具备水下超声波测距的太阳能船舶模型设计
2023-11-08 01:59赵志宇贺学剑
科技创新与生产力 2023年10期
赵志宇,贺学剑
(河南林业职业学院信艺系,河南 洛阳 471002)
随着水下机器人和无线网络技术的发展,人们越来越关注密集的移动水上传感器网络的开发和部署[1-2]。超声波由于具有快速、方便和易于实时控制的优点,通常被用于测量距离,满足工业和实际测量精度的要求。超声波测距不受光、电磁场、烟雾、黑暗、被测物体颜色等因素的影响,更容易获取近距离超声波的测距信息,被广泛应用于反向防撞系统、机器人导航、海洋勘测等[3]。
由于超声波具有波长短、强度大、能量容易聚焦的特点,同时超声波还可以大致以一条线延伸,在液体中能量衰减小于电磁波,会引起强烈的振动和特殊效果,因此采用高频和低功率超声波进行水下测距,具有较好的抗干扰能力。
近年来,太阳能这种可持续的清洁能源作为主要能量系统已经被用于旅游观光船、短途渡轮等小型船舶上,同时也可作为船舶照明、驾驶和空调系统等的辅助能源。随着可再生能源市场的快速发展,太阳能跟踪系统已成为重点发展方向之一,提高太阳能收集的效率及跟踪硬件的可用性将成为未来技术发展的新趋势。
1 超声波测距原理
具有良好的自相关特性的序列(如最大长度序列) 可以用于超声波在水下测距中,通过计算发射和接收信号之间的交叉耦合来测量发射机和接收机之间的声信号的传输时间。
超声波测距的基本工作原理:超声波换能器向一个方向发射超声波,并在发射时开始计时。超声波一旦遇到障碍物就立刻返回,超声波换能器接收到反射波立即停止计时。通过这种方式,获得传输时间t(s)。以超声速度为c(m/s),可以根据传输时间t 得出公式:L=c×t×2-1。因为超声波的速度是恒定的,所以如何获得准确的时间非常重要。
2 系统硬件设计
2.1 船舶模型系统框图
