DFIG高电压穿越技术研究
2023-11-21 08:02史春飞章敏凤马利祥
平顶山学院学报 2023年5期
史春飞, 章敏凤, 马利祥
(安徽信息工程学院 电气与电子工程学院,安徽 芜湖 241000)
0 引言
电网的故障通常分为低电压故障与高电压故障.针对电网发生低电压故障期间风电机组的低电压穿越(LVRT,Low Voltage Ride Through),许多学者进行了大量研究,使得风电系统在不同故障情况下,能够安全穿越故障区间;但是,当电网发生高电压故障时,如何实现风电机组的HVRT,国内外学者研究较少.另外,高电压故障对于风电机组以及电网带来的冲击不容忽视,亟须解决[1-3].
若电网出现短路故障情况,风速急剧增加导致风电机组注入电网的有功功率大幅波动,以及使用无功补偿装置投入风电系统,切除风电系统等情况,都会使得电网电压骤然升高.若不采取相应HVRT措施稳定电力系统电压,将会使得风电机组发生脱网的风险,风电场进而发生解体的事故[4].而在电网高电压故障期间,由于风电场的解体,没有给予电网系统一定电压与频率的支撑,使得电网系统高电压故障进一步恶化,产生恶性循环[5-6].所以针对电网发生高电压故障,如何实现风电机组的高电压穿越,显得十分必要,既保护了风电场的安全,又保护了电网的安全.
随着风电事业的迅速发展,在风电场装机比例中,DFIG在所有风力发电机机型中所占比例越来越高.DFIG是否安全运行对于风电系统来说起着举足轻重的作用.而在电网发生高电压故障期间,含DFIG机型的风电场能否穿越故障区间成为一项重要技术指标[7-8].
文献[9-10]分析了在电网发生高电压故障期间变流器有功、无功功率两者之间的关系,提出基于动态无功支撑的HVRT方案.文献[11-12]从动态无功补偿控制方面分析了高电压现象产生的主要原因,针对传统控制的方法,提出了一种改进动态无功功率调节控制的方法,该方法显著地提升了DFIG的HVRT能力,并且不需要额外的硬件电路,使得该方法对于传统控制方法来说节省了成本;但是该方法有一定的局限性,对于电机参数要求比较高,当电网发生较为严重的高电压故障时,由于DFIG机型自身变流器容量大小的因素,使DFIG系统的HVRT能力受到很大制约.文献[13]通过混合储能系统实现DFIG高电压穿越,当电网发生高电压故障时能够通过储能系统吸收风电机组输出的有功功率,避免在故障期间持续地向电网输送有功功率,减缓电网高电压故障程度,使得DFIG机组安全穿越高电压故障区间.但是,该方法硬件成本太高,对于储能系统与风电系统之间的协调控制难度较大.文献[14]分析了高电压故障期间DFIG机组的运行特性,但是,对于电磁过渡过程没有进行相关详细的理论分析与公式推导.文献[15-16]对DFIG各个分量电磁暂态特性的变化进行了详细分析,但是,仅对发生高电压故障期间进行分析,没有研究在故障发生、结束时,DFIG电磁暂态特性剧烈变化的原因,以及对于这一现象的处理措施.
综上所述,针对DFIG系统高电压故障特性,提出基于Crowbar的DFIG系统高电压穿越控制方法,实现DFIG系统穿越高电压故障区间,保护风电机组以及电网安全.
1 电网发生高电压故障期间DFIG的暂态过程分析
图1为DFIG机组在两相旋转坐标系下的等效电路,已把转子侧参数归算到定子侧.

