、10%,扫描仪误差均为2 mm。“鸟巢”周围结构地形较为复杂,对于三维激光扫描测站的要求较高。测站越多易造成较大误差,在扫描仪架设过程中,需确保前后两个测站间至少存在3个可通视的高差靶球,其半径应控制在0.072 5 m。借助FARO SCENE软件针对点云中心靶球进行提取并拼接,经降噪、剪裁等处理后,构建三维模型如图2所示。由图2可知,由于“鸟巢”本身构造较为独特,经三维激光扫描“鸟巢”构建的云点图存在一定的缺失现象,如顶部、底部、中层均出现了大片结构缺失。由此可见,三维激光扫描“鸟巢”构建的云点图存在一定缺陷。
本文选用DJI Matrice 600 Pro无人机开展无人机倾斜摄影,由无人机搭载五个倾斜摄影相机,传感器型号为SONY DSC-QX100,尺寸為13.2 m,焦距为10.4 mm,像素为2 020万,分辨率为5 472×3 648,每3 s拍摄一次,摄影时间为25 min。针对“鸟巢”周围2.5 hm2范围实施无人机倾斜摄影,将航高设定为90 m,航向、旁向重叠度设定为90%与80%,最终获取不少于1 200张影片。随后借助Smart3D Capture软件进行建模,最终得到“鸟巢”云点图,如图3所示。
3.3 两种点云数据融合
由图1可知,俯视角度,在三维激光扫描过程中“鸟巢”建筑外层玻璃发生则折射最终会影响建模表面精度,为此在两种点云数据融合过程中需要将此类精度低的部分予以剔除。由图2可知,显而易见无人机倾斜摄影可较为完整的保留“鸟巢”顶部信息,但在图像中却缺失了“鸟巢”表面弧度,且由于“鸟巢”建筑并不规范,促使无人机倾斜摄影云点图接近地面的部分存在数据空洞、变形严重等问题,为此需要将此类缺陷部分予以剔除。
将两种云点图缺陷部分剔除后,对两种点云数据加以融合,选取“鸟巢”特征较为明显的点位,提取两种点云数据的公共特征点位,借助平移、旋转等处理手段,将点云模型加以匹配最终得出完整的点云数据图,如图4所示。
图4中黑色点位为三维激光扫描点云数据的公共特征点位,灰色点位为无人机倾斜摄影点云数据的公共特征点位。待两种点云数据融合后,同样需要关注空洞、变形等问题,对于未融合到位部分进行剔除、剪裁,在确保三维建模精度的前提下,得出最终融合云点图,如图5所示。
3.4 精度分析
为进一步验证本文所提出的两种技术融合应用在异形建筑三维建模中的优越性及可行性,本文从点云建模精度方面展开分析,具体如下:
三维模型最终精度同光照、建筑物材质等密切相关。其中,三维激光扫描得出的点云模型会受到仪器本身精度、参考标靶、数据拼接等技术影响。无人机倾斜摄影得出的点云模型会受到无人机摄影高度、镜头分辨率、航线规划等影响。此外,人为因素同样会影响两种技术生成点云模型的精度。
为验证两种建模技术及两种技术融合建模的最终精度,在精度分析中本文将公共特征点距离作为主要指标,分别测量并计算两种点云数据公共特征点距离并进行对比,得到结果如表1所示。
由表1可知,两种点云数据公共特征点距离误差处于0.01~0.03 m,本文对公共特征点进行解算并展开匹配,发现平均误差为0.01 m。充分考虑测量目标“鸟巢”建筑的特殊性,此次测量精度良好,两种点云数据公共特征点距离误差可满足异形建筑三维建模的精度要求。若想要达到更高的三维建模精度,需要持续改善两种技术的点云数据采集精度,将两种技术融合应用在“鸟巢”三维建模中,计算融合后的点云数据公共特征点距离,并将其同实际公共特征点距离进行比较,并计算误差值。如表2所示。
由表2可知,融合后点云数据公共特征点距离误差在0.010~0.015 m之间,平均精度误差在0.015 m内,与两种点云数据公共特征点距离误差相比,融合后得出的云数据公共特征点距离误差更低,精度更高。由此可见,将三维激光扫描与无人机倾斜摄影技术融合应用在异形建筑三维建模中可有效提升点云数据精度,此种精度可满足大多数建筑物的三维建模精度需求。
3.5 视觉效果分析
在确保三维建模精度的前提下,视觉效果在异形建筑三维建模过程中应得到充分重视。
3.5.1 三维激光扫描视觉效果
