基于慧鱼搭载的小型精密播种机
2023-11-14 12:05:30吴庆达潘雪荧
现代制造技术与装备 2023年9期
吴庆达 潘雪荧 王 柱
(聊城大学东昌学院,聊城 252000)
20 世纪90 年代以来,我国逐步推广精密播种机。精密播种机根据作物种类,分为玉米及大豆精密播种机、谷物(小麦)精密播种机等;根据配套动力,分为小型、中型和大型精密播种机;根据排种器形式,分为机械式和气力式两大类精密播种机,其中机械式又可分为锥盘式、纹盘式、水平圆盘式和带夹式等[1]。
随着现代高标准农田的建设和发展,加上我国地形多样、耕地种植分散、单个农户种植规模较小的特点,我国对小型播种机的需求量越来越大[2]。农作物播种作为农业生产中重要的一环,具有稳产保供、降本增效、节约资源、减少损耗等功能,因此利用播种机科学种植意义重大。精密播种可以保证种子在田间合理分布,播种量精确,株距均匀,播种深度一致,为种子的生长发育创造最佳条件,既节省了种子,又保证了作物稳产高产。因此,现代农业对小型精密播种机的需求越来越迫切[3-4]。
慧鱼创意组合模型涉及机械、电子、控制、气动、汽车技术、能源技术和机器人技术等领域,利用工业标准的基本构件,如机械元件、电气元件和气动元件,辅以传感器、控制器、执行器和软件设计机械结构[5]。文章基于慧鱼组件设计播种机的机械结构,编写了播种机的运行控制程序,并通过慧鱼组件搭建的播种机实物模型,展示了相应的功能,实现了开沟深度任意调节、定距播种、定量排种、覆土掩埋的功能,同时在结构上进行改进设计,实现了间作播种。
1 机械系统设计方案
