基于GNSS基准站数据的控制点CGCS2000坐标计算
2023-11-19 01:22:14张吉君刘彦杰包暑光
水利水电快报 2023年11期
张吉君,刘彦杰,包暑光
(长江三峡勘测研究院有限公司(武汉),湖北 武汉 430074)
0 引 言
CGCS2000是一个严密的坐标系统,是ITRF97框架、2000.0历元下的瞬时坐标,也是中国目前正在推广并使用的新一代大地坐标系[1],所有测绘成果均需采用或者转换到CGCS2000坐标。但是,普通用户很难获得具有CGCS2000坐标成果的控制点,需要向测绘成果主管部门申请或者把原始观测数据送到有关部门解算才能获得;由于测绘成果保密的原因,这两种方式既耗时又繁琐[2]。目前,对于获取控制点CGCS2000坐标的研究,尹业彪[2]通过GAMIT软件对IGS站观测数据进行解算,研究了通过现有资料和技术手段,实现获取CGCS2000坐标的可行性,提高小型测绘单位CGCS2000坐标的自给率,降低小型测绘活动的生产成本、提高生产效益。胡思华和曾庆春等在工程项目中联测IGS站获取CGCS2000坐标,并分析其精度与实用性[3-4]。黎鹏等[5]将待测点与IGS站组网解算得到高精度坐标,然后通过动态转换获取CGCS2000坐标,并探讨其在实际工程应用中的可行性。刘明波等[6]采用联测IGS站方法,为计算偏远地区控制点的CGCS2000坐标提供实用思路。
但是,以上研究都只对某一特定区域GNSS数据进行解算和分析,具有一定的局限性。本文提出一种选用公开的GNSS基准站并对其坐标成果进行验证的方法,通过将分布于5个不同省份的控制点联测GNSS基准站,根据CGCS2000定义,结合坐标参考框架转换和历元归算,将对应ITRF框架当前历元下的坐标转换为ITRF97框架(参考历元为2000.0)下的坐标,即CGCS2000坐标。
