
基于专利分析的车路协同技术研究
2023-11-08 07:13:22郭宇宏王亚飞郭少杰
汽车文摘 2023年11期
郭宇宏 王亚飞 郭少杰
(中国汽车技术研究中心有限公司,天津 300300)
0 引言
车路协同技术是自动驾驶技术重要的研究方向和新兴产业技术群体。基于无线通信、传感探测技术获取车路信息,通过车与车、车与路信息交互,实现车辆和路端基础设施之间的智能协同与配合,达到优化利用系统资源、提高车辆行驶安全和道路交通安全的目标。基于车路协同技术,能够动态采集并融合交通信息,开展车辆主动安全控制和道路管理,实现人、车、路有效协同。
目前,车路协同技术已广泛应用于自动驾驶、交通控制等领域[1],且随着车端设备、路端设备的更新换代,车路系统信息获取能力仍在不断增强,如何更有效地利用这些信息,已成为自动驾驶和交通控制领域的研究热点。
卢春房等[2]指出:车路协同系统以“聪明的车”和“智能的路”为核心要素,以两者高效协同为基础,支撑起了覆盖面广、产业链条长、跨界融合突出的发展特点。而中国由于多样的土地与道路设施、门类齐全的制造业、市场潜力巨大等优势条件,在车路协同技术与产业发展上取得了不错的成果。文韬等[3]从系统架构角度,将车路协同系统划分为设备层、网络层、数据层、平台层和应用层等多个维度,并针对当前城市道路最为常见的路口场景、连续路段、隧道场景和匝道场景,给出相应的车路协同解决方案。熊文华等[4]通过对自动驾驶车辆功能局限性进行分析,找出自动驾驶车辆对路侧交通设施的潜在需求,从功能角度将路侧交通设施分为常规交通管理设施、交通协同设施、基站及网络设施、高精度定位设施及路内服务设施等,构建了车路协同路侧交通设施体系。在此基础上,从路侧设施配套分级设置的角度,提出四级自动驾驶道路分级标准,以及配套路侧设施设置要求,细化完善当前自动驾驶“路端”管理方面的技术要求,为管理部门提供参考。Yang 等[5]从边缘计算能力出发,分析了车路协同系统的组成以及影响边缘计算的主要因素,并结合智能公路示范项目提出了基于边缘计算的车路协同基础设施方案,对中国智能公路车路协同系统的设计、研发和工程实施具有重要的指导意义。
为了研究车路协同技术的发展趋势,本文采用专利分析模式,通过检索车路协同技术相关的专利,深刻剖析专利背后的技术路线,从专利申请态势、专利申请人、技术手段和技术效果4 个方面进行宏观分析,从感知层面、通信层面和应用层面进行微观技术解读,最后基于分析结果对车路协同技术进行总结和展望。
1 车路协同技术专利分析
本文专利分析使用的专利检索数据库为中国汽车技术研究中心自主研发的全球汽车专利数据库,对车路协同技术相关专利进行检索,时间范围为2010年1月1日至2022年9月1日。
检索主要采用分类号和关键词相结合的方式,关键词主要包括:车路协同、车路一体化、智慧交通、Vehicle Infrastructure Integration、smartway 和e-safety;分类号主要包括:G08、H04、B60W。对检索到的初始专利文件进行去噪和标引,最终得到车路协同技术相关的专利。其中,国内专利达3 585件,国外专利为775 件。下面将基于本次检索的结果,从专利角度对车路协同技术的发展进行剖析和预测。
1.1 车路协同技术全球专利申请态势分析
车路协同技术相关专利申请量如图1 所示。图1表明,自2015 年以来,国内外车路协同技术年度专利申请量突破200 件,并呈现逐年大幅度上升的趋势,2020 年和2021 年专利申请量增幅最大。受专利申请18个月公开周期的影响,2021年专利申请量达到了峰值,接近1000 件。可以推断,2022 年乃至今后几年,仍是车路协同技术专利申请和布局的黄金时期,仍会有更先进的车路协同技术出现,且专利申请空间非常充足。
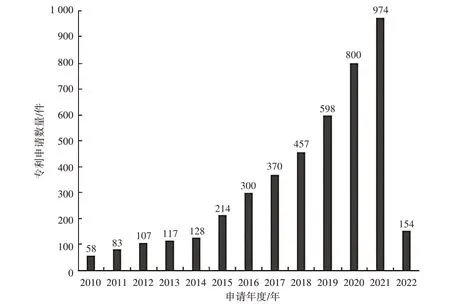
图1 车路协同技术年度专利申请量
1.2 车路协同技术专利申请人分析
从专利申请的全球分布情况来看,2010年以来申请的中国专利最多,中国申请人已成为车路协同技术创新的重要力量。下面分别就国内专利和国外专利的申请人情况进行分析。
车路协同技术国内专利申请人分布如图2 所示,排名前5位的申请人依次是北京百度网讯科技有限公司、阿波罗智联(北京)科技有限公司、腾讯科技(深圳)有限公司、东南大学和同济大学。其中,阿波罗智联(北京)科技有限公司为百度集团旗下致力于智能交通、车联网领域业务拓展的一家公司,足见百度集团在新一代信息技术与交通运输深度融合方面的技术贡献,并暂时掌握了专利申请与布局的主动权。此外,腾讯科技(深圳)有限公司作为科技实力雄厚的国内企业,在车路协同技术领域也拥有一定的专利申请量。东南大学、同济大学、清华大学等国内高校,也是技术创新与专利申请的主力。

