
基于无人机影像深度学习算法的输电线路缺陷智能识别技术研究
2023-10-25 08:37:04许文涛
机电信息 2023年20期
许文涛
(中国南方电网有限责任公司超高压输电公司柳州局,广西 柳州 545000)
0 引言
无人机遥感技术的兴起,为输电线路巡检带来了新的机遇。无人机遥感具有便捷、灵活、低成本、多角度、高时空分辨率的特点,能大幅降低地面人工巡检的劳动强度和作业风险,显著降低数据获取成本[1-2]。但是如何从海量数据中快速提取有价值的信息,成为摆在我们面前亟需解决的问题。
随着人工智能新时代的开启,深度学习为计算机视觉领域带来了革命性的进步,为解决该问题提供了方案[3]。
深度学习不需要人工设计提取特征,可以较好地应对背景复杂、场景多变、目标特征多样化的电力巡检可见光图像,高度契合电力巡检中海量可见光图像智能化处理的需求,通过引入深度学习方法,可以实现目标的智能识别,进而实现线路设备的缺陷检测[4]。
因此,研发基于无人机遥感与深度学习算法的输电线路智能巡检平台,不仅是“新基建”的迫切要求,而且将使老旧线路焕发出新的活力,因而具有重要意义和巨大的市场潜力。
根据国网(运检/4)305—2014《国家电网公司架空输电线路运维管理规定》,架空线路设备缺陷管理系统规定了878种缺陷。由于部分类型的缺陷根据危害等级被划分为3种(如绝缘子自爆缺陷根据损坏程度不同被分为一般、严重、危急3种),统计出包括基础、杆塔、导地线、绝缘子、金具、接地装置、通道环境、附属设施等在内的8类共499种缺陷,分布如表1所示[5]。
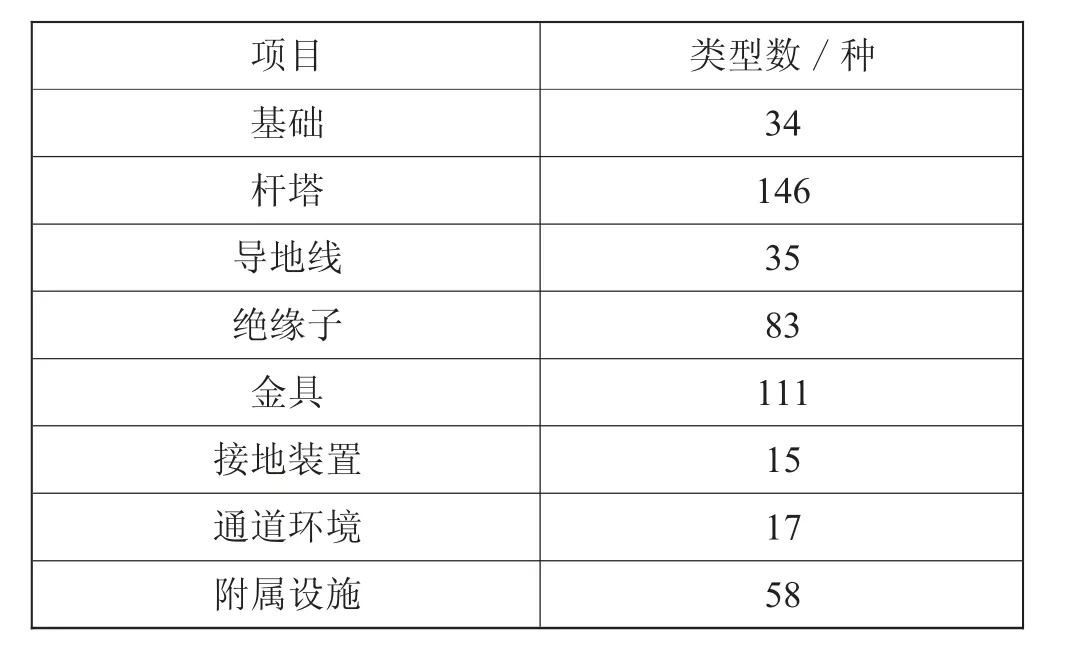
表1 线路巡检常见缺陷统计
从表1缺陷类型分布看,杆塔、金具、绝缘子类缺陷较多,占缺陷总量的68%。基于可见光图像,使用图像处理的方法进行架空线路的缺陷检测可以覆盖约90%的缺陷[5],仅有30余种缺陷难以根据可见光图像确定。随着无人机遥感技术和深度学习算法的发展,国内外在输电线路缺陷检测领域已经开展了大量的研究,取得了不少研究成果。
1 Yolov5目标检测算法原理
Yolo系列模型经过不断改进,已推出多个版本,但其结构均是由输入层、Backbone、Neck(自Yolov3增加该层)、Head和Prediction(输出层)组成[6]。