GAMIT/GLOBK是受到国内外学者一致认可的高精度GNSS数据处理软件之一,处理基线和连续观测的静态数据时,解算时间快,能够有效地消除或者削弱GNSS测量误差带来的影响,获得高精度基线解算结果[7-10]。基线结果在平差时不受测区已知控制点的约束,采用GNSS基准站作为已知控制点,解算过程中使用卫星精密星历、对流层等改正模型,获取测站高精度的三维坐标信息,有效解决了常规GNSS测量依赖已知控制点、短基线解算的缺点[11]。因此,利用GAMIT/GLOBK软件进行数据处理和平差,可方便快捷地直接获取控制点CGCS2000坐标。经验证,该方法可直接获取大陆地区任意区域的控制点CGCS2000坐标,解决工程项目亟需的已知点坐标问题,具有快捷性和高可靠性。
随着中国深入推进“双碳”目标,加快能源结构调整,新疆、西藏等具备丰富新能源资源的偏远地区正在加紧推进抽水蓄能电站等大批水利水电项目。这些项目所在地通常远离城镇,没有通讯信号。因国家高等级控制点分布不均匀且项目前期申请控制点需要一定周期,对于急需完成各项报批流程的项目,如何尽快完成前期地形图测绘、地质钻孔放样是关注的重点。通过公开的GNSS数据可以及时获取无网络信号区域控制点的CGCS2000系坐标,开展各项测绘工作,完成项目申报流程。
1 控制点计算方法
公开的GNSS数据包括全球IGS站观测文件、香港CORS(Continuously Operating Reference Stations)网观测文件以及其在各参考框架下的三维坐标和速度信息,还包括广播星历、精密星历、精密钟差等GNSS解算相关文件。利用公开的GNSS数据,将控制点联测公开的GNSS基准站,采用GAMIT软件进行基线处理;目前GAMIT求解的基线结果是ITRF2014框架、当前历元下的成果,从ITRF网站(https:∥itrf.ign.fr/)获取GNSS基准站ITRF2014(当前历元)下的精确坐标作为起算点,利用GLOBK软件进行空间三维平差,获取未知控制点ITRF2014(当前历元)下空间三维坐标,然后进行框架历元转换,由ITRF14框架(当前历元)下坐标转换到CGCS2000(ITRF97框架、2000.0历元)坐标成果。