
面向通信的机器人机械臂运动控制系统设计
2023-10-28 00:11王熙杰
电子产品世界 2023年9期
王熙杰


摘要:针对人工清洁车辆效率低的问题,将洗车机器人引入机车清洁过程中,其中运动控制功能由工业机械臂实现。通过电机驱动器和Profinet 协议实现通信功能,控制电机位置参数及运动速度,准确识别机械臂末端位置。开展机械臂运动控制系统硬件及软件设计,其中自动化洗车运动控制系统选用的控制器芯片型号为STM32F407ZET6,并采用CH340G 芯片实现数据通信功能。该系统设计对提高自动化机车清洗效率具有一定的支持作用。
关键词:洗车机器人;运动控制系统;硬件设计;软件设计
中图分类号:TP241 文献标识码:A
0 引言
经长期使用,机车车头、内饰及车身表面必然会累积各种污染物,包括油污、灰尘等,所以定期清洁机车十分有必要[1-2]。从现有机车清洁方式来看,普遍应用人工清洁车辆的方式实现清洁目的。该方法具有较大的管理难度,实际工作效率也较低;从技术能力方面考虑,不同洗车人员之间存在的差异较大,针对同种车辆难以保证一致的清洁效果,特别是清洁难度较大的车顶区域[3-4]。针对上述问题,相关学者研究制定了高效的机车清洁方案,以多轴工业机械臂作为技术支撑,在机械臂尾部安装清洁设备和摄像头。其中,数据采集功能由摄像头完成,清洁功能则需控制机械臂运动实现。对构建的机车三维模型的清洁模式进行测试,发现各种车型清洁效果都表现良好,水量消耗变少,洗车场人力成本显著降低,清洗效率也得到提升[5-6]。
针对人工清洁车辆效率低的问题,本文将洗车机器人引入机车清洁过程中,运动控制功能由工业机械臂实现。
1 自动化洗车运动控制系统设计
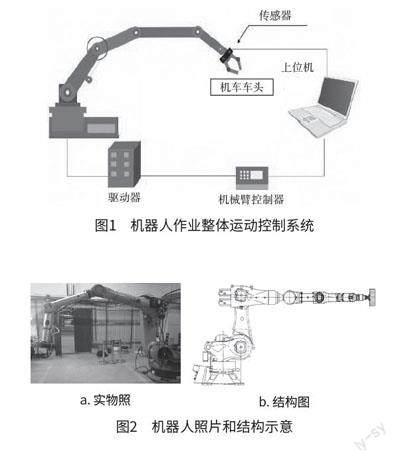
将洗车机器人的机械臂用于机车车头外表面清洗。该机器人主要由视觉信号处理系统、运动控制系统和电机驱动系统组成,机器人作业整体运动控制系统如图1 所示。安装在多轴机械臂末端的传感器对机头轮廓完成扫描后,在上位机完成车头点云的拼接,将处理后的坐标数据发送给机械臂控制器,再将坐标数据解析成机械臂各轴旋转角并生成相应报文,通过Profinet 通信协议把该报文发送至驱动器,驱动机械臂完成相应清洗动作。
2 机械臂运动控制系统设计
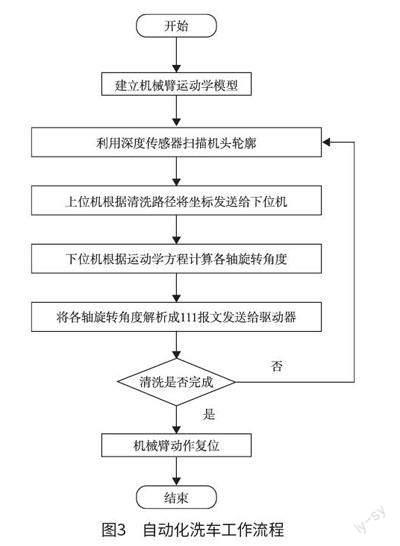
本文选取的研究对象为KUKA 工业机器人,型号为VKRC2 2005 版, 其机械臂供电方式为400 V 三相交流电,总重量达190 kg,控制精度可达0.5 mm。将3 个旋转控制关节设置在此机械臂中,该机器人照片和结构示意如图2 所示。运动控制系统共分为两个部分:一是由下位机处理程序与上位机界面程序构成的軟件程序;二是内嵌最小运行系统、总线通信模块及嵌入型微控制器的硬件运动控制系统。
运动控制功能由工业机械臂实现,通过电机驱动器和Profinet 协议可实现此模块的通信功能,控制电机位置参数及运动速度需使用111 报文完成,从而准确识别机械臂末端位置,同时各报文数据均可实时接收,并在上位机中显示各轴旋转角及相关数据。定位功能、机头轮廓测试及机械臂运动控制等功能都包含在上位机中,其可以完成对机头轮廓清洗路径的设定、关节点运动信息的传输、机车位置数据的处理和机头轮廓的测试以及机械臂运行状态的高效监控[7]。
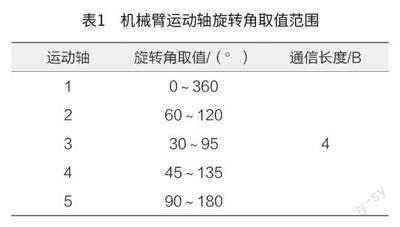
单目摄像头内嵌于机器人运动控制系统中的机械臂尾部[8],因而在扫描机头轮廓时,可以实现高效扫描。自动化洗车工作流程如图3 所示,首先规划洗车具体路径,并向下位机传输路径对应的坐标数据;其次参考坐标数据对各轴旋转角进行逆运动学计算;最后将解析获得的111 报文发送给驱动器。
3 硬件设计
运动控制系统硬件结构如图4 所示。由电机驱动器发送报文数据,电机实际运行情况可通过驱动器的反馈信息进行判断。利用Profinet 协议构建通信模块与驱动器之间的联系,单个电机的运行控制由对应驱动器实现。
为确保机器人作业正常,对于控制器芯片的要求较高,需满足运行状态稳定、浮点数据运行性能佳、运算速率高效等条件[9]。本次选用的自动化洗车运动控制系统的控制器芯片型号为STM32F407ZET6,整体性能比之前的芯片产品更优,还可有效控制制造成本,完全满足机器人作业系统应用需求。