船舶模型系统(见图1) 主要包括供电模块、船模电源模块、太阳跟踪模块和自动避障模块四个模块。首先,供电模块使用锂电池为系统提供能量,通过太阳能电池板收集太阳能为系统充电,太阳能经过能量转换装置变为电能。其次,船模电源模块采用数字直流伺服系统驱动螺旋桨,实现无级调速和零制动功能。最后,在具有反馈的超声波换能器的帮助下实现自动避障。
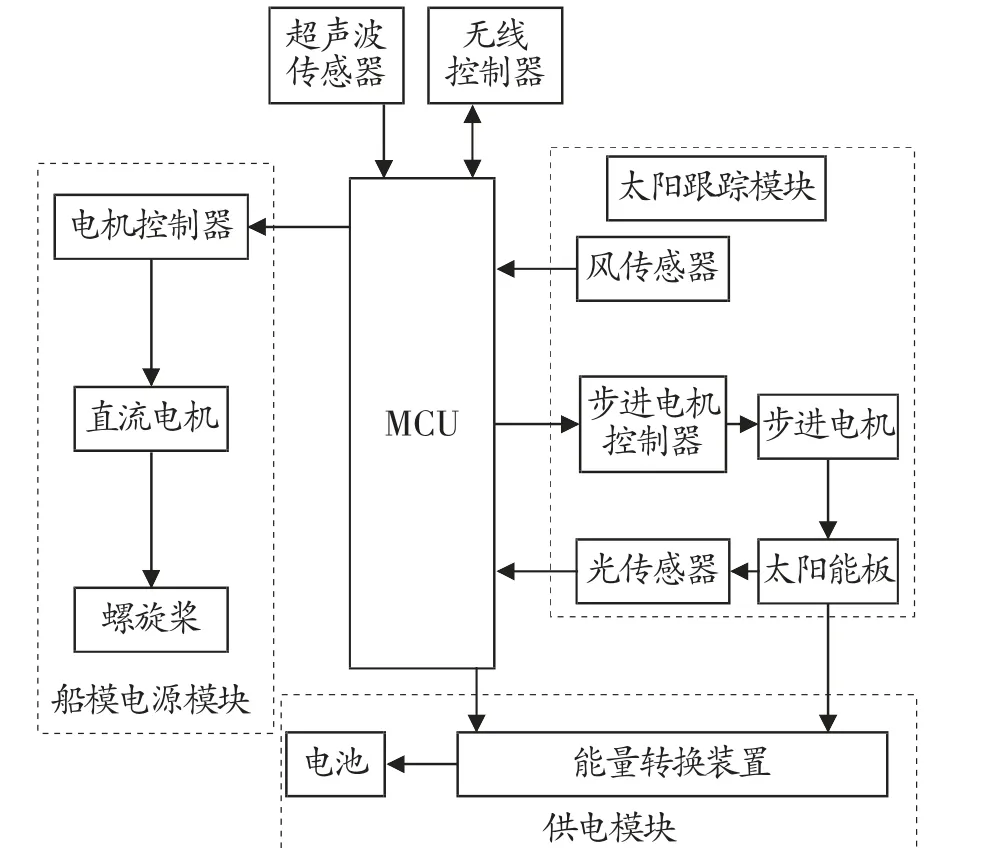
图1 船舶模型系统框图
2.2 超声波测距相关电路设计
超声波测距核心电路由发射电路、放大电路、滤波电路、信号调理电路和显示电路组成。其中发射电路有两种,一种是连续波发射电路,另一种是脉波发射电路。由于考虑到系统的超声波换能器同时具有收发功能,因此采用第二种发射电路。放大电路分为两级放大器,总放大倍数为1 000(60 dB)倍,第一级为10 倍,第二级为100 倍,通过使用检测和阈值调整电路将信号有效放大并传送到微控制单元(Microcontroller Unit,MCU)。
滤波电路的主要作用是通过特定频率信号并抑制其他频率信号。来自信号调理电路的信号将最终发送到MCU,因此必须是逻辑信号。将滤波后的电压信号发送到电压比较器,与阈值电压进行比较,以确定回波到达与否,然后进行信号采样。阈值电压与传播距离、放大倍率相关联。经过大量试验,系统的选定阈值电压Vg=2.2 V。首先将接收到的滤波信号与阈值电压进行比较,如果峰值电压大于Vg,则接收到回波。然后启动MCU 的外部中断程序(INTI),停止计时并计算发射到接收的时间,也是超声波的传输时间,最后使用4-LED 数字管显示测量距离。
2.3 太阳自动跟踪设备设计
设计的光电控制采用程序跟踪和传感器跟踪相结合的控制方式,由程序实现自动控制。基于光学传感器的太阳能电池板,通过MCU 控制步进电机实现其自动定位和纠错。
