液压支架姿态智能监测系统的应用研究
2023-11-04 06:30:30张丽霞
西部探矿工程 2023年10期
张丽霞
(晋能控股装备制造集团大同机电装备有限公司,山西 大同 037000)
就煤矿而言,其井下支护最关键的就是液压支架,使用的液压支架是否安全、可靠、稳定和其综采作业是否安全的关联性比较大。由于井下综采越来越信息化与智能化,就慢慢开始使用液压支架的跟机自动控制系统,这样就使支架更加安全,使支架调整更加高效。可是,因为井下有比较复杂的地质条件,所以,当液压支架进行跟机运行时,就存在没有调整到位的状况出现,此时,就要借助人工来对调整实施辅助,就会对支架跟机自动运行控制技术在井下的使用有很大影响,并且也会对井下综采作业的安全性与效率有很大影响[1]。
能否准确监测液压支架所运行的姿态决定了液压支架可不可以及时调整与调整到位,固有的支架位姿监测就是监测工作的压力,若判断模式比较单一,以地形比较复杂为前提,不能使监测更加准确这一需求得到满足,所以,将新型液压支架智能姿态监测系统给提出来,把多传感器监测当作中心,经过综合判断与监测模式,来监控支架所有运行情况。按照使用得知,提出的新型液压支架智能姿态监测系统可以提高其姿态监测的准确度,提高了88.4%,使其不间断运行监测、调整与报警得以实现,非常值得推广[2]。
1 多传感器信息融合智能监测的基本原理
把不同的多个传感器所监测的所有信息的分析与汇总就是多传感器信息融合,在进行分析期间,可以按照监测目标所发生的所有数据来自动将决策层、特征层、数据层这3部分进行融合,以下就是多传感器信息融合所具有的优势:
(1)非常多的信息被多信息融合技术所分析与归类,且分析与归类是比较智能的,在有重合数据出现时,系统就会筛分重合部分,防止重复进行分析,使数据分析更加准确、更有效率;
(2)因为多传感器有非常大的数据量,传感器不同,其监测信息的局限性也会不同,整个液压支架运行状态的有效判断不能由单一数据来实现,经过分析融合的数据,就可以分析整个液压支架运行情况,使数据分析更加可靠与准确;
(3)系统具有较高的稳定性,因为井下有比较恶劣的施工环境,所以,当进行监测时,就会有不少干扰源出现,使数据监测的最后结果的精准程度降低,通过对信息融合技术的使用,可以将识别干扰信号这一效果提高,使系统更加稳定[3]。
将多数据模块组合这一模式使用到多传感器信息融合系统中,由于模块的不同,所以,所承担的功能也不同,比较简单的系统结构、较好的可靠性,可以按照真实状况来拓展,这样可以更加灵活的使用。图1就是其结构示意图。
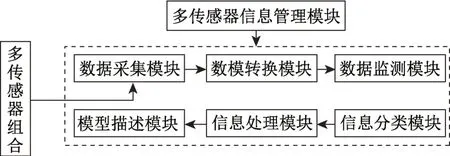
图1 多传感器信息融合系统结构示意图
由于要准确分析数据信息,就会将同种类型的传感器使用到此系统中的数据层中,这样可以准确分析数据信息,有助于修整数据所产生的偏差量,有比较大的运算量出现在该层级中。由于要将较大数据运算量这一缺点进行解决,就会将数据信息融合结构中的特征级层的融合使用到系统中,该结构可以提前把其数据信息合并与分类,进而使运算量下降,可是,此层级运算结构中存在的缺点就是不能快速融合传感器中的数据,且传感器的类型不同,所以,将信息和决策融合技术使用到系统中,第一步就是要关联分析与收集传感器数据信息,且传感器的类型是不同的,继而在进行提交,并运算,进而使系统整体的可靠性与稳定性提高,图2就是其运算决策结构图。
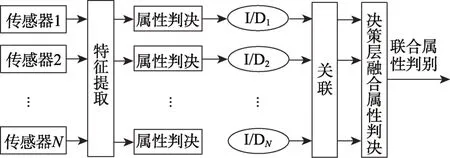
图2 运算决策结构示意图
2 设计液压支架的硬件监测系统
由于要使液压支架能够可靠工作,第一步要做的就是提取其最主要的运行参数,然后确定了其位移、倾斜度与工作压力等信息就是数据监测参数,采集的所有数据信息会被数据接口传递至测控中心,然后在被监测系统实施数据融合,使数据信息更加安全,图3就是其结构示意图。