根据国内外播种机的发展趋势,以通用性、适应性和结构简单、操作灵活为原则,设计了一款能同时完成播种施肥工作的小型精密播种机。精密播种机实物模型,如图1 所示。该机结构简单,能满足客户对小面积土地作业的操作灵活性需求。设计双沟道排种,可随意搭载合适的排种器,实现农作物的间作种植[6]。播种机在整体设计上采用分模块设计,各模块相连形成一个完整的系统。它主要包括开沟模块、种子下播模块、排肥模块和覆土模块。
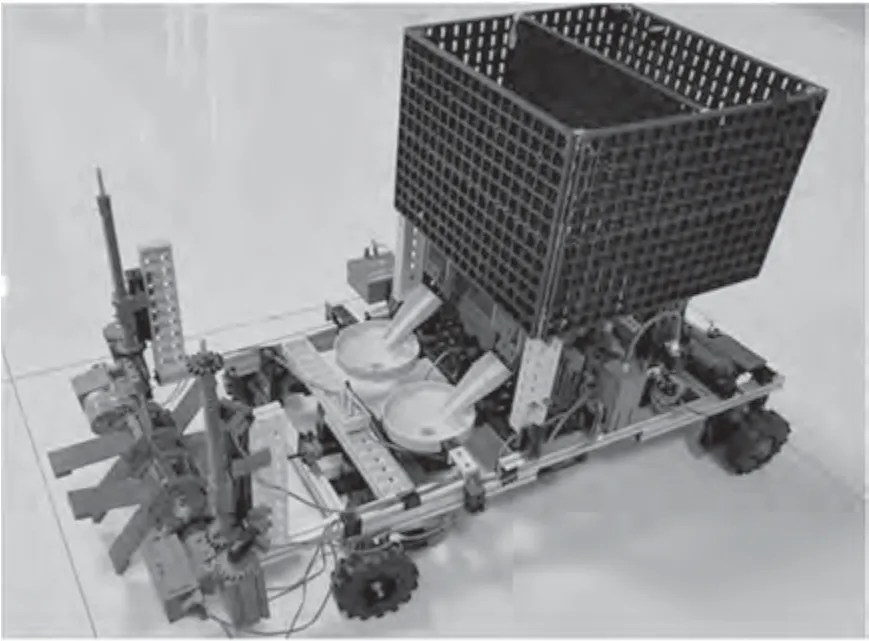
图1 精密播种机实物模型
1.1 开沟模块
小型精密播种机设计了双开沟结构(见图2),可同时进行双排开沟作业。开沟器的设计理念为旋转刨坑式,开沟器深度的调整依托螺旋传动机构,即螺母固定在机架上,螺杆做直线运动,从而实现开沟器的上下移动,达到控制调节播种深度的效果。
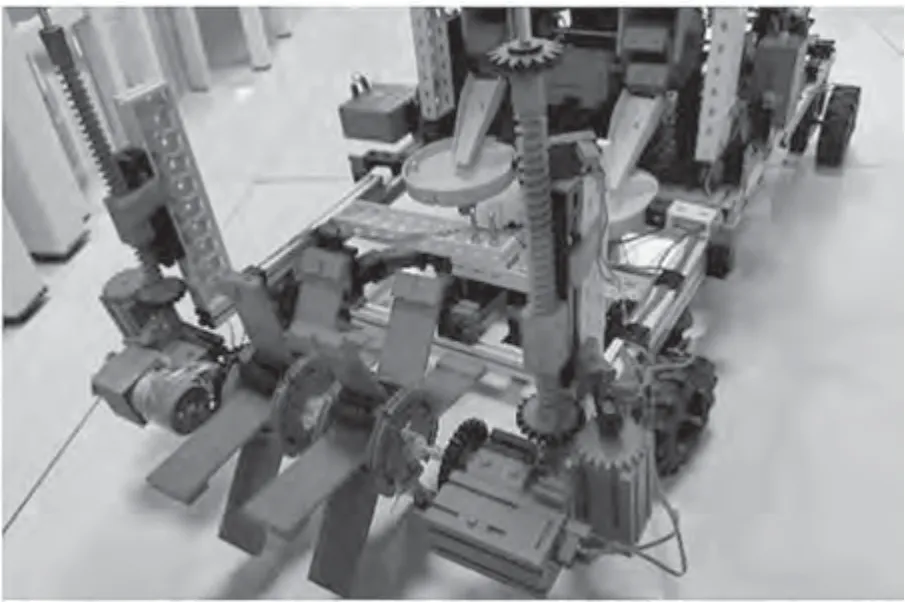
图2 开沟模块
1.2 种子下播模块
基于慧鱼组件搭建了排种器,如图3 所示。排种器与种箱相连,通过种子自身重力实现种子从种箱向排种器的自动下落。根据结构设计,排种器每次能够容纳3 粒种子。排种器下端直接与漏斗连接,通过导轨将种子输送到播种漏斗。每通过相同的时间间隔,控制器控制编码电机转过固定的角度,从而带动排种器转动固定角度,有效定量定距进行播种,是精密播种的重要一环。
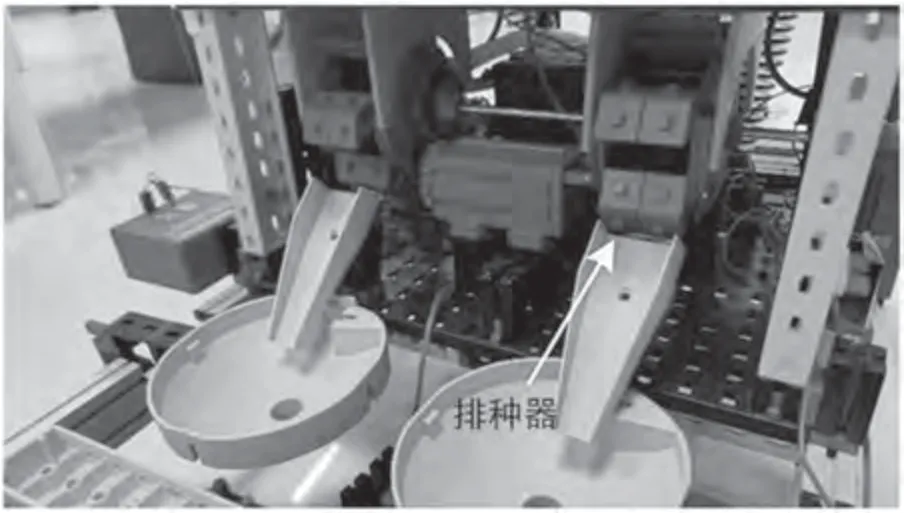
图3 种子下播模块
1.3 排肥模块