图2 车路协同技术国内专利申请人
车路协同技术国外专利的申请人分布如图3 所示,排名前5 位的申请人依次是Apollo Intelligent Connectivity (Beijing) Technology Co., Ltd.、BEIJING BAIDU NETCOM SCI & TECH CO LTD、BLACKBERRY LTD、GUANGDONG OPPO MOBILE TELECOMMUNICATIONS CORP LTD 和INTEL CORP。以阿波罗智联(北京)科技有限公司和北京百度网讯科技有限公司为代表的百度集团不仅在国内申请了相当数量的专利,同时也开展了有针对性的海外专利布局,国外专利的申请量也名列前茅,为我国其他公司的技术发展和专利布局战略提供了示范。
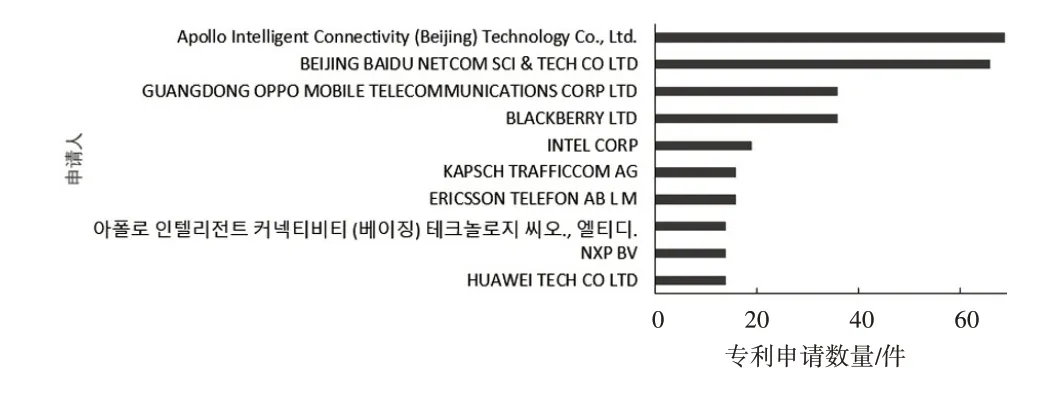
图3 车路协同技术国外专利申请人
1.3 车路协同技术专利技术手段分析
深入到技术层面,车路协同技术专利所采用的主要技术手段如图4 所示。结果显示,主要的技术手段分别为电控、设计分析方法、算法和软件,而结构、工装等方面的专利申请量较少。这是由于算法类技术手段可改进的灵活性强,创新空间比较大。而硬件设备改进可能涉及底层技术和生产领域大幅度变革,突破难度较大。因此,控制类、算法类技术手段创新仍是今后申请专利的主要方向。而结构、工装等硬件类的专利申请量较少,企业如有相关技术创新,应尽早占领先机,填补专利空白点。

图4 车路协同技术专利技术手段
1.4 车路协同技术专利技术效果分析
从技术效果方面分析,车路协同技术专利所实现的主要技术效果如图5 所示。申请量较大的技术效果分别为高效率、可靠性、精确性和安全性,这与我国利用车路协同技术改善道路安全与提高交通效率,兼顾节能与环保的目的非常吻合[6]。此外,也有相当一部分专利从降低成本和实时性的角度,挖掘出了车路协同技术的有益效果,这也印证了车路协同将大幅降低自动驾驶成本的观点。同时,环保与舒适性技术效果的尚属于专利空白点,仍有广阔的布局空间。

图5 车路协同技术专利技术效果
2 车路协同技术相关专利解读
从车路协同系统架构出发,将车路协同技术的相关专利划分为感知层面、通信层面和应用层面3 个技术分支[7],并对各技术分支的专利申请量进行了统计,结果如表1 所示。结果显示,应用层面的专利申请量最大,占比达50%以上,可见车路协同技术在具体技术场景中应用取得了创新成果,进一步证明了该项技术的实用价值。申请量排在第2 位的技术分支为感知层面,而通信层面的专利申请量相对较少,具有很大的研发和布局潜力。依托于对技术方案的深度剖析,概括出了3 个层面的技术分解,并给出了技术分支,如图6 所示,其中的数字代表技术分支下的专利数量。

表1 车路协同技术分支申请量

图6 车路协同技术专利技术分解
2.1 感知层面
车路协同的感知层技术能够实现车路协同感知,扩展感知维度,丰富感知信息。通过筛选代表性专利,提取出感知层面的3 个典型分支,即路端感知、感知算法和融合感知,充分体现车路协同感知与传统感知技术的区别。
2.1.1 路端感知
路端感知是利用路端设备对道路信息和车辆信息进行全面感知。路端设备分布广、状态稳定,在信息感知方面具有很多优势,能够为车辆智能驾驶或车路协同控制提供更丰富的实现途径。围绕充分发挥路段感知优势的主题,该分支包括了路端优势、路端精度和路端运维3个方面。
其中,体现路端优势的专利数量最多,涉及自动驾驶、安全控制以及节约成本方面,代表性专利有CN114394090A11、CN114999199A 和CN113264039A。其中,专利CN114394090A 公开了1 种车路协同虚拟前障碍物感应系统,对道路信息进行全面感知,获取车载系统位置,从而与高精度地图匹配,判断车载系统状态,并根据道路信息以及车载系统状态,在车载系统前产生虚拟前障碍物。该专利可以有效减少传感器在车上的应用,相当于把车上的传感器转移到路上,直接获取感知结果,从而实现更高级别自动驾驶功能,减少了算力和传感器数量,大大降低了成本。专利CN114999199A 提供了1 种信号灯数据的处理方法,通过路端设备判断车辆是否在路端信号灯控制机控制范围,以及目标车辆是否在预设消隐区中。若目标车辆在预设消隐区中,则控制目标车辆不对信号灯数据进行响应,避免了车辆在行驶过程中对错误的信号灯数据进行响应,降低了交通违规或交通事故发生概率,提高车辆驾驶安全性。专利CN113264039A 提供了1 种车辆驾驶辅助方法,从感知装置获取与车辆所在环境有关的感知信息,来估计车辆与环境中其他物体的碰撞风险。该专利利用环境中的路侧设备,以相对低的成本为车辆提供准确的碰撞风险预测。