图1为联测GNSS基准站计算控制点CGCS2000坐标的流程。框架转换参数可从ITRF网站上获取,其精度有保障;历元转换必须要获得观测控制点的速度值,其数值是利用控制点ITRF2014框架当前历元下的三维空间坐标,基于全国2 300多个控制点多年实测速度拟合而成,或者利用CPM-CGCS2000板块欧拉矢量计算控制点速度值[12]。

图1 联测GNSS基准站计算控制点CGCS2000坐标的流程Fig.1 Process of calculating control point CGCS2000 coordinate with GNSS reference station
2 选用公开的GNSS基准站
由于中国各省CORS站数据不公开,IGS站数据存在着分布数量偏少,且数据发布不连续的问题。因此,选用中国及其周边地区数据发布连续和稳定的IGS站点作为基准控制点,根据CH/T 2014-2016《大地测量控制点坐标转换技术规范》,基准控制点需要遵循连续性、稳定性、高精度、多种解、均衡性以及精度一致性原则。通过查阅International GNSSService网站,核实IGS站点的数据信息和点位分布情况,如表1所示,最终选用41个IGS站点作为常用的GNSS基准站。
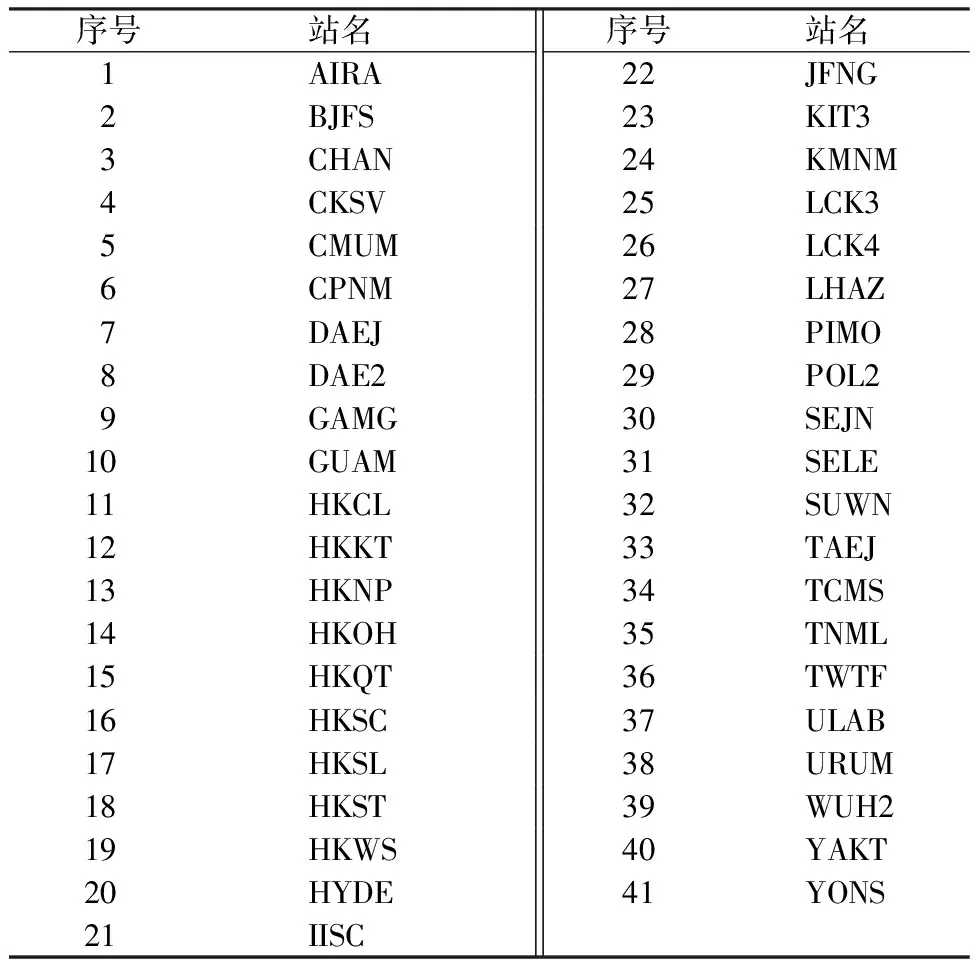
表1 常用的GNSS基准站Tab.1 Common GNSS reference stations
为了检验所选IGS站点的稳定性,首先通过ITRF网站获取IGS站点对应框架和历元下的坐标,基准站ITRF2020框架(2015.0历元)和ITRF2014框架(2010.0历元)下的三维坐标及速度作为转换前输入成果,基准站ITRF2014框架(2000.0历元)和ITRF97框架(2000.0历元)下的坐标作为已知成果,然后通过以下3种方式检验IGS站点的稳定性和框架历元转换的正确性。转换结果见表2~3。

