矿用带式输送机巡检机器人系统设计与研究
2023-11-10 10:33:08米丽
江西煤炭科技 2023年4期
米 丽
(山西西山煤电股份有限公司西铭矿机电部,山西 太原 030052)
随着长运距、大运量、高速度的带式输送机在煤矿运输系统中的应用,带式输送机运行安全性及可靠性问题日益凸显。因高负荷下不间断运行及井下恶劣环境影响,带式输送机易发生堆煤、输送带跑偏、撕裂等故障,故障类型复杂,且诊断难度较大,因此对带式输送机进行巡检是排查故障隐患、提高运行安全可靠性的重要手段。目前针对带式输送机的巡检方法仍以人工定期巡检为主,因巡检线路长且巡检环境恶劣,巡检不到位、巡检效率低等问题突出,且巡检人员人身安全存在隐患[1-3]。以摄像机为主要监测设备的图像监控系统需安装较多摄像头及传感器,系统成本较大、功能单一,且存在较多监控死角,无法满足对带式输送机的全行程监控。
针对上述问题,本文对带式输送机巡检机器人技术进行了深入研究,采用钢绳牵引结合行走轨道的方案对巡检机器人系统进行优化设计,解决了以往巡检机器人续航里程短的问题。同时采用多传感器融合技术对带式输送机工作环境、关键部件运行参数进行实时监测,并具备现场视频监控及跑偏故障诊断等功能,实现对带式输送机全行程、全天候的多方位智能监测,保障带式输送机安全、稳定、高效运行。
1 系统实施方案与整体架构
带式输送机在井下的运行环境复杂恶劣,巷道内有害及可燃性气体及温湿度情况均会对带式输送机的工况造成影响,为保证带式输送机安全稳定运行,依托巡检机器人建立的移动监测平台应具备以下功能:
1)环境参数实时监测
巡检机器人可对带式输送机现场的CH4、CO等易燃有害气体浓度及温湿度进行检测,并通过地面监控平台进行远程监测,具备超限报警功能。
2)故障报警诊断
系统结合机器视觉技术通过巡检机器人对皮带运行状态进行检测,上位机通过智能算法对故障进行分级诊断,确定准确故障地点并发出报警信号。
3)现场视频图像监控
