
基于RBF神经网络的上肢外骨骼康复机器人自适应控制方法*
2023-10-23 02:58于世伟鲁守银李志鹏
计算机时代 2023年10期
于世伟,鲁守银,李志鹏,张 强,姜 哲
(山东建筑大学,山东 济南 250101)
0 引言
近年来,机器人辅助康复治疗系统因其在改善残疾患者运动功能和避免肌肉萎缩方面的巨大潜力而备受关注,机器人技术和临床治疗经验的结合能够提供高强度、长期耐力和目标导向的康复训练[1-3]。针对于康复训练前期的患者,此类患者的患肢完全没有运动能力,只能采用被动康复训练模式来进行理疗,即通过预定的轨迹被动地执行受影响肢体的重复伸展任务。而在被动训练中,康复机器人控制系统存在的参数不确定或参数变化未知以及未知外扰等问题会降低机器人运动轨迹跟随的精度[4-5]。随着国内外机器人技术的发展,以上问题逐渐得到了解决。
有关的研究如Brahmi等[6]针对具有未知动力学模型和外部干扰的外骨骼机器人,提出了一种鲁棒自适应滑模控制方法来实现良好的轨迹跟踪,结合实验,可以得出所研究的控制律比传统的自适应控制方法效果及鲁棒性更好。梁旭等人[7]为了对人机交互中存在的动态不确定性进行估计,设计了一种模糊自适应逼近器,并设计控制律来对其进行补偿,并通过多种实验来进行对比分析,证明了该方法的可行性。
根据上述讨论,在被动训练过程中,上肢外骨骼机械臂在跟随期望轨迹运动时易受到模型不确定性以及未知外扰的影响,本文设计了一种高效、鲁棒性强的基于RBF神经网络补偿的自适应控制策略,能够针对关节摩擦、模型不确定性等未知扰动等进行逼近补偿,从而实现对外骨骼机器人良好的轨迹跟踪控制效果,从而提升患者的被动训练效果。
1 上肢外骨骼机器人
考虑到康复机器人应满足人体上肢的各项活动,则通过对人体运动机理分析,本文设计了一种外骨骼式的双臂机器人,如图1所示,其本体结构分为主从两个同型同构的五自由度机械臂、安装机械臂的悬梁臂以及连接两个悬梁臂的基座,上肢左右两臂能够实现各类人体活动,如肩部外展/内收、大臂俯/仰、小臂内旋/外旋、肘部屈/伸以及手腕外展/内收。由于外骨骼机器人采用半拟人化设计,则在实际操作过程中,机械臂与人体上肢贴合紧密,不会与上肢运动产生冲突,其控制也相对容易,可复现人体的各类简单运动[8]。