在Yolov5 的官方代码中,给出了Yolov5s.pt、Yolov5m.pt、Yolov5l.pt、Yolov5x.pt四个权重模型,其中,Yolov5s网络是Yolov5系列中深度最小、特征图宽度最小的网络,其检测速度最快,但精度也相对较低[7];其他三种结构则是对网络加深加宽,精度提升的同时速度降低。用户可以根据需要选择合适的模型。
在输入层,Yolov5首先对图像进行Mosaic增强,通过随机缩放、裁剪、排布等方式,丰富了数据集,提升了小目标的检测效果。
其次,Yolov5将初始锚框的计算嵌入到代码中,使得在每次训练时,程序可以自适应地计算不同训练集中的最佳锚框值。
最后,Yolov5改进了图像填充算法,算法根据图片的长宽比自适应地计算需要添加的像素数,从而缩减了黑边的范围,降低了信息冗余,提高了推理速度。
在Backbone层中,Yolov5首先采用切片操作,即Focus结构,在减小图像长宽的同时增加了图像通道个数[8]。
进而,Yolov5继承了Yolov4的CSPDarknet53 结构,但分别在Backbone和Neck中使用两种不同的CSP结构。在Backbone中引入残差组件,而在Neck中,则使用Convolution-Batch Normalization-LeakyReLU组件。
在Neck层中,一方面,Yolov5采用了CSP结构,加强了网络特征融合的能力;另一方面,采用了FPN(Feature Pyramid Network)+PAN结构,FPN层自顶向下传达强语义特征,而特征金字塔则自底向上传达强定位特征,两两联手,从不同的主干层对不同的检测层进行参数聚合。
与之前的版本类似,Yolov5最终输出为三个不同尺度的特征图,对于不同尺寸的目标识别具有较好的鲁棒性。Yolov5采用GIOU_Loss作为定位损失函数,采用加权nms的方式,提高了被遮挡物体的检出率。
2 数据获取与预处理
基于2020年7月至9月无人机巡检获取的500 kV输电线路共362张缺陷照片开展研究,照片像素数为5 472×3 078,这些照片已经过专业检修人员和同类缺陷识别软件的筛选。由于无人机影像较大,考虑到硬件配置和计算效率,将影像进行四等分裁剪,裁剪后获得1 448张图像。