种肥箱一分为二,后面为肥箱,前面为种箱,如图4 所示。排肥器设计为气压撵推式,选用慧鱼中的自复位弹簧气缸、气阀、气泵组件搭建小型气动系统。当排种器工作时,气阀关闭,气缸在自复位弹簧的作用下收起,实现肥料的下放。该模块不仅可以松散化肥料防止粘黏,还能有效控制肥料与种子之间的间距,起到保护种子的作用。
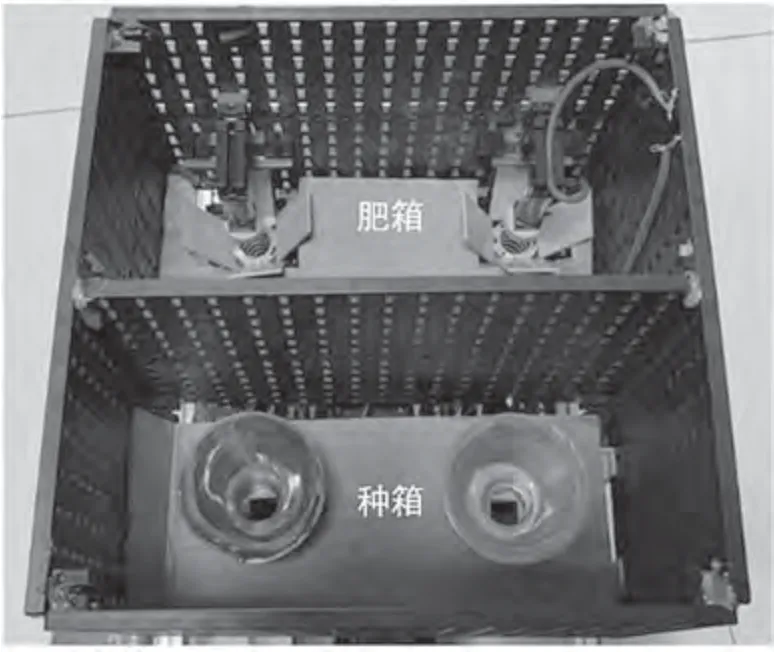
图4 种肥箱
1.4 覆土模块
覆土模块如图5 所示。它在机体后方用双边齿条与覆土板连接,通过双边齿条的上下移动控制覆土量及覆土厚度,为作物生长提供合适的环境。

图5 覆土模块
2 控制程序设计
2.1 执行部件配置
精密播种机播种作业由各个机构协同运作完成,各机构执行部件配置如表1 所示。
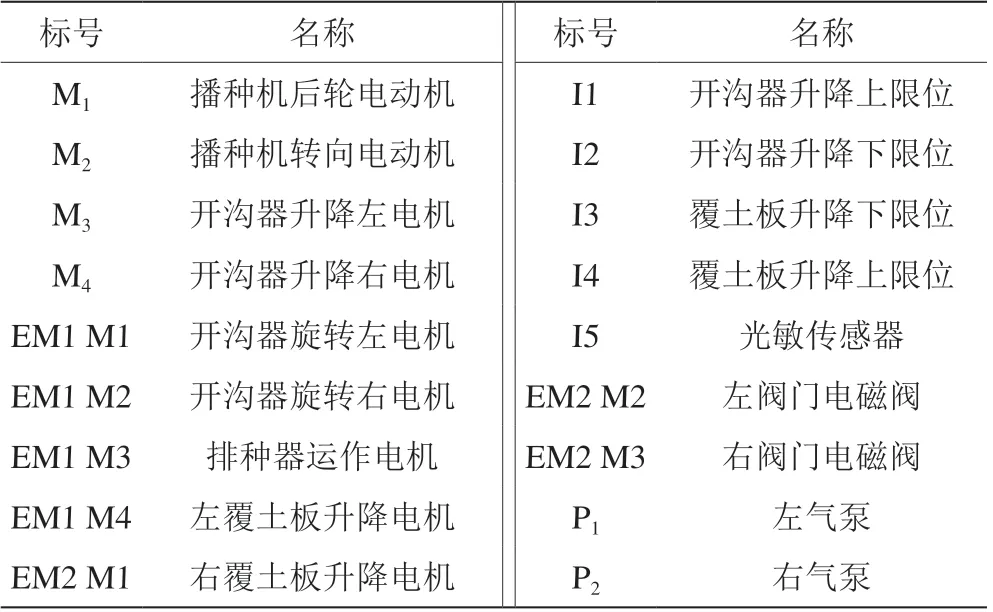
表1 执行部件配置表
2.2 控制程序设计
设计的小型精密播种机选用慧鱼TXT 控制器,利用ROBO PRO 软件编写精密播种的控制程序,如图6 所示。上电初始化完成后,播种开始,M1、M2电机开始运作,推动整机前进。M3、M4电机正传,带动螺旋传动机构运动使开沟器下放,当碰到底部限位开关时停止下放。在下降过程中,M5、M6电机同时启动,开沟器正向旋转进行开沟。播种机前进,在前进过程中M8、M9电机启动,带动覆土板在双边齿条上向下运动,到达指定高度后停止下放。前进一段距离后,M7电机动作,带动排种器按照设定速度旋转开始排种。光敏传感器检测到排种一次后,电磁阀门动作一次,使得气压阀门间接动作定量排肥一次。到达耕地尽头时,M3、M4反转,开沟器提升,M5、M6停止运作。当最后一次排肥结束后,整机停止运作进入初始化状态,待机等待下一行的播种。
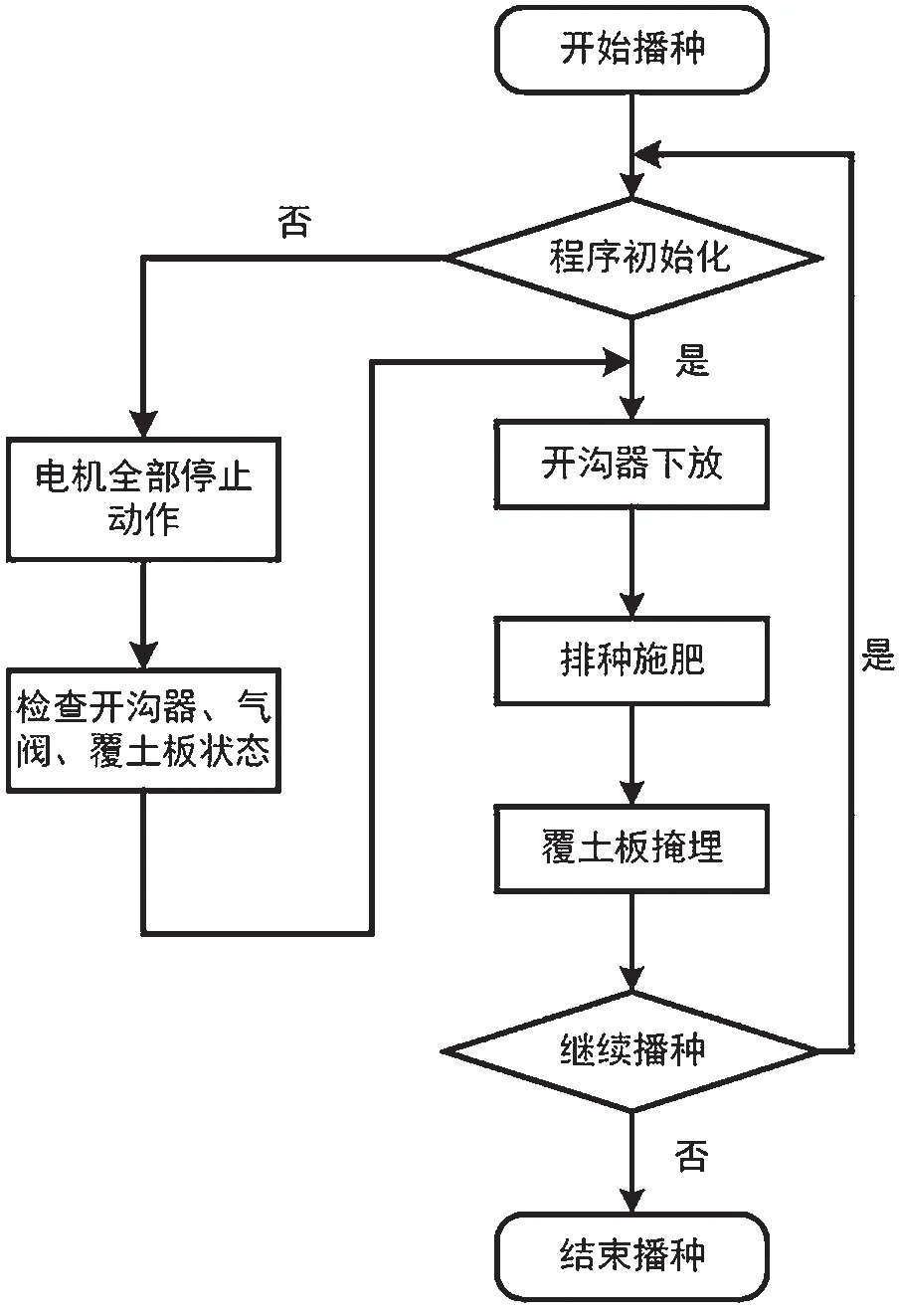
