三维激光扫描技术在建筑立面测绘中的应用研究
2023-11-08 01:59陈国忠林佳黎
科技创新与生产力 2023年10期
林 斌,陈国忠,林佳黎
(1.福建省地质测绘院,福建 福州 350011;2.福建山水测绘地理信息有限公司,福建 福州 350011)
建筑立面测绘对当前城市建筑修缮与改造具有直接影响,能够为其提供精度较高的测绘数据,帮助绘制建筑物图件。当前,建筑立面测绘方法种类较多,例如建筑立面全站仪测量、建筑立面近景摄影测量、三维激光扫描等。其中,三维激光扫描技术应用范围较为广泛,测绘精度较高,能够精确地反映建筑立面的各项数据[1]。三维激光扫描系统由激光扫描设备以及相应的配套软件共同构成,通过激光发射器实时发出脉冲激光信号,经过投射、漫反射与扫描,得到建筑立面测绘数据及建筑立面特征。现阶段,三维激光扫描技术在实际工程应用中仍然存在一些缺陷,无法为建筑修缮与改造提供精度较高的测绘数据。基于此,本文以R 老旧小区改造建筑立面测绘工程项目为例,深入开展了三维激光扫描技术在测绘中的应用探究。
1 设计三维激光扫描系统
在建筑立面测绘中,三维激光扫描系统设计得是否合理至关重要,直接影响了建筑立面测绘结果的精度[2]。基于此,本文在三维激光扫描系统设计中,选取与较传统扫描系统相比,精度与性能更高的设备,提高系统运行质量与效率,为系统的高效运行提供基础保障[3]。三维激光扫描系统使用设备优化选型如下:扫描仪,W1200 Pro;控制器,LMK-5104RL3A;激光发射接收装置;CCD 相机,OSTTZ200H2;计算机系统,Windows7。基于激光测距原理,设置建筑立面目标物上某点P,建立建筑立面空间点的三维几何关系,如图1 所示。
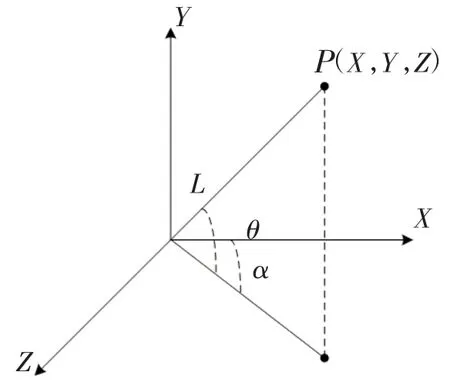
图1 建筑立面空间点三维几何关系示意图
图1 中,表示三维激光扫描系统中激光发射器到建筑立面目标物上任意点P 与扫描仪之间的距离;表示三维激光扫描系统控制编码器同步测量激光脉冲横向扫描角度;表示三维激光扫描系统控制编码器同步测量激光脉冲纵向扫描角度。根据扫描仪三维坐标计算原理,计算建筑立面目标物上点P的三维坐标,公式为
根据建筑立面目标物上点P 的三维坐标,得出建筑立面三维激光的反射强度,结合CCD 相机,获取被测建筑立面的RGB 信息。三维激光扫描系统根据测距原理不同,其采用的三维激光扫描技术也存在较大差异[4]。本文在综合考虑建筑立面测绘需求与测绘特征后,选择应用范围较广泛、适用性较强的激光三角测距法。该方法主要利用三角形几何关系,求解被测建筑立面与激光发射装置之间的距离。三维激光扫描系统的激光三角测距法原理如图2 所示。
