测量机器人与Android 通信控制及内外业协同研究
2023-11-06 11:07:58高建伟
地理空间信息 2023年10期
高建伟
(1.广州市城市规划勘测设计研究院,广东 广州 510060;2.广东省城市感知与监测预警企业重点实验室,广东 广州 510060)
随着国家机构改革和优化营商环境等政策要求,测绘市场的多元化需求越来越大,这就需要不断更新技术设备,优化作业方法,提升技术实力来应对机遇和挑战。常规测量作业为外业数据采集及草图绘制、内业数据计算及成图、外业核查等过程,需要多次进入测区,内业也需外业完成后进行,作业效率不高。此外,在超高层建筑、地铁、桥梁及滑坡体变形监测领域,大型设备安装等工程建造领域,对测量仪器远程控制、测量工作的自动化作业要求越来越高[1]。
测量机器人以其自动化、全天候等特点广泛应用于各种测绘项目,再与能够制订测量计划、控制测量过程、进行数据处理与分析的软件相结合,可以代替人完成许多测量任务[2]。Android 智能设备具有蓝牙、移动网络、GPS等传感器,Android程序具有很好的兼容性和实用性。二者结合,既能实现测量机器人与Android 远程通信控制,进行自动化测量作业,又能在此基础上,将获取的测量数据通过5G 等移动网络实时传输给内业设备进行计算及成图,成果同步传回外业Android 设备,实现内外业协同作业,极大的提高作业效率。
1 测量机器人与Android通信控制实现
1.1 测量机器人与Android通信控制原理
1)测量机器人控制的基本原理。GeoCOM是Leica测量机器人提供的数据接口,用来完成控制全站仪动作、获取数据等操作。GeoCOM 通过2 种模式进行通信:ASCⅡ模式和函数调控模式,函数调控模式仅适用于PC 平台,Android 平台上使用ASCⅡ模式进行通信。GeoCOM 的ASCⅡ模式控制过程由请求和应答构成。程序通过蓝牙(或串口线)发送一个请求指令到测量机器人,接收应答并对应答进行解码来实现仪器的控制及测量数据的获取[3-4]。
2)测量机器人与Android蓝牙通信原理。测量机器人自身具备或外接蓝牙适配器与Android 进行蓝牙无线通信,蓝牙适配器通过串行线性仿真协议将有线的串口连接转变为无线的蓝牙串口连接,从而取代传统的串口通信线缆,实现无线通信,并通过Android程序调用GeoCOM 接口发送ASCⅡ指令进而实现对测量机器人的控制。
1.2 测量机器人与Android通信控制实现
1)软硬件环境。开发的硬件环境采用具备蓝牙模块的leica TM30测量机器人和搭载Android系统并且具备蓝牙功能的设备。软件开发平台选择Android Studio,并采用Java作为开发语言。
2)关键技术。①Android 蓝牙通信技术:Android 软件通过蓝牙API 访问蓝牙功能,并与其他设备进行点对点、点对多点连接[5]。表1 说明了测量机器人与Android 蓝牙通信实现的主要过程及开发函数。②Android 多线程及消息机制:测量机器人与Android 蓝牙通信及控制工作过程中涉及程序界面操作、数据的发送和接收、仪器的观测和转动等操作,不使用多线程机制,整个系统必须逐个任务的完成,不仅是耗时的操作,而且无法暂停或终止[6-7]。
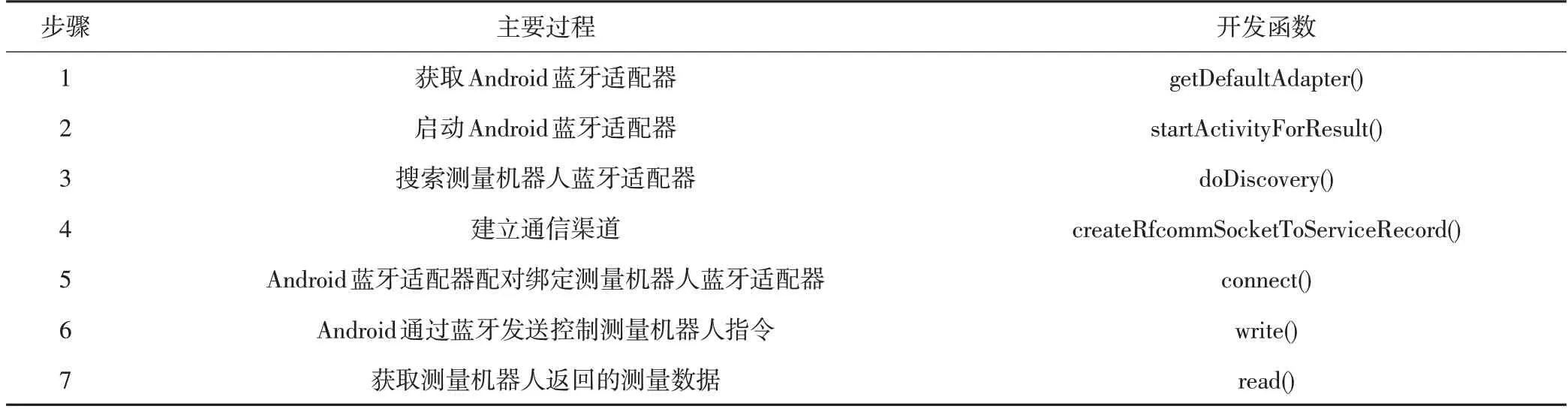
表1 蓝牙通信实现的主要过程及开发函数
Android 软件创建子线程序,在后台执行特定的耗时任务,而且在这项任务的进行过程中,需要不断地将测量机器人的进度或者测量结果展现在软件界面中,Android 提供消息处理传递机制来进行此类操作[6-7]。
3)具体实现。编制了测量机器人与Android通信控制软件,并取得了软件著作权。实现了Android 设备通过蓝牙与Leica 系列测量机器人远程无线连接,通过发送Leica GeoCom指令控制测量机器人,接收返回值(测量数据等)并以文档的形式存储在Android设备内存中。