图6 播种机播种运行程序
2.3 各部分机构控制程序
初始化检测控制。启动后,M3、M4 电机反转,使开沟器上升,其余电机为停止状态,检测I1 数字量是否为1,是则检测I4,否则M3、M4 电机继续反转,直至开沟器升至上限位。然后检测I4 数字量是否为1,是则电机停止,否则EM1 M4、EM2 M1 电机继续反转,直至覆土板升至上限位。使EM2 M2、EM2 M3 电磁阀处于工作状态,肥箱气压阀门为常闭状态。初始化程序,如图7 所示。
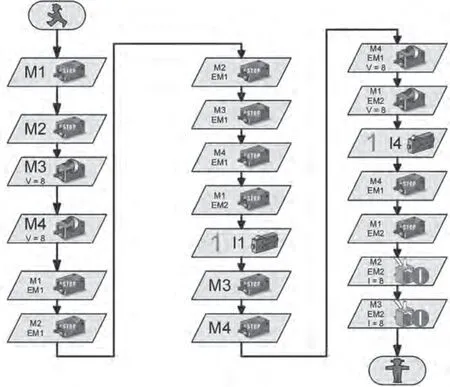
图7 初始化程序
前进动力系统。M1正转,播种机前进;M1反转,播种机倒退。M2正转,左向转弯;M2反转,右向转弯。也可将自动控制模式电路切换至蓝牙控制器,利用慧鱼组件自带一体蓝牙控制装置,控制机身前进、后退及转向。
开沟机构动作。在播种机接收到播种信号后,M3、M4动作,使开沟器下降,在SQ2数字量为1 时停止。同时,M5、M6动作,进行开沟掘土。
覆土板机构。当播种机前进到达设定时间后,M8、M9下降动作,在SQ3输入数字量为1 时停止下降。
排肥排种机构。在播种机前进一定距离后,光敏传感器I5 接收到种子下播信号,EM1 M3 动作,进行播种。旋转同时,EM2 M2、EM2 M3 电磁阀关闭,气压阀门打开,实现施肥,施肥固定时间,气压阀门关闭。排种器每间隔固定的时间进行旋转,实现种子的精准定距播种,依次循环。
排肥排种机构。在播种机前进一定距离后,M7动作,排种器每间隔固定的时间进行旋转,实现种子的精准定距播种。旋转同时光敏传感器接收到信号,YV1、YV2电磁阀关闭,气压阀门打开,实现施肥。随后,气压阀门关闭,依次循环。