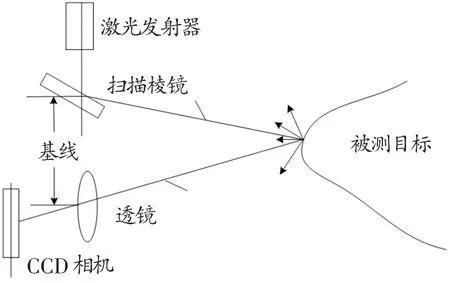
图2 激光三角测距法原理图
利用图2 所示的激光三角测距法,获取被测绘建筑立面扫描对象的全部信息数据。通过激光发射器,得到发射激光的入射光角度与回波信号之间的反射光角度,进而获取建筑立面局部观测数据与三维空间信息[5]。此种测距法扫描距离较长,测距范围广泛,更加适用于建筑测绘工程项目。
2 建筑点云数据采集与预处理
完成上述设计后,接下来进行建筑点云数据采集与预处理,为后续立面测绘提供数据支撑。传统的测绘方法在建筑立面外业数据采集中,受到建筑工程所在区域地形、测绘设站位置以及立面目标物体等各项因素的影响,其点云数据精度较低[6]。在综合考虑传统建筑立面外业数据采集方法存在的缺陷后,本文采用将三维激光扫描与二维激光雷达扫描相结合的方法,进行点云数据采集。雷达能够实时反馈建筑点云数据对应的点深与角度,三维激光扫描系统根据点深与角度,有针对性地采集点云数据信息,可移植性较强。通过旋转云台位置,全面覆盖建筑工程所在区域,使采集的建筑点云数据覆盖全面。本文设计的建筑立面外业点云数据采集流程如图3 所示。
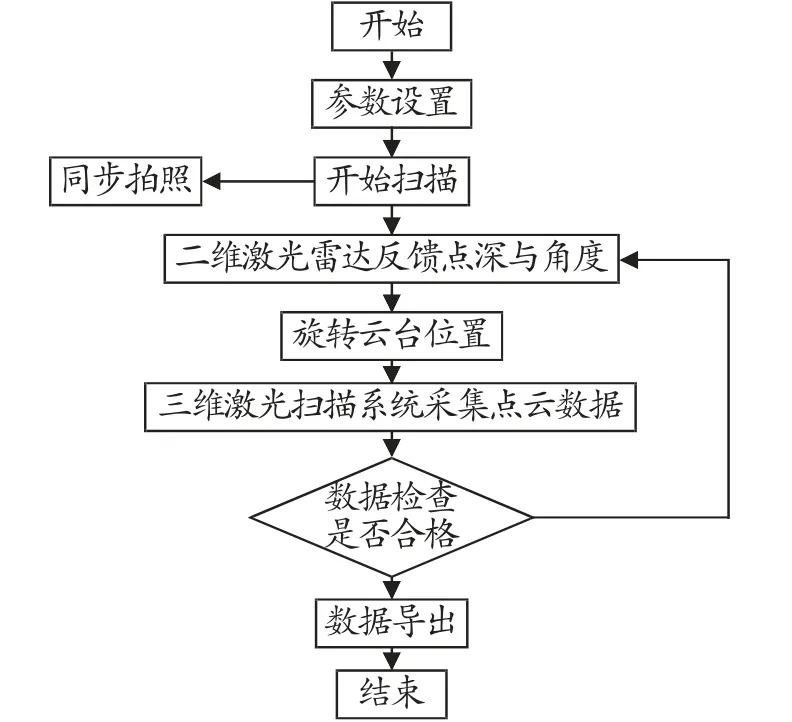
图3 建筑立面外业点云数据采集流程
首先,测制建筑立面图纸,建立建筑立面三维实景模型,确定点云数据采集的技术路线;然后,根据技术路线,在合适的数据采集位置布设测站,架设全站仪;最后,基于二维激光雷达的建筑点深与角度反馈作用,获取建筑点云数据的动态变化,不断旋转云台位置。使用上述设计的三维激光扫描系统,全方位采集建筑立面外业点云数据[7]。将采集到的建筑立面每站点云数据配准到上述构建的建筑立面空间点三维几何空间坐标系中,进行数据配准操作。根据配准结果,粘贴建筑立面测绘标靶纸[8]。在标靶纸粘贴前,对靶标球心位置、半径与离散点之间的关系作出分析,设定靶标球心三维空间坐标为,靶标扫描点三维坐标为,其关系表达式为
式中:r 表示标靶半径。对标靶纸粘贴参数计算结果进行拟合处理,减小误差。利用HD Scene 点云处理软件,加载建筑立面点云数据,基于标记特征点功能,分别求取靶标的三维水平角与三维竖直角,公式为