该装置(见图2) 由紧固件(如星形支架支撑太阳能电池板和底座)、步进电机1、步进电机2 和驱动结构组成。星形支架结构简单,稳定性好,特别是轻型装置,减少了太阳能电池板调整过程的能量损耗。控制系统的自动跟踪操作主要由步进电机1 和2 组成。步进电机1 和驱动结构控制主要用于调整跟踪太阳能电池板的偏转方位角,步进电机2和驱动结构控制用于调整太阳能电池板的高度角。系统通过及时调整太阳能电池板的偏转方位角和高度角,实现高效的光电转换。该系统采用硅光电池传感器检测亚太阳点,采用这种方式,系统可以自动跟踪太阳光线。

图2 太阳自动跟踪的结构
测量光强度水平是开发太阳能潜力预测数据库的重要因素之一。随着光强的变化,硅光电管的输出电压在一定范围内变化,但其输出电压值不容易被检测到,可以将光输出量转换为电压,经放大、低通滤波、AD 转换,得到数字信号来替代输出电压。硅光电池以90 度的间隔放置在圆筒的内壁上。如果太阳能电池板和光线不是垂直的,硅光电池产生的相对电压信号强度会有明显的差异。
3 系统软件设计
测量程序流程见图3。在测量开始时,首先计数器清零并发出超声波,同时启动MCU 内部的定时器(T0),用于记录超声波的收发时间。当超声波换能器接收到反射波时,会在接收电路的输出端产生负跳变,并在溢出中断(INTO) 上产生一个中断请求信号。然后MCU 响应外部中断请求并执行外部终端服务子程序,停止计数和发射,读取时差。最后使用公式计算距离并在数字管上显示结果。
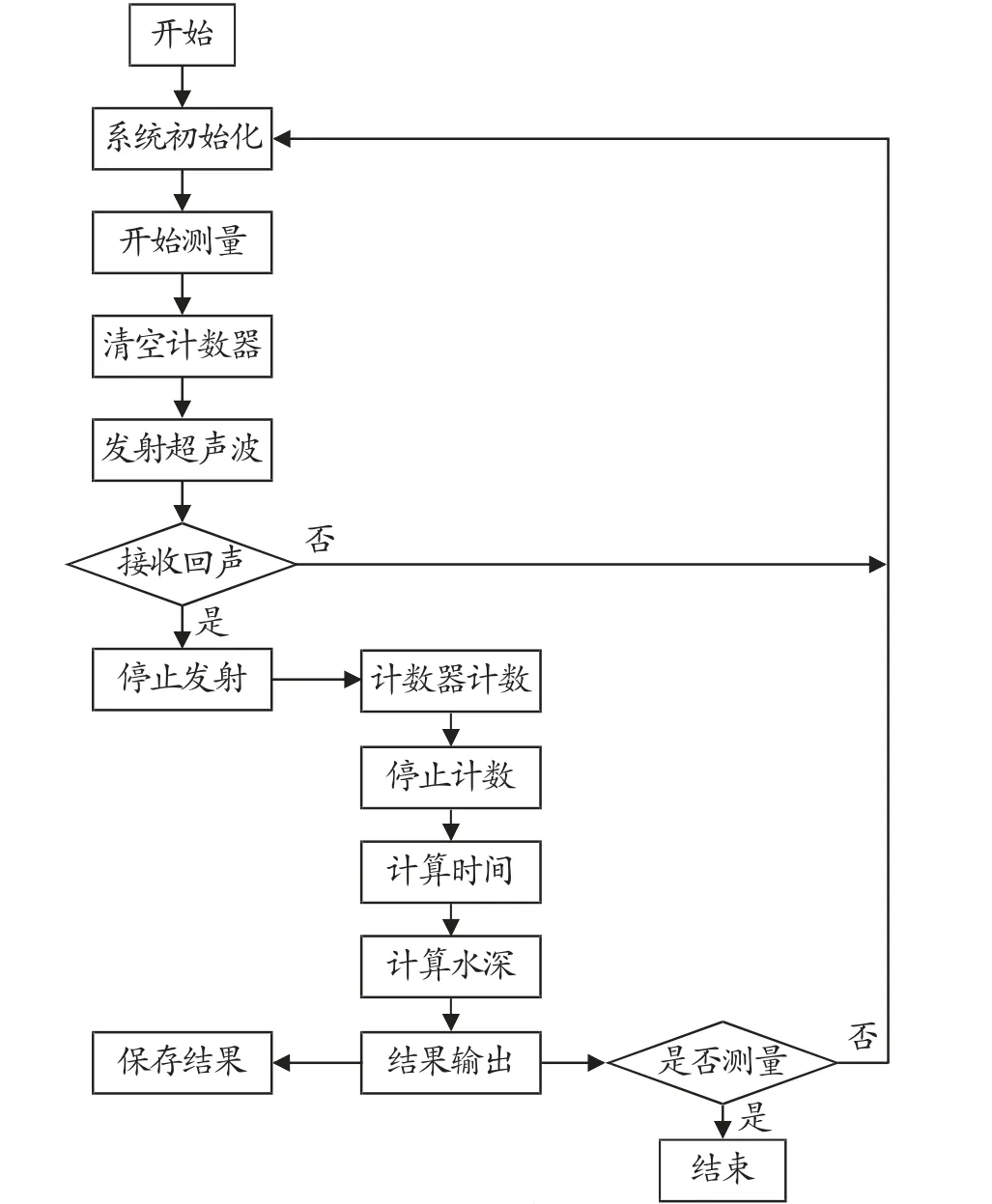
图3 测量程序流程图
4 测量数据和结果分析
超声波换能器的类型是DYW-IM,其中心频率为200 kHz,距离测量的实验结果见表1。从表1可以看出,在150 cm 的测量范围内,结果准确度都在3 cm 以内。如果测量范围太大,应采用低频超声波换能器,其测量范围大于高频超声波换能器。声波随距离的增加而逐渐衰减,绝对误差越大衰减越明显。