当播种到耕地尽头时,M3、M4反向动作,使开沟器上升,同时M5、M6停止动作使开沟器停止旋转。当SQ1为1 时,M3、M4停止动作。当排肥器排完最后一株肥料时,排种器驱动电机M7停止工作,M8、M9反向动作。当触碰到行程开关SQ4时,M8、M9停止动作。程序回到初始化,准备下一行播种或结束播种。播种机整体运行程序,如图8 所示。
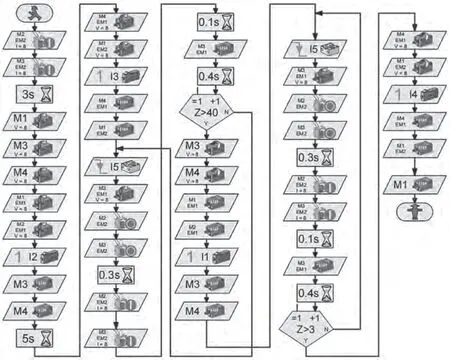
图8 播种机整体运行程序
3 结语
基于慧鱼技术设计的小型精密播种机,实现了开沟深度任意调节、定距播种、定量排种、覆土掩埋的功能,并设计了双排开沟器,实现了播种机的间作播种。
猜你喜欢
新疆农机化(2022年1期)2022-03-02 09:44:18
中阿科技论坛(中英文)(2021年2期)2021-03-17 02:40:42
今日农业(2020年22期)2020-12-14 16:45:58
农机化研究(2020年2期)2020-10-17 00:59:16
时代农机(2019年5期)2019-02-11 10:52:34
农业工程学报(2018年24期)2019-01-14 10:42:32
农机化研究(2018年8期)2018-07-10 11:39:26
雷锋(2016年4期)2016-05-30 02:09:48
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:02
学习月刊(2015年10期)2015-07-09 03:35:12