图3 液压支架硬件监测系统结构示意图
从图3能够发现,位置监测、惯性测量、倾角单元等模块构成了液压支架硬件监测系统的结构。使用到倾角单元模块的传感器是固体的、摇摆式的。井下的液压支架的一般工作倾角在20°~40°的范围中,所以,在对倾角传感器进行选择时,一定要在20°~40°的范围中,不用将测量范围变大,进而可以将成本降低。由于要准确监测,要在液压支架中有较好稳定性的位置上设置传感器,防止在工作时因为位置发生改变而导致监测数据的准确性下降[4]。
当进行系统监测时,其运行状态要被相应的传感器所监测,继而在把所监测的所有数据信息直接传送至多传感器信息融合系统中,然后采集的所有数据信息会被系统所分析,在明确有异常信息出现时,系统就会主动报警,还要对异常数据进行分析,初步确定故障的原因及位置,由于要迅速将故障所提供的有关数据支撑解决好,就要保证迅速地解决与定位故障[5]。
3 仿真分析
由于要分析液压支架智能监测系统的实际使用状况,就要选取MATLAB 仿真分析软件来分析此支架的控制系统具体位置监测的准确度,将ZY9200型液压支架当作案例,ZY9200型液压支架所在的位置是井下巷道中采煤机的最前部,要按照采煤机实际运行来自动移架,通过使用实物测量与仿真分析来分析该系统实际使用所具有的可靠性[6]。当仿真分析过程中,会对液压支架设置移架,移架次数是6 次,且6 个移架的位移值是0.64m、0.7m、0.63m、0.45m、0.65m、0.65m,当进行运行时[7],液压支架上活塞杆所设置的作用力是1149kN,其液压油所设置的工作压力是9MPa,图4 就是实物测量与仿真分析结果的对比图。
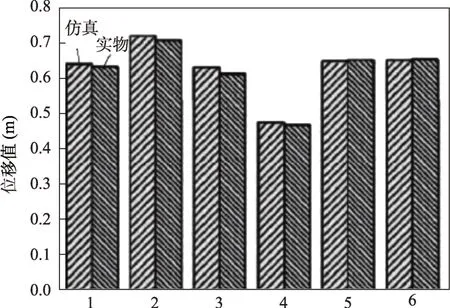
图4 液压支架仿真分析与实测结果对比图
从图4可以发现,仿真分析与实际测量二者在测量点的结果是一致的,且测量点是6个,偏差量最大值是0.01m,监测的井下液压支架运行姿态的准确度在上下0.006mm 左右,和固有监测方式进行比较,升高了88.4%,使所监测的液压支架的运行状态更加智能,使井下的支架可以稳定与准确运行[8-10]。
4 结束语
就液压支架的姿态监测来说,没有较高的效率与精准度是其所存在的缺点,就将新型液压支架智能姿态监测系统给提出来,经过对多传感器信息融合系统进行使用,可以使所监测的多传感器更加可靠,按照实际测量与仿真分析进行对比发现:
(1)重合部分会被系统筛分是多传感器信息融合所存在的优点,防止重复分析,使数据分析更加准确、更有效率;
(2)位置监测、惯性测量及倾角单元等模块构成了支架运行状态硬件监测系统的结构,结构具有较好的稳定性与较高的灵活性;
(3)新型控制系统可以使监测准确度上下在0.006m 左右,和固有监测方式相比较,升高了88.4%,使井下的支架可以稳定与准确运行。
猜你喜欢
保健医苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科学)(2021年8期)2021-11-20 06:08:04
学生天地(2020年3期)2020-08-25 09:04:16
重型机械(2020年2期)2020-07-24 08:16:18
模具制造(2019年3期)2019-06-06 02:10:54
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
石油化工建设(2018年2期)2018-07-11 01:24:56
凿岩机械气动工具(2016年2期)2016-11-11 07:34:04
航天器工程(2014年5期)2014-03-11 16:35:55