本文利用lableImg软件对这些照片进行了样本的标注,共获取绝缘子类缺陷样本1 056个,导线类缺陷260个,金具类缺陷328个,杆塔上有鸟巢图片471个。为扩充样本数量,增强特征学习能力,使用Mosaic增强模块对样本进行了旋转、颜色空间变换、模糊和镜像变换。通过上述数据预处理,剔除没有目标信息的图像,得到了共3 696张缺陷图片,用于后续模型的训练和预测。
3 平台构建
本文采用的运行环境为Windows10系统,64位,处理器为Intel(R)Xeon(R)Silver 4210 CPU@2.20 GHz/2.19 GHz,内存32 GB,主频3.0 GHz,显卡为GPU NVIDIA GeForce RTX 2080Ti,显存11 GB。本文缺陷检测算法研究选用的CUDA版本是10.2,集成开发环境是VSCode,使用Python3.7和Pytorch深度学习框架开发。
输电线路主要缺陷智能识别软件为网络版,系统采用B/S架构和分用户管理的方式,基于Cesium开源三维可视化引擎、PostgreSQL数据库管理系统和Pytorch深度学习框架构建基于无人机影像深度学习算法的输电线路主要缺陷智能识别软件。系统具有无人机光学图像样本制作、模型分布式训练、模型测试、缺陷诊断和确认以及检测报告生成等功能,可识别杆塔、绝缘子、金具等主要缺陷[9]。
平台架构如图1所示。系统同时具备三维GIS功能(如三维可视化、数据库管理系统、空间分析等)和无人机遥感图像处理功能(如数据预处理、基于深度学习算法的输电线路缺陷检测),可以生成训练报告、测试报告和缺陷识别结果评估报告。
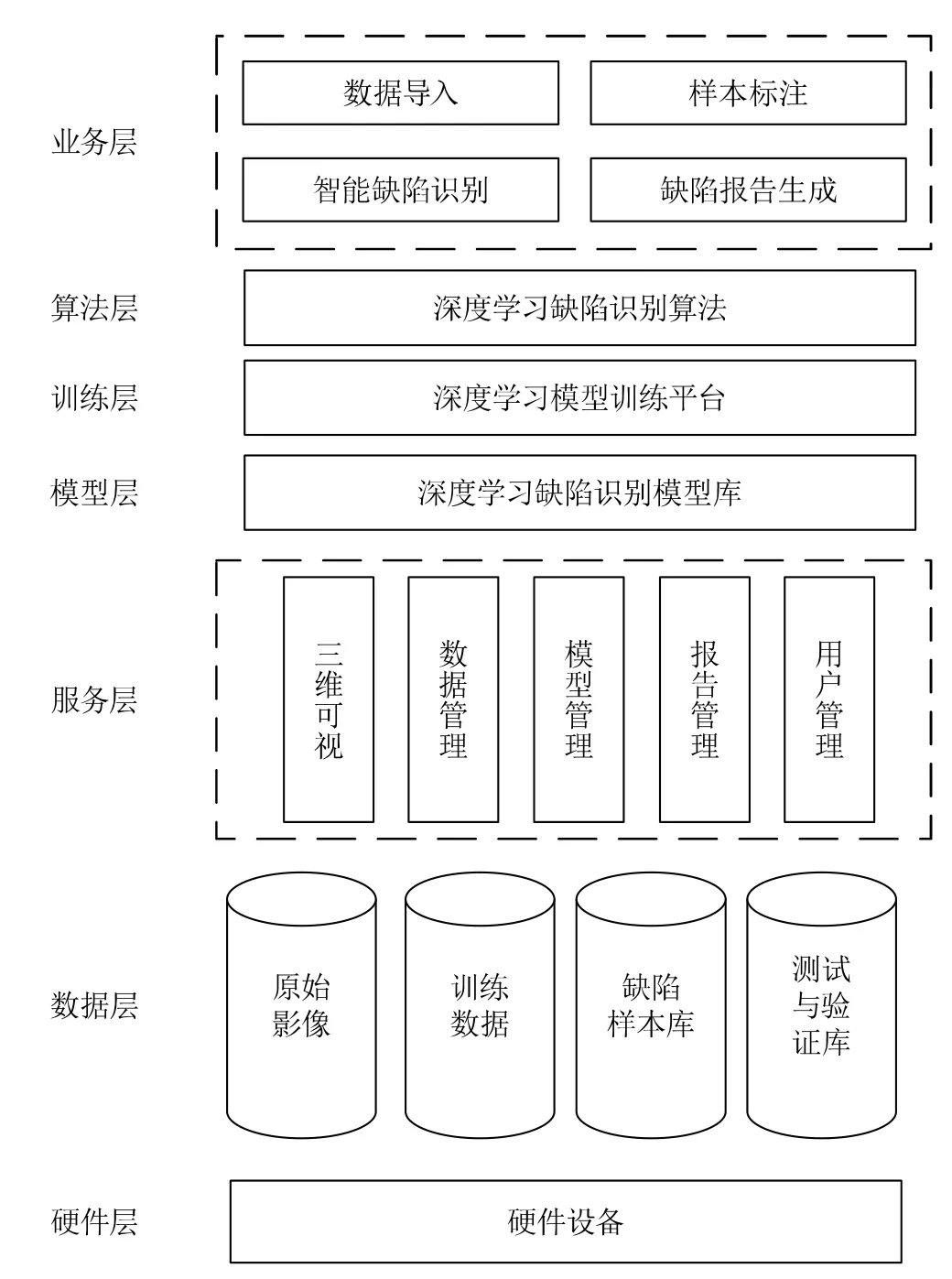
图1 系统架构图
4 算法验证
4.1 模型训练
平台选择Yolo5s模型进行输电线路缺陷检测,训练数据和验证数据的比例为9:1,每次输入网络中图像的数量为16,初始学习参数为0.01,迭代次数为500次,IoU阈值设为0.5。绝缘子自爆类缺陷训练结果如图2所示。
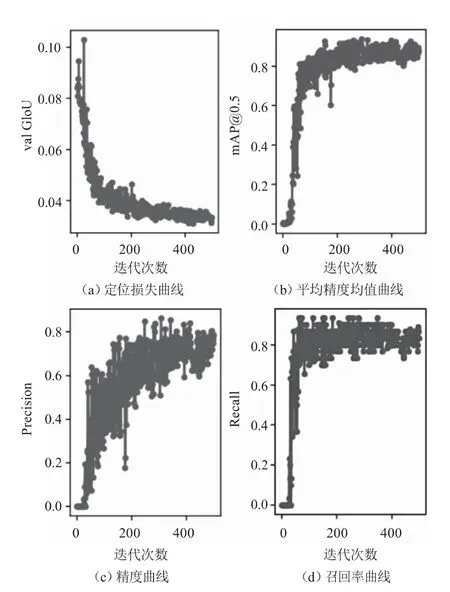
图2 绝缘子自爆类缺陷训练结果
4.2 缺陷检测
采用前述模型和软件识别出的缺陷结果如图3所示。其中绝缘子类缺陷包括绝缘子自爆、伞裙损坏和放电烧伤;金具类缺陷包括防振锤锈蚀、损坏,线夹锈蚀,接线管弯曲;导线类缺陷包括导线跳股、缠绕不合格等。
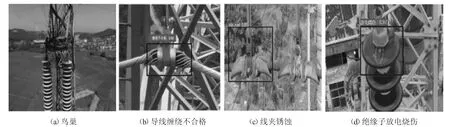