表2 方式一和方式二转换结果与已知成果比较差值Tab.2 Difference between the conversion result of method 1 and method 2 and the known result cm
(1) 方式一:获取站点ITRF2020框架(2015.0历元)下的三维坐标以及速度,将其框架历元转换为ITRF2014框架(2000.0历元)下的坐标。
(2) 方式二:获取站点ITRF2014框架(2010.0历元)下的三维坐标以及速度,将其框架历元转换为ITRF2014框架(2000.0历元)下的坐标。
(3) 方式三:获取站点ITRF2014框架(2010.0历元)下的三维坐标以及速度,将其框架历元转换为ITRF97框架(2000.0历元)下的坐标。
将框架历元转换后的坐标与已知成果进行比较,即可验证所选IGS站点的稳定性。从表2和表3可知,通过框架历元转换获得的坐标精度为厘米级,方式一最大点位误差为3.75 cm(站点BJFS),方式二比较结果最大点位误差为4.94 cm(站点PIMO),方式三比较结果最大点位误差为2.76 cm(站点IISC),证明了此法获取CGCS2000坐标精度的可靠性。最后根据工程项目所在位置,在此41个IGS站点中选用合适的GNSS基准站作为联测点,用于计算未知控制点CGCS2000坐标。
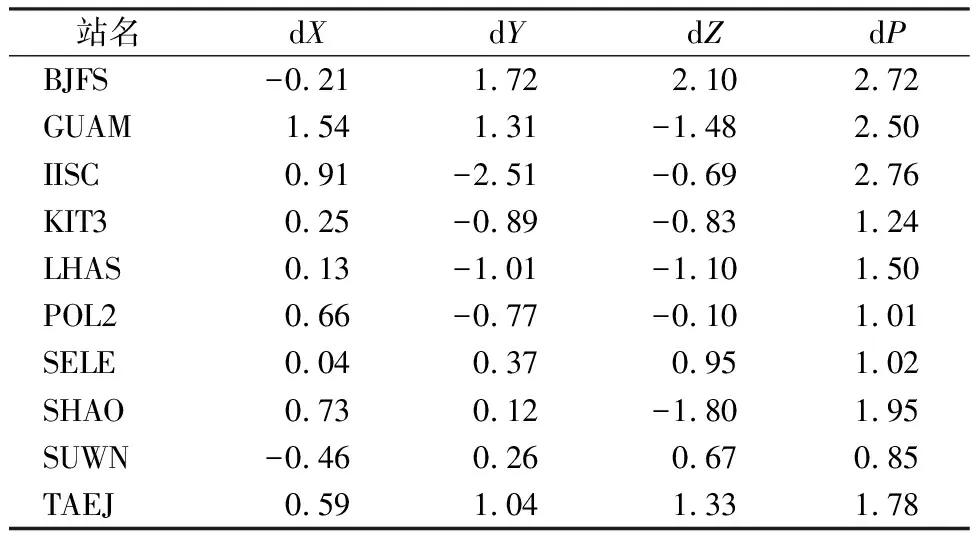
表3 方式三转换结果与已知成果比较差值Tab.3 Difference between the conversion result of method 3 and the known result cm
3 基线解算策略和精度评定方法
3.1 基线解算策略