鉴于路端感知的天然优势,很多专利致力于提高路段感知精度,以保证路端感知信息准确性,代表性专利有CN114596706A、CN114353853A和CN113763738A。其中,专利CN114596706A提供1种路侧感知系统检测方法,能够对车端感知系统输出的感知数据进行筛选,将其中可信度较高的数据作为真值数据,提高真值数据的准确性,从而提高路侧感知系统检测结果的准确性。专利CN114353853A 提供了1 种用于确定路侧感知系统的检测精度方法,基于测试车辆在运行时记录的数据列表和路侧感知系统检测测试车辆得到的数据列表,可以确定路侧感知系统的检测精度,提高了所确定的检测精度准确性。
此外,路端运维也是保证路端信息可靠性的重要手段,代表性专利有CN113689693A、CN114501179A和CN112866328A。其中,专利CN113689693A提供了1 种路侧设备异常处理方法,包括监控路侧设备的异常状态处理。专利CN113689693A基于异常状态生成报警信息,报警信息包括异常状态的类别信息。将报警信息通知给用户,使用户基于类别信息对应处理报警信息。
2.1.2 感知算法
感知算法是利用车路协同技术实现协同感知的具体方法。由于感知目标的多样性,大量专利针对不同目标的具体形态、属性,提出了适配性更强的感知算法(如交通灯感知、车道线感知、障碍物感知和人流量感知),覆盖了交通领域中最关键的目标对象。
交通灯作为交通领域最重要的信号来源,交通灯感知算法相关的专利数量是最多的,代表性专利有CN114399917A、CN114494945A 和CN113602216A。其中,专利CN114399917A 公开了1 种交通信号灯识别方法,通过交通信号灯图片、JPEG 图像字段以及微控制单元(Micro Controuer Unit,MCU)系数矩阵转换和应用,减少在感知过程中的计算量。CN114494945A提供了1种交通灯图像采样方法,通过对单种灯色切换时间区间以及灯色稳定时间区间进行分析,实现了对采样视频的均衡采样,有助于提升采样质量,从而提升模型对交通灯灯色的识别效果。
车道线也是车路协同领域的重要信息标志,车道线识别的代表性专利有CN114323033A、CN113392793A、CN113705305A和CN114898325A。其中,CN114323033A 提供了1 种用于识别车道线的方法,将待识别图像输入至预先训练的车道线识别模型,得到车道线识别结果。车道线识别模型包括通过无监督训练得到的特征提取模型和通过有监督训练得到的分割模型,特征提取模型用于提取待识别图像特征,分割模型用于根据待识别图像特征进行实例分割以识别车道线。该专利实现了基于自监督学习和实例分割的车道线识别。
障碍物识别是交通感知领域的研究热点,路端障碍物识别的代表性专利有CN114359495A、CN114882717A和CN114559933A。其中,专利CN114359495A提供了1 种三维障碍物数据增强方法,在同一背景中获取至少1 个三维障碍物及其对应的标签,并从中选取待贴图的三维障碍物,贴图至目标图像的指定位置,并标注待贴图三维障碍物的标签。该专利可以保证目标图像中原有的三维障碍物与贴图的三维障碍物的成像几何关系不被破坏,提高感知准确性。
人流量感知的专利虽然数量较少,但也是车路协同感知的新兴领域,代表性专利有CN114329238A、CN114582117A和CN112819835A。其中,CN1143292 38A 提供了1 种数据处理方法,获取目标对象使用智能终端产生的时空数据。若目标对象位于目标区域,基于时空数据,统计目标对象在目标区域内的数量,确定目标对象的时空分布信息。当目标对象为行人时,即可感知人流量的准确信息。
2.1.3 融合感知
融合感知是将车路系统感知到的信息进行融合,提升感知质量或感知体验。根据融合方式的不同,概括出不同传感器信息融合、同类感知信息融合,以及融合展示3个方面。