图3 不同类型缺陷识别结果
4.3 模型验证
本文对不同缺陷类型的识别精度进行了分析。表2列出了不同类型缺陷的识别精度和识别召回率。
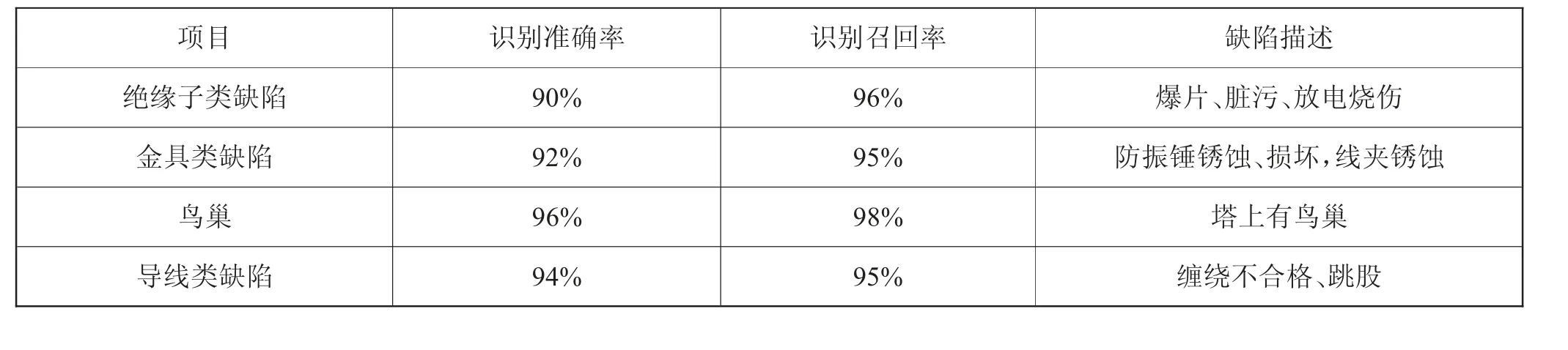
表2 缺陷检测结果
从表2可以看出,整体缺陷平均识别精度均值达93%,鸟巢识别精度最高,为96%,绝缘子类缺陷识别精度为90%,略低于金具类缺陷和导线类缺陷的识别精度,这是因为绝缘子缺陷相对较小,在进行多尺度特征提取的过程中容易漏掉,因此提高绝缘子自爆、烧伤等小目标缺陷识别精度是后续的重要工作。
5 结束语
本文基于Yolov5目标检测算法和无人机巡检获取的可见光照片,实现了输电线路绝缘子、金具、导线等主要缺陷的智能识别。研究表明,使用文中模型对输电线路主要缺陷识别的平均精度均值可达93%,平均召回率96%。
本文提出了可泛化的输电线路多缺陷检测模型,研发了基于无人机影像深度学习算法的输电线路主要缺陷智能识别软件,为开展输电线路的快速智能巡检、缺陷检测模型的扩展和优化提供了基础平台。
Yolov5是一种轻量级的深度学习算法,在今后的工作中,可以将训练好的模型嵌入到移动端,乃至无人机平台,实现边缘计算,以进一步提高检测效率。基于可见光图像开展深度学习缺陷检测算法研究,在实际工程应用中,激光点云数据对于通道类缺陷(如树障等)检测具有优势,红外图像对于温度异常更为敏感,采用无人机搭载多种传感器,同步获取多源遥感数据,研发相应的缺陷检测算法,有望实现一站式输电线路智能缺陷检测。
猜你喜欢
湖南电力(2021年4期)2021-11-05 06:45:12
电子制作(2018年11期)2018-08-04 03:25:38
测绘科学与工程(2016年5期)2016-04-17 06:51:15
电测与仪表(2016年6期)2016-04-11 12:08:06
电力建设(2015年2期)2015-07-12 14:15:59
电测与仪表(2015年16期)2015-04-12 00:44:40
电子设计工程(2015年3期)2015-02-27 12:03:45
电测与仪表(2014年6期)2014-04-04 11:59:46
电气传动自动化(2014年6期)2014-03-20 13:36:25
河南科技(2014年14期)2014-02-27 14:11:53
