弹载SAR回波模拟关键参数并行计算方法
2023-10-25 01:46孙厚鹏
仪器仪表用户 2023年11期
孙厚鹏
(北方工业大学 信息学院,北京 100144)
0 引言
弹载SAR 是一种特殊的,无法重复利用的产品,对其真实性能的检测和验证无法在其实际工作的环境下进行。部分功能性的验证可以在机载挂飞的实验条件下进行,但由于该方法无法模拟导弹真实的飞行条件,其核心性能与系统整体设计的完成度必须依赖地面上的仿真系统,即雷达回波模拟器。雷达回波模拟器可以对导弹真实工作条件下的环境进行模拟,包括导弹的速度、导弹的高度、SAR波束以及SAR 回波参数等信息,实现对弹载SAR 的成像功能、高度测量功能、波束指向功能及射频输出信号的功率和波形等指标的测试。
本系统的应用场景是弹载SAR 回波模拟,弹载SAR雷达照射地面区域范围大,区域变化速度快,计算量很大,但同时又对实时性要求非常高,所以本系统采用了FPGA与DSP 相结合的处理方式,二者通过SRIO 接口传输数据。其中,DSP 负责给FPGA 提供当前时刻雷达波束照射地面区域的坐标信息,FPGA 负责给DSP 提供弹道参数并通过DSP 计算的坐标信息读取基准图中的灰度信息(RCS 信息)和高程信息,本文主要讨论DSP 的处理流程。
1 关键参数计算系统流程介绍
1.1 回波产生原理
合成孔径雷达(SAR)的基本工作原理是通过装载基准图等数据包来实时计算回波特征传递函数,并将其与雷达激励信号实时卷积,从而产生合成回波信号。当模拟器接收到当前的弹道参数、雷达参数和基准图数据时,它会实时计算回波信号,以模拟雷达的实际工作情况。在这个过程中,模拟器会使用一系列的数学算法和模型来模拟信号传输和回波信号的形成,以产生准确的模拟结果。
地面上某一时刻照射到的某点的回波信号公式为
公式(1)中,S 表示为经过时间延迟的雷达激励信号;表示地面上一个点的复反射系数。相对雷达距离为R 的复反射系数G 可以表示为
式(2)中,A为复反射系数的幅度,表示该点后向散射系数值(复数RCS)。反映了由于距离延迟引起回波相位延迟,该项取决于距离R 和波长λ。
地面上的每个散射点都有自己对应的幅度值和距离。现定义一个一维数组,该数组的序号表示与导弹的距离。将所有散射点累加到数组中,按照距离的不同将散射点分配到不同的数组单元中,可以得到回波特征传递函数,该传递函数按照距离一维排列。公式表现为
即雷达激励信号经延迟τ、调幅、调相后叠加。采用该种方式,实现公式的计算量会很大。式(3)可进一步写为
即回波信号为一个回波特征传递函数和雷达激励信号的卷积,回波特征传递函数定义为
式(5)中,An为模拟器从基准图中读取获得,为此需要计算所有参与回波计算的散射点的具体位置,获得基准图中散射点的坐标,即块号。
1.2 块号计算方法
首先,根据当前时刻成像系下雷达的位置、雷达的波束指向和波束宽度确定场景坐标系下照射区域的范围,再根据场景坐标系下照射区域范围内的坐标,经过坐标系变换,得到基准图坐标系下的坐标,即块号坐标。
场景坐标系建立的是L×L 的坐标系,一般L 取值为雷达最大作用距离的两倍,可以认为该坐标系是北天东坐标系,X 为东向,Y 为北向,Z 为天向,所有的辅助数据都是根据此坐标系生成的;基准图坐标系是以基准图的左上角作为(0,0)点的,因此在该坐标系中所有点的坐标值全为非负数;成像系将导弹在基准图上的投影点(弹下点)作为成像系的原点,以导弹速度方向在基准图上的投影方向作为X 轴方向,Y 轴为天向,Z 轴与X/Y 轴满足右手法则,且导弹的速度矢量在基准图上的投影以相对于正北方向的航向角来定义。