丰富的传感器配置是车路协同系统的重要特征,将不同类型传感器获取到的感知信息进行融合,能够大幅度提高感知信息质量。不同传感器信息融合方面的专利非常多,包括视觉传感器与雷达传感器信息融合(CN113687383A、CN113687384A、CN113688900A、CN113341429A),以及特定道路场景下的传感器信息融合(CN114912685A、CN114862901A)。其中,专利CN113688900A 提供了1 种雷达和视觉数据融合处理方法,从雷达传感器和视觉传感器分别接收点云数据和图像数据,基于对应关系对激光点的反射强度信息和像素点的亮度信息进行融合处理,得到亮度融合信息,实现画质增强,减少了图像数据噪点,并且提高了信噪比。专利CN114912685A 提供了1 种基于车路协同的行驶路线调整方法,适用于太阳能公路特殊路段场景,通过获取太阳能公路上设置的重力传感器传回的重力感知数据,对预先规划的目标路线进行调整,可在保障驾驶安全的同时提升行驶效率。
除不同类型的传感器信息相互融合之外,同一类型的感知信息也可以进行融合处理,代表性专利有CN114880337A、CN114328785A。专利CN114880337A提供了1 种地图数据一体化更新方法,基于地图要素置信度统一更新不同精度地图,在保障数据一致性的同时,实现了地图要素信息与地图信息融合。CN114328785A 提供了1 种提取道路信息的方法,对车辆行驶轨迹集合进行预处理,过滤掉满足预定条件的轨迹。通过统计轨迹之间相似距离,计算目标轨迹集合关联度。从目标轨迹集合中提取道路信息,通过轨迹信息融合,快速、准确地根据车辆行驶的轨迹提取道路信息,降低了构造地图的成本。
融合展示更侧重于用户体验,也是融合感知的重要组成部分,代表性专利有CN114333314A、CN114328783A 和 CN114228735A。 其中,专利CN114333314A 公开了1 种车路协同信息处理方法,由电子设备接收待测车辆的路端感知信息和待测车辆路线信息,并生成待测车辆的可视化场景。同时,将动态的车端信息和交通控制信息在可视化场景中呈现。这一方式可以实时展示待测车辆的周围景象,丰富待测车辆感知数据,为交通参与者带来直观感受,提高交通参与者参与交通的安全性。在一些场景下,需要展示电子地图中的对象数据,专利CN114228735 提出了1 种地图数据输出方法,通过待展示区域标识,确定相关联的融合对象数据,实现区域地图与相关数据融合展示,提高了展示效果和效率。
2.2 通信层面
在通信层面,车路协同技术涉及到多端设备、多级别信息,对通信网络、通信协议进行适配性改造,才能实现不同设备信息交互。对具体技术手段进行归类总结,选取通信层面的3个典型分支,即车联网(Vehicle to Everything,V2X)通信、协议融合和通信网络进行总结。
2.2.1 车联网通信
V2X 协议是车端通信的重要协议,基于V2X 通信协议和V2X 设备进行车路通信,也是车路协同技术最常用的技术手段。 V2X 通信代表性专利有CN114363813A、 CN114928823A、 CN114866620A、CN114758519A、CN114579657A和CN112154677A等。
专利CN114363813A 公开了1 种基于广播的V2X通信终端,通过携带移动源,并与基站通信,实时获取移动源的位置信息、移动方向和移动速度信息,同时获取基站的位置信息,并将基站位置信息以及移动源位置信息、移动方向和移动速度信息传输进行融合处理,得出移动源的精准位置信息、移动方向和移动速度信息。该专利中,移动源端和基站通过V2X 通信,不用选择配置太高的硬件载体,进而降低整个车路协同系统硬件成本,提升车路协同系统运行效率。
专利CN114928823A 公开了1 种基于LTE-V2X技术的模组直连通信的解决方法,通过V2X 模组、云服务器、感知模组、车载单元(On Board Unit,OBU)模组和路侧单位(Road Side Unit,RSU)模组相互配合,使车与车、车与路侧设备之间通信连接采用模块作为处理器的网络架构,可提供软件开发工具包(Software Development Kit,SDK) 和语音合成技术(Text To Speech,TTS)协议,支持二次开发,可灵活支持各类应用模式,可满足驾驶辅助、自动驾驶、车路协同和智慧交通各类应用对C-V2X 设备软硬件开发需求。通过匹配电源管理模块、基带模块、存储模块、射频模块和FEM 5GHz C-V2X 前端模块,可支持客户基于内置应用处理平台开发和移植C-V2X 协议栈和安全应用软件。通过匹配V2X 模组、OBU 模组和RSU 模组,可支持C-V2X PC5 直连通信,支持V2X 安全应用场景,可部署于OBU和RSU各类设备和应用场景。