图1 DFIG机组等效电路
根据DFIG机组的等效电路图,有以下方程:
(1)
(2)
Ψs=Lsii+Lmir,
(3)
Ψr=Lrir+Lmis.
(4)
式中ω为旋转角速度,r为电阻,L为电感,Lm为互感,s、r分别为定子和转子分量.
由式(3)、(4)可得
(5)

由式(2)、(5)得转子电压
(6)
转子电动势
(7)
当DFIG机组在稳态情况下,定子电压空间矢量为一个幅值为Use,以同步旋转角速度为ωs的矢量.表达式为
Us=Useejωst.
(8)
由式(1),在忽略定子电阻的情况下得
(9)
由式(8)、(9)得相应的定子磁链方程
(10)
由式(7)、(10)得
(11)
式中,ωr=ωs-ω,s=ωr/ωs为转差率.
上述假设转子为开路下的转子电压.若变流器驱动转子时,由式(6)、(10)得到转子电压方程:
(12)
由于大容量DFIG机组转子电阻、暂态电感比较小,可以忽略不计,在转子开路的情况下进行分析,假设开路电压与DFIG机组转子电压相同.
当t=t0时,电网电压
(13)
其中k=(Us-Use)/Use为电网电压骤升幅度.由式(1)、(3)得
(14)
最后由式(13)、(14)可得,若发生高电压故障,定子磁链
(15)
式中,τ=Ls/rs为DFIG定子电磁时间常数.
由式(15)知,若电网发生高电压故障,强制分量、自然分量共同组成定子磁链,电网电压对定子磁链中的强制分量有较大影响,此分量旋转速度为ωs,在电网发生高电压故障时能够维持磁链连续性,所以产生了自然磁链.自然磁链幅值大小是不断衰减的一个过程.在高电压故障时,转子电动势

(16)
2 中国国家标准
根据我国目前风力发电的实际发展情况,国家制定了适合我国国情的高电压穿越标准,要求当电网发生高电压故障时,并网点电压若上升至1.3 p.u.,DFIG机组能够并网运行0.5 s;电压若上升至1.25 p.u.,风机能够并网运行1 s;电压若上升至1.2 p.u.,风机能够并网运行10 s;电压若上升至1.1 p.u.,风机能够不脱网一直保持运行状态,如图2所示.

图2 风电机组故障穿越能力
3 双馈风机高电压穿越控制策略
DFIG高电压穿越控制方法如图3所示.首先,故障检测模块将检测到的并网点进行取绝对值运算,使得故障检测模块输出的信号波形周期为原始电网电压的一半.其次,将故障检测模块的输出信号与设置的高电压报警阈值Umax进行比较.当检测信号小于设定阈值Umax时,说明电网没有发生高电压故障,故障检测模块继续周而复始地进行检测,风电机组继续平稳地运行.当故障检测模块检测到的信号大于设定阈值Umax时,与Umax进行相应运算,数据处理运算输出Crowbar投切控制信号3.使得Crowbar电路投入,切除DFIG系统,从而保护风电机组安全,实现高电压穿越.

图3 控制方法
4 仿真分析
在MATLAB/Simulink中搭建DFIG风电系统.首先,在验证DFIG系统稳定的基础上,进行故障仿真实验.当DFIG系统并网点发生三相对称高电压故障,且故障时间区间为1 s~1.5 s时,高电压故障期间电压上升至1.3 p.u.,如图4所示.
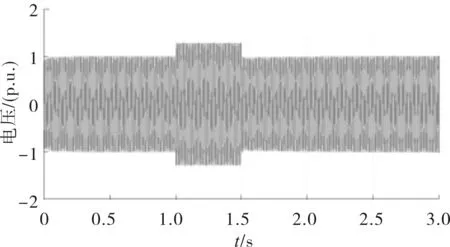
图4 高电压故障并网点电压
若在DFIG系统中投入高电压控制策略,通过检测模块的实时信号监控,进行信号处理,得到Crowbar动作控制信号,如图5所示.当电网稳态运行时,控制信号处于低电平,Crowbar电路未被投入DFIG系统中,Crowbar电路也未被导通;当电网在1.0 s时,发生高电压故障,可以看出控制信号立即从低电平变为高电平,将Crowbar电路投入DFIG系统中,并驱动Crowbar电路导通,用于保护DFIG系统,在1.5 s故障消除后,又将Crowbar电路从DFIG系统中切除,使得DFIG系统能够迅速恢复到稳定运行状态.