利用GAMIT软件,采用IGS精密星历,使用批处理方式进行基线解算。在Station.info文件中配置好各个控制点测站信息,包括控制点编号和点名、观测时间段、仪器类型、天线类型、天线高以及其量测方式等。在Process.defaults文件中设置好采样率、观测历元时长以及基线开始处理时间等。Site.defaults设置好rinex数据来源方式、参与平差的控制点和已知点。在Sestbl表中,观测值选项(Choice of observable)设定为LC_AUTCLN;试验选项(Choice of Experiment)设定为BASELINE。所有文件其余主要选项采用软件推荐的缺省值。
3.2 精度评定方法
标准化均方根误差NRMS值一般用来描述在单位时段内基线解算值与其加权平均值的偏离程度,是从历元的模糊度解算中得出的残差值,也是衡量解算质量的最主要指标之一[7]。NRMS值越小,基线解算精度越高。一般认为NRMS值不大于0.3说明解算成功,若数值大于0.5,说明解算过程中部分周跳可能未被探测修复,出现了某些参数数值偏差较大等异常,需检查原因,重新解算[7]。
4 控制点CGCS2000坐标的计算与验证
挑选5个区域的控制点进行静态测量,区域1~4控制点已知成果由权威机构解算获得,区域5已知成果为向测绘主管部门申请获取。5个区域的静态测量和GNSS基准站信息如表4所示。

表4 5个区域的静态测量信息和GNSS基准站信息Tab.4 Static measurement information and GNSS reference station information of five regions
利用GAMIT对各个区域静态测量数据和联测GNSS基准站数据进行基线处理,采用NRMS值来衡量基线处理的质量好坏,如表5所示,GAMIT软件基线解算的NRMS值均为0.19~0.21,这说明各个区域GNSS网的整体外业观测质量较高,基线解的精度好。利用GLOBK软件对各个区域基线处理后的结果进行平差处理,平差后获得各个控制点ITRF2014框架(当前历元)下坐标,接着计算控制点速度值,最后进行框架历元转换,获取观测控制点CGCS2000空间三维坐标和高斯平面坐标。