专利CN114866620A 公开了1 种面向车路协同的路侧设备数据与协议转换器,包括消息管理器、消息路由器和应用插件。其中,应用插件包括基础插件、第3 方数据处理类插件和第3 方应用服务类插件。消息管理器通过应用插件获取数据种类不同的原始数据,并将其转换为V2X 标准消息,再通过消息路由器,对数据消息进行收发,从而将协议不统一、通信方式各异的设备进行车路协同集成。
2.2.2 协议融合
车路协同系统涉及多种设备,不同设备之间的通信协议存在差异。协议融合是指在不同的通信协议之间进行融合,保证通信顺畅。相关专利申请主要包括协议封装、协议转换和协议测试。
协议封装是指基于可用通信协议进行数据封装,实现车路协同场景下的数据通信,拓展其他类型的协议在车路协同场景中的应用,代表性专利有CN114363841A、CN114363643A 和CN114124909A。其中,专利CN114363841A 公开了1 种车路协同混合模式通信系统及方法,具体内容如下。
(1)校验来自车端和/或路端的业务场景数据后生成业务消息帧,分发至车端和/或路端应用处理程序。
(2)解析消息帧后生成消息集,对消息集进行二进制编码,得到二进制数据流重构为消息帧。
(3)对二进制数据流按照业务场景对应的传输协议进行编码,根据传输协议进行解码。
该专利实现跨通信终端、跨通信制式、跨业务类型和跨系统平台通信,融合了系统运行监测管理,提供了更加高效、稳定的通信。
协议转换是指将不同设施、不同车辆、不同智能级别的协议和信息互相转换,实现车路协同通信,代表性专利有CN114363862A 和CN112702660A、CN113691588A。其中,专利CN114363862A 公开了1种服务于车路协同自动驾驶的智能信息转换系统和方法,用于连接并提供智能路侧设施系统和智能网联车辆之间的实时动态信息交互。根据码本将实时动态信息编码整理成码本字符串,再还原解析,实现车端基本信息、车端感知信息和车辆控制信息,以及道路感知信息、车辆感知信息和交通控制信息通信。该专利促进了智能道路基础设施(Intelligent Road Infrastructure Subsystem,IRIS)和智能网联车辆(Connected and Automated Vehicle, CAV)之间的一系列智能级别(例如V1、V1.5、V2、V3 和V4)通信,提高了自动驾驶系统服务水平,并提供功能和支持,以满足包括CAV和IRIS系统要求。
协议测试作为协议通信的重要环节,在应用到车路协同领域时也做出了一定改进,代表性专利有CN112527678A、CN112988535A 和CN110177374A。其中,专利CN112527678A公开了1种用于测试协议的方法,具体内容如下。
(1)基于车机端与安装有目标协议测试包的移动端之间目标协议,得到协议传输测试数据流。
(2)基于该数据流和目标协议时序图,定位协议传输测试数据流中的异常数据和位置。
该专利通过自动判断协议时序,可以有效验证目标协议的正确性,保证目标协议不会出现连接问题,可提升用户体验,大幅简化测试验证流程,减少开发方和验收方的资源消耗,提高对目标协议开发、测试、验收各环节效率。
2.2.3 通信网络
良好的通信网络是车路系统正常运作的保障。相关的专利申请主要包括网络接入、网络架构和网络监控。
随着科技的不断发展,越来越多的设备接入车路协同网络,作为建立网络通信的首要环节,网络接入方式成为通信层面的热点话题,包括网络寻址、网络访问等多个过程。网络接入的代表性专利有CN114338415A、CN112714420A 和CN114500222A。其中,专利CN114338415A 提供了1 种端口扫描方法,用于解决在智能交通领域进行端口扫描时,扫描结果的准确性及可靠性较低的问题。当扫描失败时,基于失败原因对相应的初始扫描任务进行任务更新,重新对初始扫描任务进行端口扫描,以获得扫描成功结果,提高了扫描结果的准确性及可靠性,从而保证顺利接入车路协同网络。专利CN112714420A 公开了1 种是无线保真(Wireless Fidelity, WiFi)热点提供设备的网络访问方法,应用于智能交通领域的WiFi热点提供设备。当该设备检测到连接设备时,基于连接设备的互联网协议地址访问网络,通过软件实现了WiFi热点提供设备对网络的访问,且整个实现过程中,无需对WiFi热点提供方的硬件进行升级,从而降低了操作难度。