式中:φ、α 分别表示靶标的三维水平角与三维竖直角。在此基础上,粘贴标靶纸。标靶纸粘贴位置的精确度直接影响了建筑立面内业数据质量,采用高低远近错落的粘贴方式,将其牢固粘贴在立面上,避免后续测绘作业中标靶纸发生滑动脱落。另外,设置三维激光扫描参数,包括激光点频率、点云数据激光扫描范围以及扫描分辨率。在此基础上,对建筑立面点云数据进行预处理,包括点云着色、配准、降噪、分割、精简、漏洞修补、纹理映射等预处理方法,其中,以点云数据配准为主。将采集到的站点点云数据统一到坐标系中,找出相邻测站中点云数据存在的对应关系,通过平移旋转的位置变换方式,使点云数据坐标位置完全重合。通过三维激光扫描系统的自动识别功能,命名相同点云位置的元素,求出同名点云数据坐标位置变换关系,拼接点云数据,全面提高建筑立面点云数据的质量。
3 基于点云数据提取建筑立面特征
获取建筑立面点云数据后,利用点云数据提取建筑立面特征,达到建筑立面高精度测绘的目的。将上述预处理完毕的建筑立面点云数据导入CAD软件中,将三维激光点云视图方向设定为建筑立面正射投影方向。结合建筑立面测绘图纸,描绘点云立面图,基于横平竖直的连线方式,在点云立面图上连接各个测绘要素,使用辅助线,提高点云立面图各线条的整体性,规避建筑立面点云边缘不规则干扰的问题。
选取能够准确描述建筑立面目标物体特征的点云数据中点,将其设置为建筑立面测绘细节特征点。连接能够描述建筑立面轮廓的特征点,形成立面细节特征线,反映建筑立面测绘目标形状与轮廓。基于三维激光点云模型的平面投影功能,将点云分割出建筑立面,导入上述平面点云数据至AutoCAD 中,基于点云数据提取建筑立面特征。
在建筑立面中,大多数细节结构均属于对称布局结构。利用CAD 软件,勾绘立面测绘标准图件,将其复制到其他对称布局位置,既能够减少测绘误差,又能够有效地缩短测绘时间,提高测绘效率。在此基础上,利用三维激光扫描技术中的相位法,进行建筑立面测距作业。首先,基于三维激光无线电波段频率,不断调制激光束幅度;然后,测定三维调制激光信号在建筑立面被测距离上来回传播所产生的相位差,测定来回时间;最后,计算建筑立面被测距离,公式为
式中:H 表示建筑立面被测距离;Δφ 表示三维调制激光信号来回传播产生的相位差;f 表示三维激光脉冲频率。通过计算,得出被测建筑立面的距离,实现建筑工程中立面测绘高精度的目标。
4 对比分析
为了检验上述测绘方法在工程建设中的有效性与可行性,选取某地区R 老旧小区改造建筑立面测绘工程项目作为此次研究依托,进行了如下文所示的应用对比分析,确认其可行性后方可投入使用。
R 老旧小区改造建筑立面测绘工程项目中,建筑楼体陈旧,楼间距较小,建筑楼群较为密集,建筑立面附属物分布复杂。在建筑立面测绘中,需要分别从东南西北4 个方向,进行多维度测绘。此次研究中,采用FARO 350 三维激光扫描仪进行测绘数据采集,扫描仪性能参数设置如表1 所示。