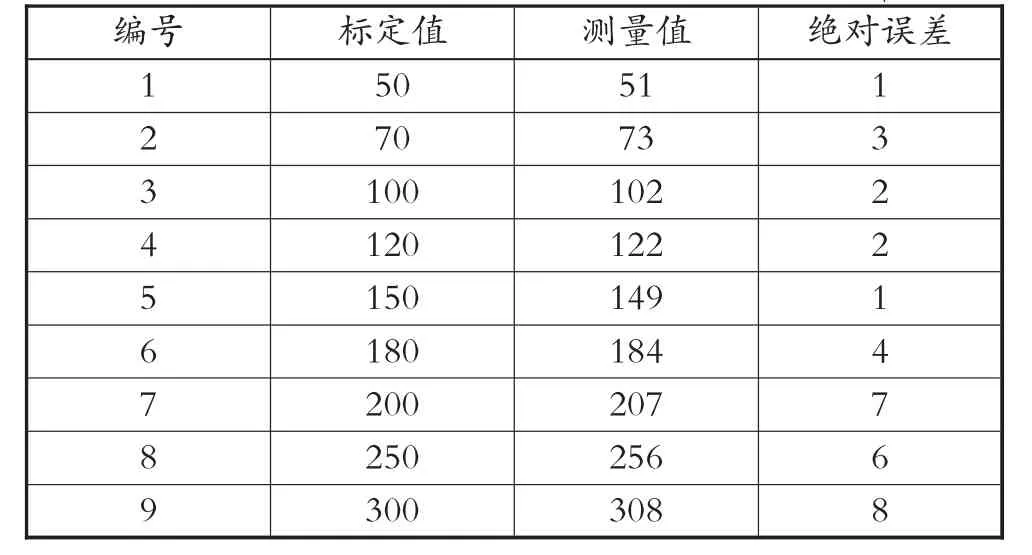
表1 距离测量实验结果单位:cm
其他可以提高测量准确性的方法。
1) 改进算术是一种有效的方法。例如,连续离散小波变换和完美滤波技术都可以实现更高的精度。小波分析(WT),一种新的分析方法,在时域和频域都具有良好的局部性质。其主要特点是可以通过转型充分突出问题的一些方面。WT 继承和发展了傅立叶变换的思想,同时克服了窗口大小与频率不一致的缺点。它可以提供频率变化的“时频”窗口,这是信号时频分析和处理的理想工具。
2) 滤波是抑制和防止干扰的重要措施,可以滤除信号中的特定频带。卡尔曼滤波是最广泛使用的滤波方法,是一种使用线性系统状态方程的算法,通过输入和输出数据对系统进行最佳估计,在通信,导航,指导,控制等诸多领域得到了很好的应用[4]。
3) 修补硬件也是提高测量精度的好方法。例如,超声波传输速度受水温影响,可以通过系统对水温进行补偿。
5 结束语
该设计将水下超声波测距技术和船舶模型平台相结合,系统采用太阳能供电,使得系统能够持续稳定运行。该系统可以在无人的情况下对小面积的水深进行测量。特别是探索一些未知和危险水域时,这个系统是非常实用的。
猜你喜欢
军事文摘(2021年18期)2021-12-02
新能源科技(2021年8期)2021-04-02
科学(2020年3期)2020-01-06
知识就是力量(2017年12期)2018-01-15
声学与电子工程(2017年1期)2017-06-22
声学与电子工程(2017年1期)2017-06-22
电子制作(2017年7期)2017-06-05
雷达与对抗(2015年3期)2015-12-09
电源技术(2015年2期)2015-08-22
电源技术(2015年2期)2015-08-22