随着未来车联网的高速发展,车路数据爆炸式增长,网络架构决定了组网方式和通信手段,也是保证车路协同通信高质量、低延时的前提。网络架构方面的代表性专利有CN111083671A 、CN113038418A 和CN114915940A。其中,专利CN111083671A 提出了1种基于确定性网络架构的车路云协同组网架构及方法,架构包括融合端设备、融合边缘设备和融合云设备。融合端设备、融合边缘设备和融合云设备均基于车路云系统的业务需求对网络资源和计算资源进行协同配置,以确定车路终端与融合云设备之间的通信链路。该专利利用确定性网络解决车联网对移动性和实时性需求较高的问题,实现路况传感信息、车辆传感信息的车路网云协同融合计算。确定性网络架构主要针对车路协同端、边缘和云的高速、低时延需求,支持驾驶决策驱动的智能计算和高速通信能力,满足低时延、高可靠、大带宽、高速移动、高速计算、大容量存储和海量连接车路协同对网络提出的新需求。
随着互联网的全面推进,未来网络安全防御体系将更加看重网络安全监测和响应能力。网络监控方面的代表性专利有CN112769595A、CN112333669A 和CN114124548A。其中,专利CN112769595A 公开了1种异常检测方法,应用于自动驾驶、智能交通场景,通过终端进程文件系统,获取并解析网络连接相关文件,得到终端网络连接信息,对终端进行异常检测。该专利可以减少对终端系统性能的消耗,避免影响终端系统性能。专利CN112333669A 提供1 种车路协同路侧基站系统的安全检查方法,根据安全配置信息对所述车路协同路侧基站系统的节点和组件进行安全漏洞扫描,生成安全漏洞报告。对所述车路协同路侧基站系统的预定组件进行安全配置基线核查,生成安全风险评估报告,进行问题定位和/或预警提示。该专利能够保证车路协同路侧基站系统的正常运营。
2.3 应用层面
在应用层面,无论对车端还是路端,基础设施和车路信息融合都带来了极大的创新性变革。根据应用整体的不同,选取了车端应用、路端应用和综合应用进行归纳总结。
2.3.1 车端应用
车辆作为交通领域中数量最为庞大、灵活性最强的参与者,是车路协同技术最主要的应用主体。车路协同技术打破了局限于车辆自身的技术壁垒,通过信息一体化,使车端应用实现了质的飞跃。在这一分支下,围绕最常见的车端应用,分析了路径规划、智能驾驶和融合定位典型应用场景。
车端路径规划是指根据车路系统环境进行车辆路径规划和引导,提高路径科学性,代表性专利有CN114387781A、CN114358408A、CN114312786A 和CN114323060A。其中,专利CN114387781A 公开了1种车辆引导控制方法,通过横向交通流和可变限速引导引入的元胞传输模型,获得各元胞间交通流单步传播的预测模型。通过车辆引导优化模型,获得控制变量。将控制变量输入预测模型中,获取预测输出,将预测输出输入车辆引导优化模型,实现在线车路协同环境下高速公路瓶颈车辆引导策略。 专利CN114358408A 基于公交车场景提供了1 种线路生成方法,获取目标终端所处的当前公交站点的站点信息。在当前公交站点到目标公交站点之间的线路上发生拥堵的情况下,检查当前公交站点距离下一换乘站点之间的站点数是否小于预定站点数,生成包括步行至下一换乘站点,以及下一换乘站点到目标公交站点之间的线路。通过上述躲避拥堵路线推荐方法,可以解决交通拥堵场景下,普通公交线路的时间大幅增加问题,满足用户出行要求。
车端智能驾驶是指通过车路协同技术获取信息,更好地制定和实施车辆智能驾驶策略和控制策略,代表性专利有 CN114212108A、CN114299755A 和CN114312839A。其中,专利CN114212108A 公开了1种自动驾驶方法,适用于单车智能驾驶场景,可以由电子设备执行。该设备响应于获取位于主车前方的第一交通灯控制信号,确定由第一交通灯控制的车道。该设备响应于基于规划行驶轨迹确定主车位于车道上,根据车身朝向与车道延伸方向之间的夹角,确定是否基于控制信号确定主车的行驶策略。专利CN114299755A 公开了1 种智能网联队列换道方法,适用于车队的智能驾驶场景,通过目标车道车辆动态间隙和队列换道所需间隙,来判断是否属于强制换道。若满足间隙需求,则目标车道车辆协助实现队列协同换道。若不满足间隙需求,则等待下1个间隙,队列内车辆依次换道。本专利可有效实现队列整体换道,为智能网联队列安全、稳定地换道提供支撑。专利CN114312839A 提供了1 种信息处理方法,可以由电子设备执行。该设备响应于接收到用于表征自动驾驶车辆由自动驾驶模式切换为人工驾驶模式的指示信号,生成多个人工接管类型信息。该设备响应于接收到选择多个人工接管类型信息中的目标人工接管类型信息的操作,确定切换类型为目标人工接管类型,输出目标人工接管类型以及目标信息,目标信息与自动驾驶车辆由自动驾驶模式切换为人工驾驶模式。