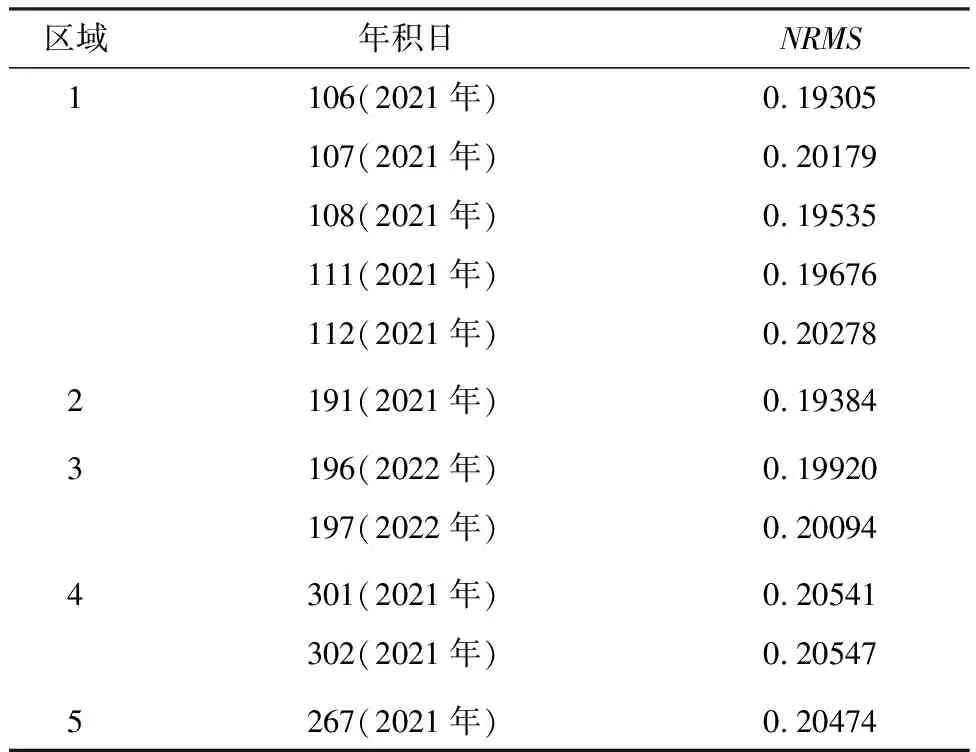
表5 基线处理精度统计Tab.5 Statistics of baseline processing accuracy
将控制点计算的CGCS2000坐标与已知成果比较,统计各个控制点点位较差及其均值如图2、表6所示。从比较成果可知:① 采用联测GNSS基准站方法求取控制点的CGCS2000坐标是可行的,平面精度效果较好,高程精度效果不佳;② 区域1~4空间三维点位较差dp基本都保持在5 cm以内,点位较差均值最大的是区域2(4.16cm),最小的是区域4(2.15 cm);③ 区域1~4高斯平面点位较差ds基本保持在3 cm以内,点位较差均值最大的是区域1(2.32 cm),最小的是区域3(0.47 cm);高程精度均值dH保持在4 cm以内;④ 由于区域2~4的已知成果也是采用GAMIT/GLOBK计算所得,平面点位较差最大是1.88 cm,精度在2 cm以内;但是因为联测的GNSS基准站和GAMIT/GLOBK软件数据处理设置参数不一致,高程精度比较差,基本保持在 5 cm 以内;⑤ 区域1已知成果是使用其他数据处理软件计算出来的,平面坐标存在X方向差别较大的现象,平面点位精度和高程精度都在3 cm以内;⑥ 区域5已知成果是向测绘主管部门申请获得,由于已知控制点都在高层房屋楼顶,埋设年代久远,计算成果与已知成果比较存在一定偏差,点位精度不大于5.5 cm。
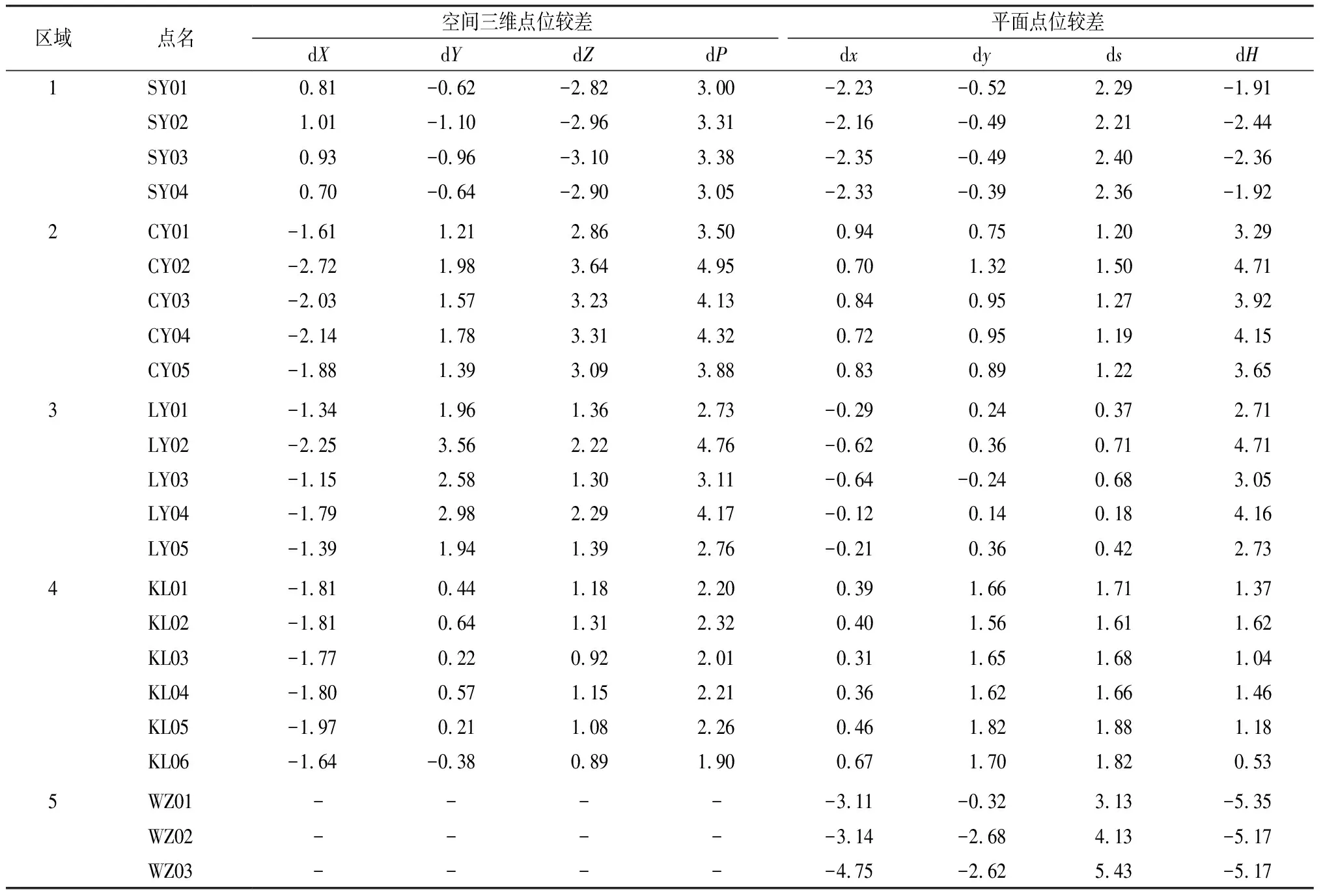
表6 联测GNSS基准站计算CGCS2000坐标成果与已知成果的比较Tab.6 Comparison of CGCS2000 coordinate results calculated by joint survey GNSS reference station with known results cm