2 内外业协同机制研究
2.1 内外业协同机制实现的一般过程及关键技术
内外业协同机制是在实现蓝牙远程无线连接及控制的基础上,实现外业测量、数据计算及传输、图形绘制、信息反馈、成果制作等工作的多终端同步。此种机制能应用在超高层建筑、地铁、桥梁及滑坡体变形监测,大型设备安装,工程建造,大型油罐体积测量等诸多领域(图1)。主要过程如下:

图1 内外业协同机制一般过程
1)Android 外业设备利用开发的测量程序通过蓝牙与测量机器人进行无线通信及控制,获取的测量数据通过蓝牙实时传回Android 设备并储存为内业设备软件可读取的文件。
2)Android外业设备通过5G等数据网络将测量数据文件传给内业设备,内业设备对数据进行读取检查、数据计算、结果分析、指标核查等。
3)内业设备将坐标成果文件、指标核查情况、数据分析报告、变形预警信息、设备安装动态等通过数据网络传给Android外业设备。
4)Android 外业设备可共享内业成果,同步进行草图绘制、核查、预警及动态信息反馈等[8],内业设备可同步进行图形绘制及成果整理等工作。
根据上述过程,内外业协同机制实现需有3 种关键技术的支持,第一种关键技术是测量机器人应同步采集控制及碎部数据供内业计算。第二种是测量机器人采集的数据需通过蓝牙无线传输至Android 设备并通过移动网络传输至内业设备。第三种是Android 设备接收展示内业成果,并能进行草图编绘等操作。
2.2 内外业协同机制实现及应用
内外业协同机制已在规划测量领域得到了较好的实现及应用,图2是主要的作业过程。

图2 内外业协同机制应用于规划测量示意图
1)Android 设备利用编制的测量软件实现与测量机器人蓝牙远程连接及控制,并发送GeoCom 控制指令采用改进的一步测量法[9]同步采集控制及碎部原始数据,其中涉及规划核查的角点进行特殊点名标识。然后通过蓝牙传回Android 设备储存为内业软件可读取格式的文件。
2)Android 设备通过即时通信软件将测量数据文件传给内业设备,内业设备对数据进行读取检查、数据计算,绘制涉及规划核查的建筑边线并标注退距等情况,并将坐标成果及核查情况传输给外业Android设备。
3)外业人员将规划核查信息反馈给建设方,Android 设备测量软件展绘坐标同步进行草图绘制等工作。
内外业协同机制在规划测量的应用改变了常规逐步实施的作业方式,并能及时反馈建设工程的规划符合情况,提高了工作效率,取得了良好的社会效益及经济效益。
3 结语
基于测量机器人与Android 通信控制实现的基础上,提出了外业测量、内业成图、外业核查的协同作业机制。在规划测量领域得到了较好的应用,并能推广在变形监测、设备安装等领域,极大的提高了作业效率,同时为测量机器人与Android 通信控制、远程或自动测量技术研究、Android 测量程序开发提供了参考。研究成果若与Android GIS 类地图应用等结合,并利用移动设备搭载的GPS等实现项目路线规划、作业监测及应急救援、现场情况调查及上传等,能进一步提升项目管理能力。
猜你喜欢
江苏安全生产(2022年10期)2022-11-02 09:37:32
建材发展导向(2022年12期)2022-08-19 02:32:00
地理信息世界(2021年2期)2021-08-14 02:11:02
民用飞机设计与研究(2020年4期)2021-01-21 09:15:00
林业科技(2020年3期)2021-01-21 08:28:52
西部交通科技(2021年9期)2021-01-11 12:55:36
中国交通信息化(2019年3期)2019-06-18 11:07:36
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
江西建材(2018年4期)2018-04-10 12:37:50
中国资源综合利用(2017年2期)2018-01-22 02:45:02