图5 Crowbar动作控制信号
为检验提出的高电压穿越策略的有效性,是否能够实现DFIG风电系统的高电压穿越.分别对有无保护措施的情况下,风电系统的各个输出参数进行对比分析.
图6、图7为未投入保护措施下的DFIG风电机组转、定子侧电流波形,可以看出在发生高电压故障期间,转、定子侧电流发生波动,特别是定子侧电流在故障发生期间出现长时间的过电流,两者对DFIG系统稳定造成一定冲击.
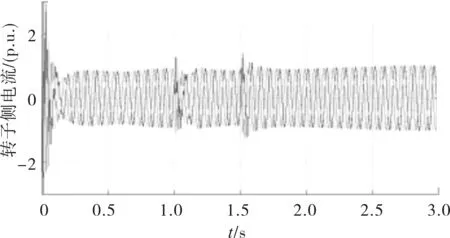
图6 未投入保护措施转子侧电流

图7 未投入保护措施定子侧电流
当投入保护措施后,DFIG风电机组转、定子侧电流波形如图8、图9所示.在没有发生故障前,检测模块检测到并网点电压没有超过设定阈值,Crowbar电路未被启动,没有投入DFIG系统中.在并网点发生高电压故障时,电压幅度超出设定阈值,此时检测电路的输出信号控制Crowbar电路投入DFIG系统中.在投入Crowbar保护电路期间,DFIG风电机组的转子侧电流幅值被消减至几乎为零,转子侧电流得到有效控制,而定子侧电流也得到极大的消减,有效地减缓了高电压故障期间转子侧电流对DFIG系统稳定的冲击,有效地实现了DFIG风电机组的低电压穿越.

图9 投入保护措施定子侧电流
如图10为DFIG风电机组投入保护前后转矩的变化,当未投入保护措施时,在发生高电压故障期间,转矩发生剧烈波动,对于风电机组的安全运行存在很大隐患.当投入保护措施后,使得风电机组的转矩迅速降为零值附近,极大地消除了高电压故障期间转矩波动产生的噪声、电磁干扰以及可能引起的共振对风电机组的危害.图11为风电机组有功功率在投入保护前后的变化,当投入保护后,Crowbar电路卸荷了风电机组的有功功率,使得输出有功功率降为零值附近,高电压故障期间,DFIG系统几乎没有向电网输出有功功率,有效地避免了故障期间由于DFIG系统输出有功功率使得电网高电压故障的恶化.

图10 转矩

图11 有功功率
图12为风电机组直流母线电压变化,当电网电压骤升到1.3 p.u.时,在故障发生开始与结束时直流母线电压骤升到1 180 V,对变流器产生很大的冲击,当投入HVRT控制策略后,极大地消除了直流母线的波动,在故障期间直流母线电压几乎回到原值1 150 V,仅在故障开始和结束时有微小波动,实现了DFIG风电机组的高电压穿越.

图12 直流母线电压
5 结论
笔者提出的DFIG系统高电压穿越控制策略,在高电压故障期间能够迅速地投入DFIG系统中,在故障期间有效地消减了DFIG机组定、转子侧的过电流,极大地消除了风电机组转矩的震荡,使得风电机组的输出有功功率基本被消耗;同时,在故障期间对直流母线电压的波动也有一定的抑制.在高电压故障期间提出的控制策略,有效地提高了DFIG系统的高电压穿越能力.
猜你喜欢
数学大王·趣味逻辑(2021年11期)2021-12-03
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
能源(2018年6期)2018-08-01
能源(2018年6期)2018-08-01
能源(2018年8期)2018-01-15
风能(2016年12期)2016-02-25
河南电力(2016年5期)2016-02-06
河南电力(2015年5期)2015-06-08
河南电力(2015年5期)2015-06-08