模拟器使用的辅助数据是将场景坐标系中每个散射点的坐标进行处理,根据同心圆算法的要求,预制出的便于DSP 按照距离-角度方式读取坐标信息的数据。利用辅助数据,DSP 可以在确定了雷达波束照射区域距离弹下点最近和最远距离以及照射区域方位向边界与弹下点的夹角之后,直接读取照射区域的坐标值。
为了得到基准图坐标系下的块号坐标,还需要进行坐标系变换,将场景坐标系下的坐标转换到基准图坐标系下。具体的坐标系转换规则如下:
以成像系Y 轴为轴旋转成像系,使得成像系的X 轴和Z 轴分别与基准图的X′轴和Y′轴方向相同,建立新坐标系X1,Y1,Z1。
θn从X 轴原点向正向看,左向偏转至正北向(180°范围)角度为正,右向偏转至正北向(180°范围)角度为负,则XOZ 需要逆时针转到X1-O-Z1 系,根据右手系以Y 轴旋转的坐标旋转公式,平台位置在X1OZ1 坐标系下的坐标为
θ角从Y 轴正向向负向看,若逆时针旋转则为正值,顺时针旋转则为负值,因此采用逆时针旋转,则θ=90°-θn≥0或者顺时针选转,则θ=360°-(θn-90°)。根据以上公式同样可以算出场景中心点XC,ZC 在X1-O-Z1 坐标系下坐标(X1C,Z1C);由于场景中心点在基准图系X′-O′-Y′下的坐标为(L/4,L/4),因而根据坐标系平移公式,算出平台位置在基准图系的坐标为
搜索到的照射区域是在场景系的坐标(X2,Y2),再根据平台位置在场景系的坐标将搜索到的区域平移到基准图系的相对位置(X3,Y3)。
根据上述坐标系变换原则,可以得到基准图坐标系下的块号坐标。
2 多核并行搜索方案
目前常见的DSP 并行方法有:①数据并行(Data Parallelism)可以通过主从方式实现数据并行,实现方法是通过主处理器进行任务划分,各处理器执行相同的操作。对于数据资源占用较少,相互依赖关系低的数据采用这种方式可以提高处理性能。主从并行方式就是数据并行的主要方法;②任务并行(Task Parallelism)可以通过流水方式实现,流水模式是各个核处理同一块数据,每个核处理不同的算法,数据从一个核传给另外一个核用于更深一层次的处理。本系统采用主从方式作为并行设计方法,选取核0 作为主核,核1 ~4 作为从核,5 个核进行并行处理。
2.1 分段方法
为了保证系统函数计算的正确性,搜索区域的长度不能超过系统函数长度与距离分辨率的乘积,但当搜索区域的长度小于系统函数长度与距离分辨率的乘积时,不影响计算的正确性,所以在确定实际参与计算的搜索区域时需要对其适当缩小,使其略小于系统函数长度与距离分辨率的乘积,以保证系统函数计算的正确性。
当需要对照射区域进行删减时,以波束中心指向与地面的交点为起点,分别向距离增加和减小的方向移动系统函数长度与距离分辨率乘积的距离的一半,得到照射区域的最远距离和最近距离;根据照射区域距离向长度的缩小换算成距离向波束宽度角度值的缩小,同比例缩小方位向波束宽度的角度值,得到方位向的搜索范围。
2.2 核间通信
主核和从核可以通过IPC 进行通信,IPC 中常用的通信模块为Notify 模块和MessageQ 模块。本系统采用MessageQ 模块进行多核通信,便于传递搜索参数。主核首先计算好搜索参数,然后向从核发送MessageQ 消息,消息中包含开始搜索标志位与搜索参数。从核A 接收到消息后,根据搜索参数确定A 核的计算任务。当任务计算完成后,向主核发送结束搜索标志位与核心编号A,用来告知主核已经完成计算任务的从核ID。主核通过接收到的从核发送的MessageQ 消息,判断出已经完成任务的核心数量与编号,当所有核心完成计算任务后,主核将所有核心的计算结果打包发送给FPGA 并等待下一个计算任务。