系统采用巡检机器人布置的高清摄像头对带式输送机沿线现场环境进行视频及图像的采集,上位机可根据需求选择图像灰度,进一步提高监控性能。
通过上述系统功能分析,采用分布式结构对监测系统进行架构,系统分为巡检机器人现场检测平台及地面上位机监控平台两部分,系统整体结构如图1 所示。
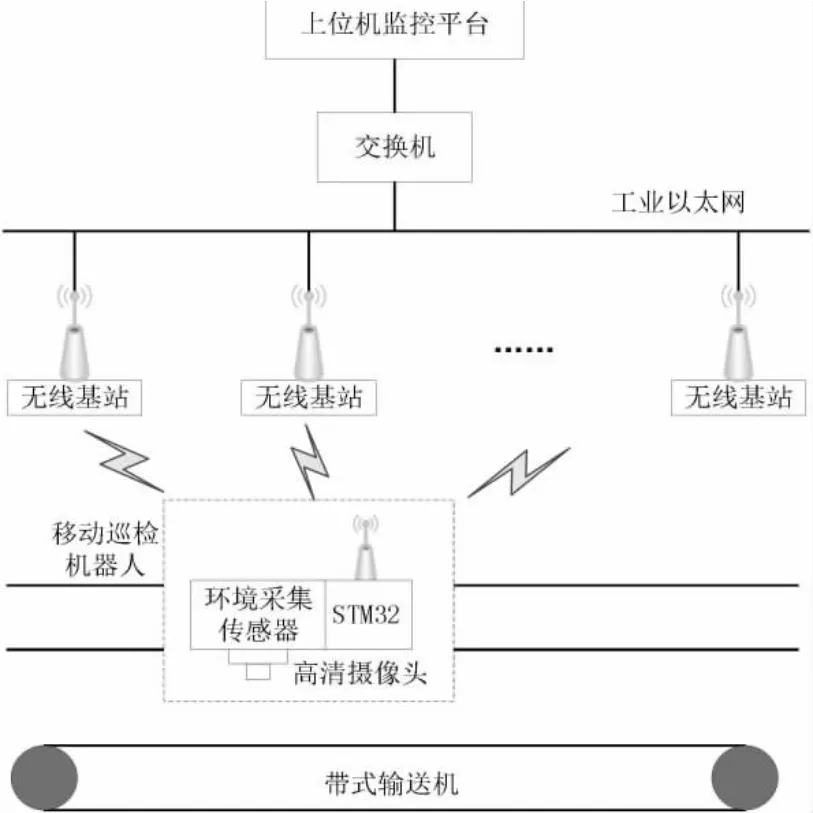
图1 巡检机器人监测系统总体结构
为应对大倾角、长距离巡检需求,采用钢丝绳牵引式移动巡检机器人作为井下数据采集装置,将巡检机器人固定在钢丝绳上,通过电机牵引钢丝绳驱动机器人在带式输送机上方移动。巡检机器人主要由采集环境参数的气体及温湿度等传感器、STM32 控制芯片、无线传感装置、高清摄像头等组成。巡检机器人将带式输送机沿线环境参数、现场视频及图像等数据采集后经STM32 单片机处理,通过无线网络上传至巷道内各个无线基站中,最终通过工业以太网上传至地面监控平台,实现远程监测及故障诊断。系统采用无线网络+ 工业以太网的组合通信网络,既可保证移动巡检装置的信号灵活传输需要,又可保证传输信号的可靠性。
2 巡检机器人监测系统设计
2.1 系统硬件选型与设计
巡检机器人的硬件设计主要集中于控制器、各类传感器及摄像头等功能部件。为降低系统通信压力及上位机信号处理难度,本系统采用分布式架构,首先由巡检机器人内置的控制器对图像视频、环境参数进行提取和处理计算,并将所得结果上传至上位机进行实时监测及故障诊断分析。为满足处理速度及模拟信号输入需求,选用32 位STM32F103 RCT6 型MCU 作为巡检机器人控制器,其内部具备12 位ADC 模数转换器,可将传感器输出的模拟电压信号转化为12 位二进制数字量,ADC 具备16 个外部通道,对应片上不同的I/O端口,可满足本系统信号传输需求。