4 软件设计
4.1 电源及串口通信电路
如图5 所示, 二路电源输入在控制器芯片中,K1 开关与保险管F1 连接VUSB, 将U4-AMS1117-3.3芯片输入,并输出直流3.3 V 电压,同时对STM32F407ZET6 控制器芯片供电。将VOUT与VUSB 连接, 直流电压输出值为5 V,3.3 V电压在供电状态下即可获取,供电设备可选取相应适配器,通过USB 可实现在低功耗状态完成供电。
通常情况下少量数据就能使下位机和上位机实现速度调控、电机运行开关控制等通信控制,所以在实际通信时将RS232 接口作为首选。但目前笔记本电脑中几乎不再配置RS232 接口,串口信号到USB 信号之间的转变可采用CH340G 芯片实现,上位机与下位机间仅需一根USB 线就可实现数据通信功能。
4.2 上位机与下位机通信
实际作业中机器人数据通信时,首先,其上位机机械臂末端位置设定之前需执行运动控制命令,下位机接收上述数据后解析具体命令;其次,各机械臂运动轴的旋转角采取机器人逆运动学方程完成计算,旋转角取值范围如表1 所示;再次,向驱动器传输上述数据;最后,将驱动器发送的反馈数据进行接收,向上位机传输机械臂各轴关节角相关数据。
计算机向运动控制系统发送操控命令,为保证高效传输和交换控制命令、数据等各项参数,构建的通信协议需得到微控制器和计算机的支持。微控制器和计算机在处理数据时要求数据格式必须为二进制,以此为标准采用下位机控制对计算机输出二进制信息进行准确解析,机械臂各项参数及实际运动状态数据可通过机械臂控制功能来获取,计算机上位机程序传输的数据结果需严格依据协议标准进行转换。控制帧作为一种命令参数与坐标由计算机程序生成,并需向下位机系统进行传输。电机运动状态控制参数和多个控制指令均包含在通信协议中,机械臂自动化洗车效率容易因协议质量水平的变化而受影响。
5 结论
针对机车清洁出现的相关问题,本文开展机器人机械臂运动控制系统的硬件及软件设计,得出以下3 点结論。
(1)自动洗车运动控制功能由机械臂实现,通过电机驱动器和Profinet 协议实现通信功能,控制电机位置参数及运动速度,准确识别机械臂末端位置。
(2)选用的自动化洗车运动控制系统的控制器芯片型号为STM32F407ZET6,整体性能比之前的芯片产品更优,可有效控制制造成本。
(3)采用CH340G 芯片实现信号转变,上位机与下位机间仅需一根USB 线就可实现数据通信功能。可将驱动器发送的反馈数据进行接收,并向上位机传输机械臂各轴关节角相关数据。
参考文献
[1] 储昭碧,李健,孔艳,等. 基于S7-1200 的全自动洗车控制系统的设计[J]. 电气传动,2016,46(9):62-65.
[2] 侯晓琳,姚健鹏,王剑男. 基于点数据集三维空间曲面三角化算法实现[J]. 科学技术与工程,2017,17(22):155-161.
[3] 李文峰,冯永明,袁海润. 基于微信平台的洗车服务系统[J]. 西安科技大学学报,2017,37(3):445-449.
[4] 钟石根,张良杰,朱丽敏,等. 基于物联网技术的自助洗车系统设计[J]. 现代电子技术,2017,40(20):1-4,9.
[5] 倪伟,吴英涛,赵晓贺. 玻璃幕墙清洗机器人清洗系统的设计[J]. 南方农机,2017,48(16):40.
[6] 金玉阳,张明路,高庆吉,等. 5R1T 型飞机表面清洗机器人机械臂设计及其逆运动学分析[J]. 机床与液压,2013,41(12):33-37.
[7] 沈跃,潘成凯,刘慧,等.基于改进SIFT-ICP 算法的 Kinect 植株点云配准方法[J]. 农业机械学报,2017,48(12):183-189.
[8] 陈学伟,朱耀麟,武桐,等.基于SAC-IA 和改进ICP 算法的点云配准技术[J].西安工程大学学报,2017,31(3):395-401.
[9] 王奇,秦剑,柯坚,等. 接触网绝缘子自动水冲洗车载体位姿隔离与补偿[J]. 机床与液压,2018,46(16):92-95,98.
猜你喜欢
商情(2016年42期)2016-12-23
科技资讯(2016年19期)2016-11-15