车端融合定位是指利用车路协同技术进行车辆定位,提升定位结果性能,代表性专利有CN11427945 3A、CN114877883A、CN114779304A。其中,专利CN1 14279453A 公开了1 种基于车路协同的自动驾驶车辆定位方法,根据车辆参考位置信息集合确定自车参考位置信息,确定自车绝对位置信息,并进行融合定位,得到自车融合定位结果。该专利通过路侧设备端可视范围内所有车辆的位置信息确定出自车位置,再通过融合定位处理得到自车最终的融合定位结果,保证了极端环境或者极端天气下的定位精度与稳定性。专利CN114877883A 提供1 种车路协同环境下考虑通信延迟的车辆定位方法,直接将滞后的路侧端测量信息和车载端实时数据进行融合,以消除高度不稳定的通信延迟对车辆定位的影响,通过因子图实现异步数据融合,避免引入数据拟合误差。具体实现过程包括:利用车载激光雷达(Light Detection and Ranging,LiDAR)和全球导航卫星系统实时动态测量(Global Navigation Satellite System Real-time Kinematic,GNSSRTK)构建路侧周围环境点云地图。将路侧LiDAR点云与点云地图进行配准,基于预建点云地图结合背景差分滤波提取动态目标点云。通过具有噪声的基于密度的聚类方法(Density-Based Spatial Clustering of Applications with Noise,DBSCAN)对预处理后的目标点云进行聚类,将属于不同目标的点云聚合成单独的簇。选取目标特征,通过支持向量机完成分类任务,获得车辆目标,实现目标车辆在导航坐标系下的定位。基于因子图,通过增量平滑推理获得当前时刻车辆状态最优估计,支持在全球导航卫星系统(Global Navigation Satellite System, GNSS)信号失效下实时定位。
2.3.2 路端应用
随着路端通信设施和基础设施发展,路端应用也逐渐被带动起来,进一步打通了车路协同快速发展通道[8]。路端应用包括交通管控和道路评价方面[9]。
路端交通管控是指利用车路协同信息进行交通引导,提高管控效果,代表性专利有CN114399914A、CN114333352A和CN111127893A。其中,专利CN114399914A 公开了1 种车路协同的车道、信号灯和车辆联合调度方法,该方法可根据每个车辆的车辆状态信息和当前相位信息,预测当车辆到达路口停止线时行驶方向对应的信号灯相位状态信息,预测车流在对应行驶方向上最大排队长度,判断最大排队长度是否超过路段本身长度,指示车辆是否可继续行驶至直行待行区。该专利针对不同行驶方向交通流比例失衡的情况,基于车路协同技术的全息感知能力和通信能力,对交叉口不同行驶方向的流量进行估算,并估计最大排队长度,判断是否会产生过长的排队,进而发送消息至所有通信范围内车辆,提升交叉路口通行效率。专利CN114301938A 公开了1 种车辆事件确定方法,根据初始车辆事件包含的与目标车辆对应的初始事件信息,确定与初始事件信息相关的补充事件参数。从车载终端和/或路侧感知设备获取与补充事件参数对应的补充事件信息,确定与目标车辆对应的最终车辆事件。该方法借助云端服务器融合车端和路侧端各自视角记录的信息,从而根据更全面的信息更准确地确定车辆事件,避免因单一视角对某些关键信息遗漏确定出错误的车辆事件。
路端道路评价是指利用车路协同信息进行道路评价,指导路端建设以及车端道路选择,代表性专利有CN112489428A、CN114858214A 和CN113505980A。专利CN112489428A 公开了1 种基于驾驶行为的道路评价方法,在虚拟环境下对测试道路进行分析,实时采集虚拟车辆运行速度信息和驾驶员眼动信息,对每个分析单元路况进行分析,确定安全隐患路段。根据车辆运行速度,获得相邻分析单元速度差、车辆运行加速度、减速度和转向角速度,通过相邻分析单元速度差、车辆运行加速度、减速度和转向角速度对分析单元路况进行分析,实现了在道路设计初期阶段,对道路进行预先评价。CN114858214A 公开了1 种城市道路性能监测系统,依据各类数据特点将其分成表观类数据、高差类数据、抗滑性能评价数据和其他类数据,并依据特征分别选择了监测设备类型进行调研。将它们在性能、成本等多个角度做了横向对比,确定其中最适合本专利的设备型号。在此基础上,结合现有路侧监测设备分布情况,从监测设备的监测范围以及成本角度确定设计与试验方案,确定了不同监测设备布置间隔。
2.3.3 综合应用
除车端应用和路端应用外,还有一类基于车路协同技术而产生的综合应用。这类综合应用既可以应用在车端,也可以应用在路端使用,还可以应用于第3方,具有更强的适用性。这一类综合应用包括场景挖掘、环境监测和金融支付应用,其专利数量虽然不是很多,但也在一定程度上拓展了车路协同技术的应用范围。