带式输送机工作环境中的有害、可燃气体及烟雾浓度通过巡检机器人内置的各类气体传感器进行检测,环境温湿度参数由内置温湿度传感器进行采集,实现对带式输送机环境参数的全面智能检测。针对带式输送机皮带跑偏、皮带纵向撕裂、托辊故障、设备局部温度过高等故障,通过巡检机器人集成的高清防爆摄像头、红外热成像仪对带式输送机运行图像及设备温度进行监测,从而对各类故障进行有效识别,巡检机器人传感器及检测设备选型如表1 所示。
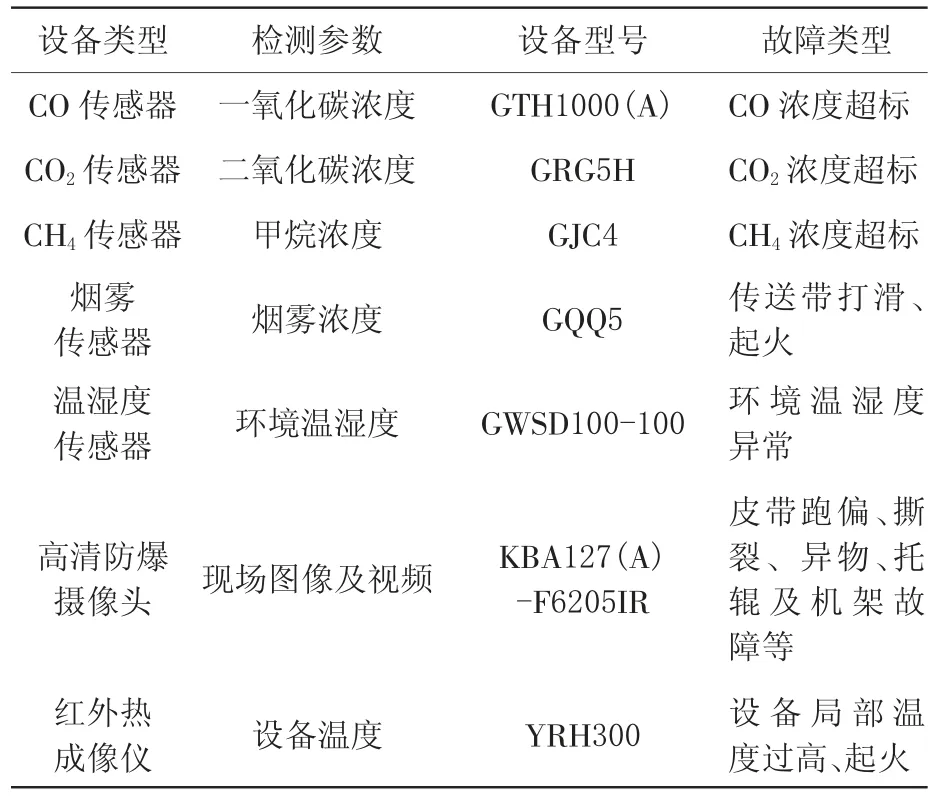
表1 巡检机器人传感器及检测设备选型
2.2 系统软件方案设计
本系统采用MATLAB 软件对上位机程序进行开发,用于接收井下巡检机器人上传的图像视频信号及环境参数,并以图像信号为依据进行数据处理,实现带式输送机故障的分级诊断,上位机主程序流程如图2 所示。
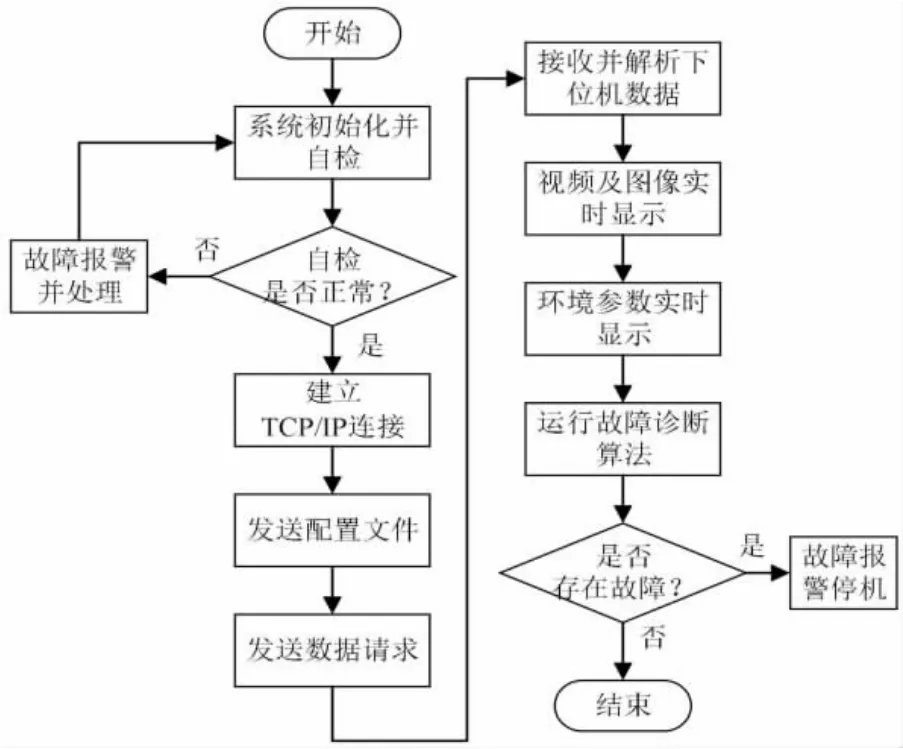
图2 系统上位机主程序流程
由图可知,上位机主程序在初始化并自检正常后,通过MATLAB 集成的TCP/IP 工具箱与巡检机器人建立以太网通信,并向下位机发送图像格式等配置数据,配置完成后向下位机发送数据传输请求,当上位机接收到数据后将视频图像进行解析并还原为视频流,并将环境参数进行实时更新,最终由上位机搭载的故障诊断算法对输送机故障进行分级诊断,并发出报警停车。
3 系统应用效果
为验证本系统可行性及实际应用效果,以传送带宽度为2 m、额定带速1.25 m/s 的带式输送机作为控制对象,对巡检机器人监测系统进行实际运行测试,巡检机器人钢丝绳水平牵引速度设置为0.4 m/s。系统运行后,巡检机器人可按照设定速度稳定行走于带式输送机上方,并通过监控图像对传送带跑偏角度及跑偏位移量进行实时计算,诊断是否存在跑偏故障。设置带式输送机空载及承重两种工况下传送带的跑偏量监测实验,实验数据如表2 所示。
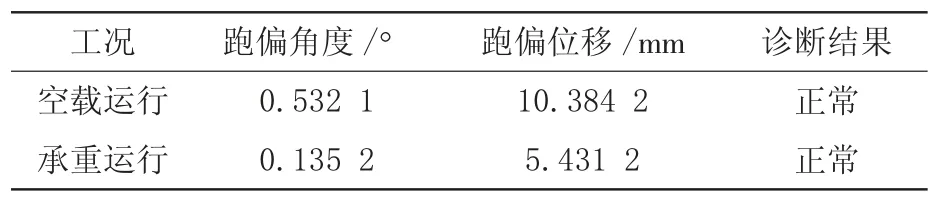
表2 两种工况下传送带跑偏故障监测结果