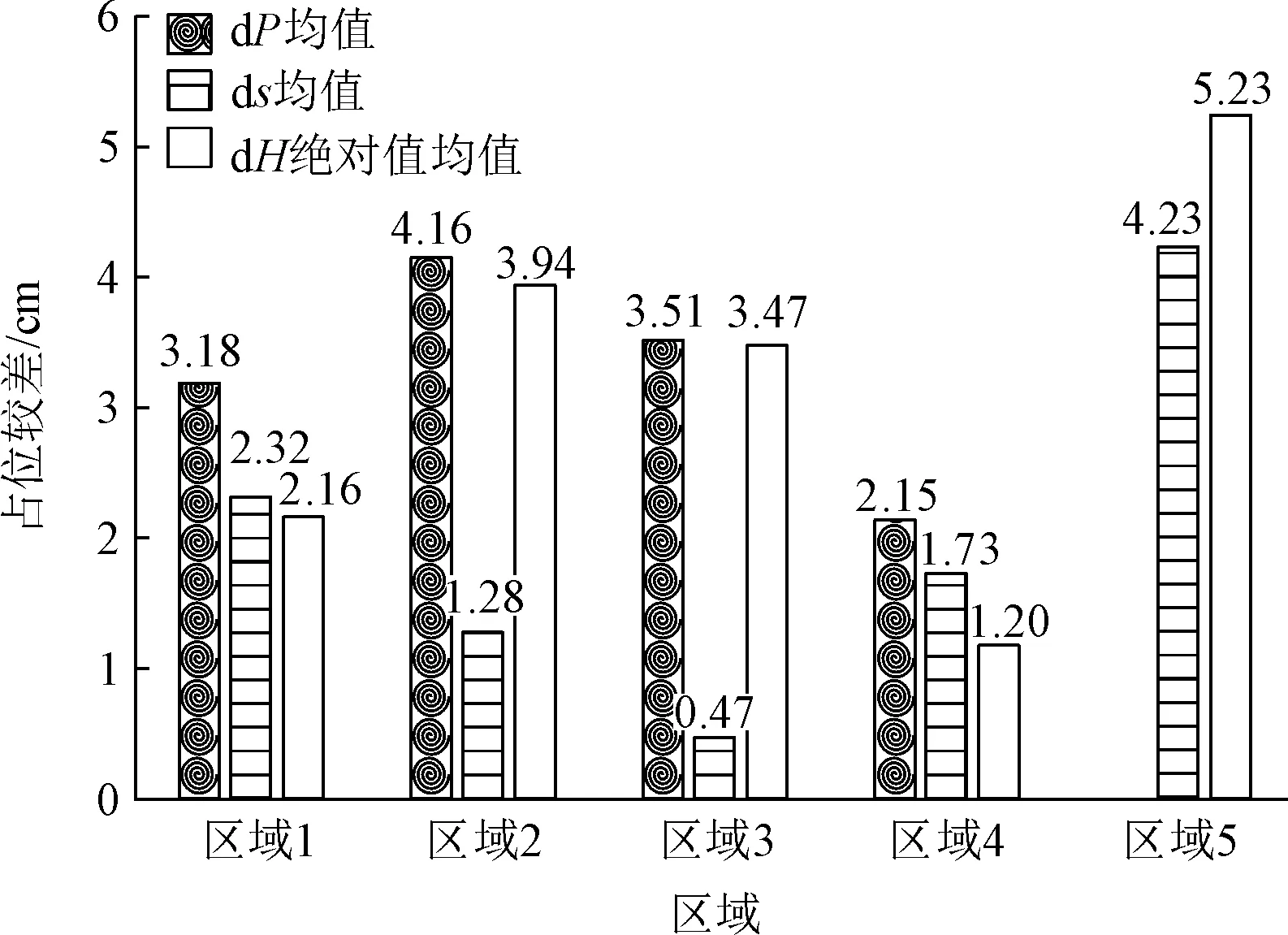
图2 点位较差均值统计Fig.2 Mean value statistics of point calibration difference
5 结 语
联测公开的GNSS基准站可以方便获取已知点对应ITRF框架当前历元下的三维空间坐标,通过GAMIT/GLOBK软件基线处理和平差计算,可获得未知控制点对应ITRF框架当前历元下的三维空间坐标,再进行框架历元转换,即可获得未知点的CGCS2000坐标。比较不同省份的5个区域计算成果与已知成果,结果表明:平面精度效果较好,基本保持在3 cm以内;高程精度效果略差,基本保持在5 cm以内。该方法利用GAMIT/GLOBK软件计算出控制点的CGCS2000坐标具有快捷性和高可靠性,其精度满足项目申报前期需要快速获取控制点CGCS2000坐标的需求,可用于项目控制点CGCS2000坐标的校核,也可用于某些中小型工程或者测区周边没有已知高等级控制点的区域。
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:40:24
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
制造技术与机床(2018年12期)2018-12-23 02:41:18
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
中国工程咨询(2017年12期)2017-01-31 02:56:54
测绘科学与工程(2016年4期)2016-04-17 06:51:08
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38
安徽地质(2016年4期)2016-02-27 06:18:21