三维激光扫描仪获得的点云数据灵活、实时性好、精确到毫米量级、自动化水平相当高,不会出现地表变形、空洞等现象,点云分布比较均匀,视觉效果较好。但是也存在着一些缺陷,例如:不能对高楼顶端进行扫描,造成点云模型缺少高楼顶端的位置信息以及数据冗余[6]。在“鸟巢”三维建模中,受到“鸟巢”建材特定的影响,在三维激光扫描过程中获得了大量冗余数据,不仅会影响点云数据精度,同时会降低三维建模视觉效果。
3.5.2 无人机倾斜摄影视觉效果
无人机倾斜摄影测量具有多角度、大尺度、高清晰度、低成本等优点,可快速、便捷地获取地表正片图像和地表表面纹理信息。在此基础上,利用高效的数据处理系统,可以迅速地实现城市的三维重建。但是,该技术也存在着一定的缺陷,例如:对于结构复杂、玻璃材质等比较特殊的建筑,无人机的倾斜摄影测量效果仍然不理想;在建筑曲线较大的地方,很容易出现空洞、变形等问题;同时,由于被测对象周边建筑的影响,拍摄角度可能会出现遮挡等问题。所以,在测量对象周围开阔,没有明显遮挡,测量范围大的情况下,采用无人驾驶飞机倾斜照相测量方法对其进行三维建模是非常合适的,但如果对象是结构复杂、材料特殊的异形建筑物,这种方法就有一定的限制,如图6所示。
3.5.3 融合应用视觉效果
基于上述分析,发现单纯应用三维激光扫描、无人机倾斜摄影技术的视觉效果均存在一定局限。本文将二者融合应用在异形建筑三维建模中,将两种技术建模优势相结合,可呈现良好的三维建模视觉效果。
4 结 论
综上所述,本文将“鸟巢”作为典型的异形建筑案例,发现无论是三维激光扫描技术还是无人机倾斜摄影技术在异形建筑三维建模方面存在一定缺陷。为弥补此类缺陷,本文将三维激光扫描技术与无人机倾斜摄影技术相融合,经精度对比分析发现将三维激光扫描与无人机倾斜摄影技术融合应用在异形建筑三维建模中可有效提升点云数据精度,经视觉效果分析发现,二者相融合的三维建模视觉效果明显优于单纯应用单一技术建模的视觉效果。由此可见,可将三维激光扫描与无人机倾斜摄影技术融合应用在异形建筑三维建模中。
参考文献:
[1] 经皓然,徐敬海.异形建筑的无人机点云与地面三维激光扫描点云配准 [J].测绘通报,2022(6):32-39.
[2] 裴建隆.基于三维激光扫描与无人机倾斜摄影技术对异形建筑三维建模的融合应用[J].江西科学,2021,39(6):1060-1064.
[3] 宋洪英,曹坤,闫晓楠.基于三维激光扫描的高层建筑建模研究 [J].粘接,2021,47(8):123-126.
[4] 田泽海,杨友生,宋康明.三维激光扫描技术在异形建筑规划条件核实测量中的应用[J].地理空间信息,2021,19(5):81-84+5.
[5] 李晓华,张茹.激光扫描技术在中国古代建筑精细测绘中的应用——以西安钟楼三维建模及精细测绘项目为例 [J].北京测绘,2021,35(5):678-683.
[6] 佘智渊.基于三维激光扫描的校园建筑三维建模 [J].甘肃科技,2020,36(16):114-118.
作者简介:张津瑞(1994—),男,汉族,甘肃白银人,助理工程师,本科,主要研究方向:测绘、地理信息等。
收稿日期:2023-04-08
猜你喜欢
智能计算机与应用(2017年3期)2017-07-15 14:01:19
农家科技中旬版(2017年5期)2017-07-14 08:38:27
中国科技纵横(2017年3期)2017-03-29 16:01:41
中小企业管理与科技·上旬刊(2016年12期)2017-01-05 00:09:51
科学与财富(2016年15期)2016-11-24 13:20:11
中小企业管理与科技·下旬刊(2016年11期)2016-11-18 08:18:07
电脑知识与技术(2016年24期)2016-11-14 00:38:44
科技视界(2016年16期)2016-06-29 18:34:41
科技视界(2016年8期)2016-04-05 09:11:14
科技视界(2016年4期)2016-02-22 12:45:32