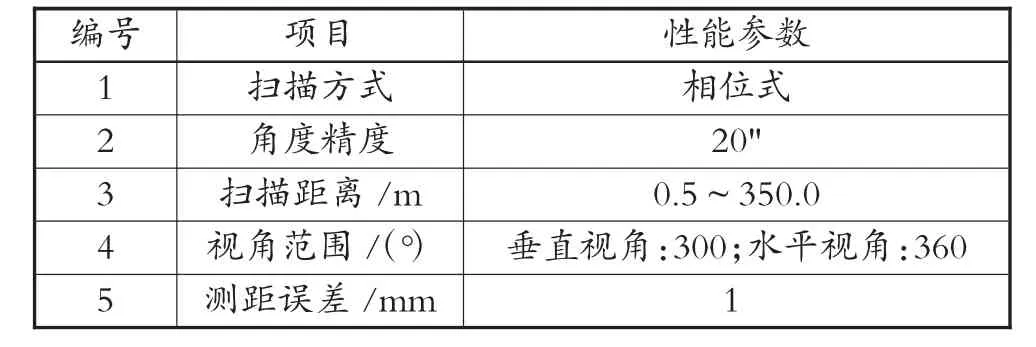
表1 三维激光扫描仪性能参数设置
此次应用分析中,选取三维激光扫描仪的性能参数,严格按照该参数进行设置。固定点位,架设三维激光扫描仪,并对其进行对重整平处理,结合徕卡全站仪作用,重复测量建筑立面目标物,扫描靶球,不断调节扫描水平与垂直角度。三维激光扫描系统的软件均采用FARO Scene 软件,对R 老旧小区改造建筑立面测绘点云数据进行配准与拼接处理。按照上述本文设计的测绘流程,对R 老旧小区建筑立面进行全面测绘。在R 老旧小区建筑立面上随机布设6 组测绘点位,标号为01—06,控制各组点位之间的距离在20 m 及以上,点位01—06 的扫描距离逐渐变长。选取建筑立面测绘点位的测距误差作为此次对比分析的评价指标。分别利用上述本文提出的测绘方法与传统的测绘方法,获取各组点位的三维测距误差,并对比,绘制如图4 所示的测绘点位三维测距误差对比图。
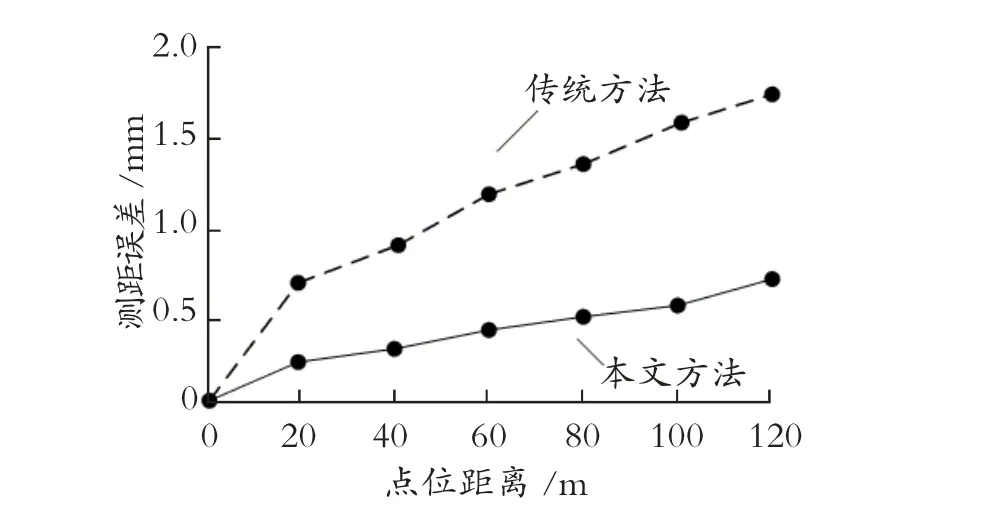
图4 建筑测绘点位三维测距误差对比
根据图4 的测距误差对比结果可以看出,在建筑立面测绘点位扫描距离逐渐变长的情况下,本文设计的建筑立面测绘方法在各组建筑立面测绘点位三维测距中,测距误差明显小于传统方法,均不超过1.0 mm;而传统方法的测距误差较大,且随着点位扫描距离增加,其测距误差也随之变大。由此不难看出,本文提出的基于三维激光扫描技术的测绘方法具有更高的可行性,测距误差较小,测绘结果精度较高,满足相应的老旧小区改造建筑立面测绘工程的精度要求,具有良好的测绘应用效果。
5 结论
建筑立面测绘能够为老旧小区修缮改造提供有力的数据支持,在建筑行业领域发展中起到了重要作用。通过图4 的对比结果可知,本文提出的建筑立面测绘方法误差较小,建筑测绘点位三维测距误差均不超过1.0 mm,测绘结果精度较高,符合建筑立面测绘精度的超高要求,有效地改善了传统建筑立面测绘方法精度较低、测绘点位测距误差较大的不足。
猜你喜欢
装备制造技术(2021年4期)2021-08-05
制造技术与机床(2018年12期)2018-12-23
测绘工程(2018年3期)2018-03-20
测绘科学与工程(2016年4期)2016-04-17
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13
河南城建学院学报(2014年2期)2014-02-09
现代营销·经营版(2013年5期)2013-05-14