除故障检测诊断外,巡检机器人可对带式输送机温湿度及气体浓度等环境参数进行实时采集检测,为验证系统环境监测功能,在带式输送机以1.25 m/s 额定带速运行、巡检机器人以0.4 m/s 行走为实验条件设置了8 组运行实验,由巡检机器人对环境参数进行采集,实验结果如表3 所示。由于实验过程中CH4浓度未超过1 000 ppm,未达到传感器检测量程,因此检测值为0。
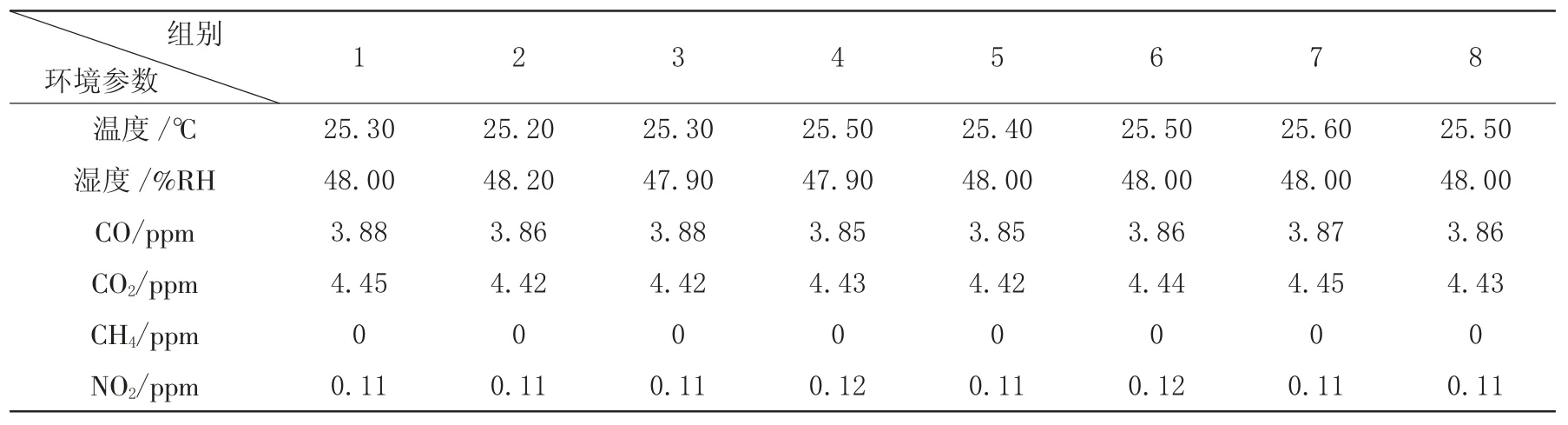
表3 环境参数检测实验结果
综上所述,系统可对带式输送机皮带跑偏角度及跑偏位移进行精准测量,可对跑偏故障进行准确诊断。在环境参数采集方面,系统对带式输送机环境温湿度检测准确,气体浓度变化测量稳定,具备精确可靠的环境参数检测功能。
4 结语
针对井下带式输送机巡检困难的问题,设计了一套基于移动巡检机器人的带式输送机监测系统。该系统采用分布式架构及组合式通信网络,有效提高了系统监测性能及通信能力,经实际运行测试,系统能对传送带故障进行可靠监测诊断,可实现对多种环境参数的精确可靠测量,具有实际应用价值。
猜你喜欢
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29 09:13:56
自动化学报(2019年12期)2020-01-19 05:18:14
冶金设备(2019年6期)2019-12-25 03:08:52
制造技术与机床(2019年11期)2019-12-04 05:49:50
电子制作(2019年7期)2019-04-25 13:17:10
车迷(2018年12期)2018-07-26 00:42:22
电子测试(2018年4期)2018-05-09 07:27:32
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
橡胶工业(2015年6期)2015-07-29 09:20:32