场景挖掘是指挖掘典型交通应用场景,建立针对交通场景的自主式交通系统,是系统验证和改进的重要手段,代表性专利有CN114925114A、CN114817463A和CN114817463A。其中,专利CN114925114A提供了1 种场景数据挖掘方法,根据目标交通场景事件的事件信息,以及所关联的自动驾驶车辆行驶数据,确定目标交通场景事件对应的有效落盘时间。根据有效落盘时间,从自动驾驶车辆落盘数据中截取相应数据作为目标交通场景事件对应的真实场景数据。其中,有效落盘时间是指在目标交通场景事件发生阶段对自动驾驶车辆进行数据落盘的时间。该专利公开方案可提升交通场景数据挖掘效率。
目前,智慧交通领域中已逐渐出现越来越多的城市治理方面需求,其中环境监测方面的应用已成为相关技术中的1 个研究方向,代表性专利有CN114563377A、CN114973669A 和CN109727471A。其中,专利CN114563377A 提供1 种基于车路协同的环境监测方法,通过车载单元采集环境图像信息,通过车载单元与其他设备(V2X)通信协议,采集来自路侧单元图像信息。基于预先加载的高精地图数据,确定目标区域内特种车辆。采集区域内能见度参考值,在监测到能见度参考值满足预设条件时,通过V2X 通信协议向所述特种车辆发送指令,以调度所述特种车辆进行环境治理,例如进行道路清扫、洒水作业等,改善道路环境和空气环境。
随着车路协同系统的普及,设置在车辆上的车载单元与车外路侧单元之间的数据交互已经成为移动金融支付的重要基础设施。金融支付方面的代表性专利有CN114037526A、CN113807841A 和CN112712699A。其中,专利CN114037526A 公开了1 种数字货币支付方法和系统,可以由电子设备执行,该设备响应于外部支付指令,生成握手消息向包括收款方在内的CAN总线上的节点广播,根据所述握手消息与所述收款方建立通信连接,生成支付消息。该专利能够拓展车路协同系统组网方式和支付手段。
3 结束语
车路协同技术作为一项新技术,实现了通信、智能驾驶和交通管理的多领域融合,具有广阔的应用前景。车路协同技术专利申请量在2015 年以后出现大幅度上升,在2021 年达到了顶峰。从申请人方面分析,排在前5 位的申请人依次为北京百度网讯科技有限公司、阿波罗智联(北京)科技有限公司、腾讯科技(深圳)有限公司、东南大学和同济大学。从技术手段方面分析,排名前5位申请人的技术手段分别为电控、设计分析方法、算法、软件以及检测计测试。申请人可以在软件算法上继续创新,同时加强对硬件设备进行技术创新。
目前车路协同技术在感知层面、通信层面和应用层面都拥有一定比例的专利申请量,其中应用层面的申请量最大。从应用领域看,自动驾驶和交通控制为创新技术的主要孵化领域,且以提高两者的安全性、高效性、精确性为技术创新主要目标。环保和舒适方面也是我国建设车路协同系统的重要目标领域,尚属于专利空白点,具有广阔的布局空间。
在车路协同感知层面,现阶段专利多集中于多样化的感知算法和融和算法。为了实现对感知信息的充分利用,通常需要增加算法复杂度和处理流程,才能得到理想的感知结果。因此,提高硬件设备处理能力、优化计算量、提高实时性并减少运维难度,是未来技术创新需要关注的方向。
在车路协同通信层面,受基础设施兼容性和适配性限制,相关专利数量较少。加快交通运输领域通信标准建设,加强车路协同领域标准必要专利的研究,将是汽车领域、交通领域和通信领域待研究的热点课题。
对于车路协同应用场景方面,现阶段应用场景往往路况简单、路线相对固定、交通参与者较少,对于大范围不定线路场景、复杂交通环境场景和极端恶劣天气场景下的专利数量较少,可开展进一步研究与布局。
猜你喜欢
水运工程(2022年7期)2022-07-29 08:37:38
传感器世界(2019年4期)2019-06-26 09:58:44
汽车观察(2019年2期)2019-03-15 05:59:54
中国交通信息化(2018年12期)2018-03-21 05:52:32
河南科技(2016年8期)2016-09-03 08:08:22
发明与创新(2016年5期)2016-08-21 13:42:50
化学分析计量(2013年1期)2013-03-11 16:37:15
发明与创新(2013年1期)2013-03-11 15:53:28
世界制造技术与装备市场(2010年5期)2010-04-14 21:07:10
轴承(2010年2期)2010-04-04 09:23:11