2.3 任务分配
本系统中主核的任务是计算搜索参数,给从核分配计算任务,同时负责与FPGA 进行数据的收发。
本系统中从核根据主核分配的计算任务进行计算,任务分配的原则是每个从核平分计算任务,尽可能地缩短计算时间。分发的原则是根据等距离圆的序号进行分发,具体来说,如果需要计算的等距离圆总数为X,核心数量为M,那么核m 计算等距离圆序号((m-1)X/M+1)到((m-1)X/M+ X/M)之间的数据,每个从核计算的任务量基本相同。
3 结果分析
3.1 块号搜索结果对比
C6678 中搜索块号的结果如图1 所示,相同的参数用MATLAB 搜索的结果如图2 所示,将二者的搜索结果用MATLAB 绘制到一起进行对比的结果如图3 所示。可以看出C6678 的搜索结果与MATLAB 的搜索结果完全一致。
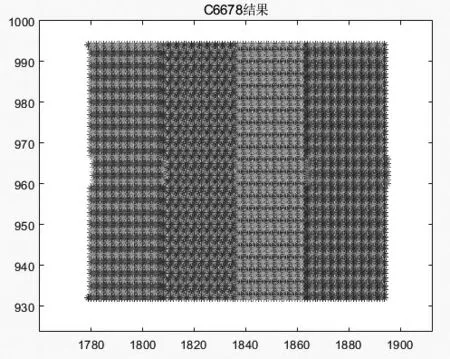
图1 C6678结果Fig.1 C6678 Results
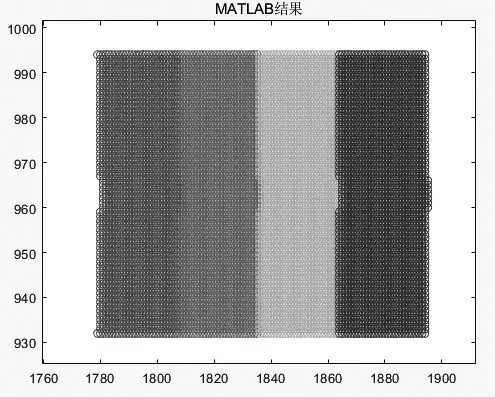
图2 MATLAB结果Fig.2 MATLAB Results
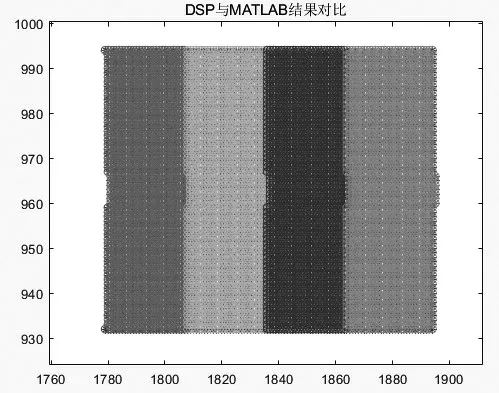
图3 DSP与MATLAB结果对比Fig.3 Comparison of DSP and MATLAB results
3.2 单核计算耗时与多核计算耗时对比(时钟数)
C6678 单核计算系统耗时见表1,多核计算系统耗时(主核)见表2 所示,多核计算系统耗时(从核)见表3。
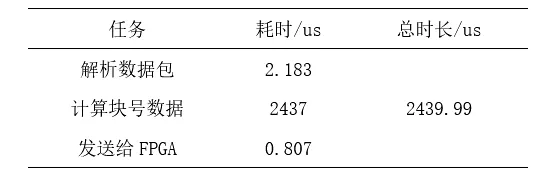
表1 单核计算系统耗时Table 1 Time consumption of single core computing system
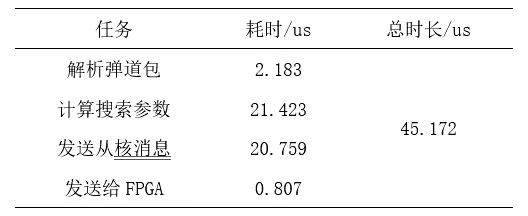
表2 多核计算系统耗时(主核)Table 2 Time consumption of multi-core computing system(main core)

表3 多核计算系统耗时(从核)Table 3 Time consumption of multi-core computing system(from core)
通过单核计算与多核并行计算的系统耗时对比可以看出,C6678 通过并行计算能够很好地提高系统的计算速度,使系统达到实时性要求。
4 结束语
本文首先介绍了SAR 回波模拟中回波信号的产生原理和块号的计算方法,然后介绍了计算块号任务的并行方法,核间通信和任务分配,给出了详细的DSP 主核和从核处理流程图,最后通过仿真数据与实际结果的对比,以及DSP运算速度的检测,验证了系统的正确性和实时性,证明了该系统能够满足SAR 回波模拟关键参数实时计算的技术要求。
猜你喜欢
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
公民与法治(2016年19期)2016-05-17
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
读者·校园版(2015年7期)2015-05-14
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28