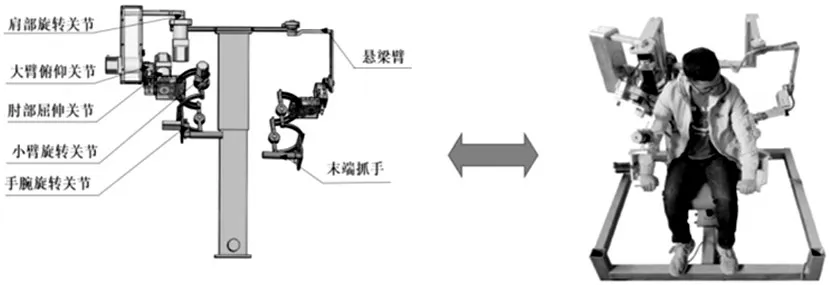
图1 主从式上肢外骨骼康复机器人整体结构
2 上肢外骨骼机器人数学模型分析
2.1 运动学建模及仿真
本文设计的机器人本体结构包含主从两个关节类型、数目完全相同的机械臂。故本文仅以从臂为例进行运动学建模。用改进型D-H 建模法[9],根据从臂各个关节的连杆关系,建立如图2 所示的D-H 坐标系,即以悬梁臂为基坐标,设点O 为其坐标系原点,将肩关节,大臂关节,肘关节、小臂关节以及手腕关节的末端分别作为各关节坐标系的原点,从而得到相邻关节间的变换矩阵T,i=1,2…5,并将这些变换矩阵进行连乘,得到末端手腕相对于基坐标的变换矩阵,O 为基准坐标系,O6为从臂手腕关节末端坐标系。其中各关节的D-H参数值和质量如表1所示。

表1 上肢外骨骼康复机器人D-H参数表和关节质量
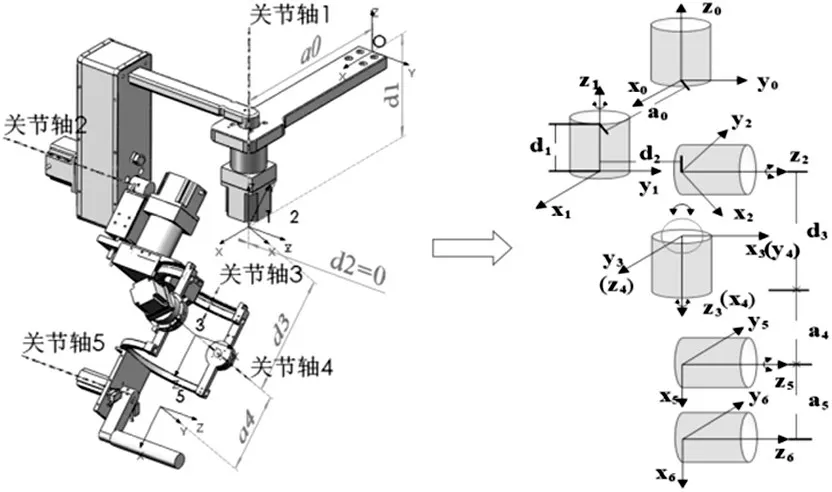
图2 康复机器人从臂运动学分析图
根据设置的上肢外骨骼从臂的D-H 参数,通过Matlab 工具箱toolbox 中的link 函数来建立连杆模型[10],进行正运动学仿真验证,即通过工具箱中的fkine 函数,通过输入相同角度,来判断机械臂模型所得出的齐次变换矩阵与利用正运动学函数所计算的变换矩阵是否相同,经验证,通过两种方式得出的变换矩阵相同。
基于建立的运动学连杆模型,并根据运动学分析得出的结果,对从臂各关节的活动范围各取30000 个离散点得出如图3 所示的机器人从臂末端工作区间图。由该图可得,机器人从臂工作空间类似于半球体,适用于患者手臂的活动范围。
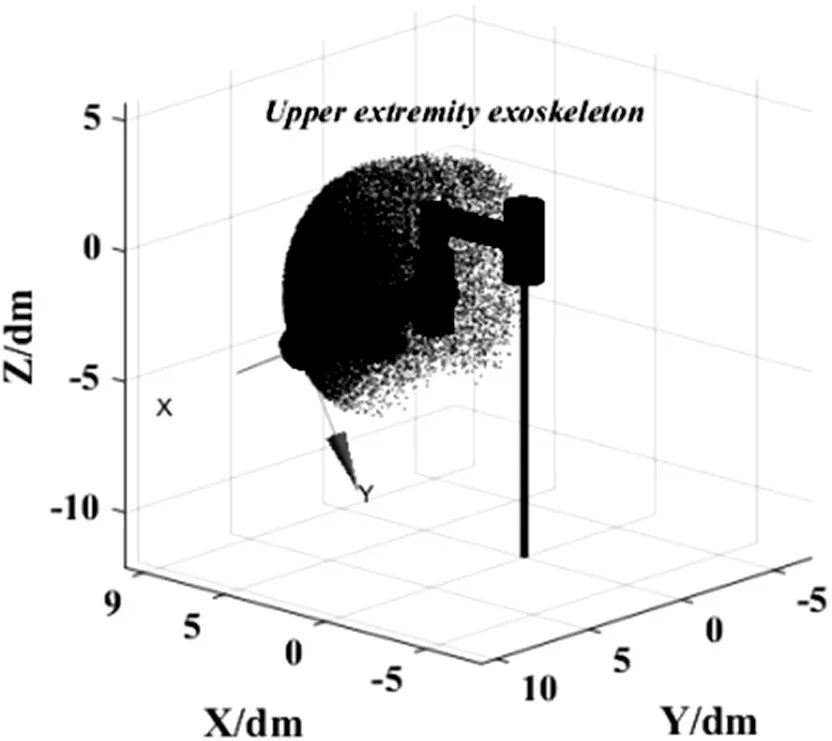
图3 外骨骼机器人从臂工作空间
2.2 主从空间映射
本文所研究的机器人为主从同型同构机器人,可利用主从笛卡尔空间控制[11]来实现对机器人从臂的运动控制,即:通过在笛卡尔坐标系下建立康复机器人主臂与从臂的映射关系,将主臂的工作空间映射至从臂的运动空间中,通过主臂的运动轨迹来得到从臂的运动轨迹。其主要实现过程:将主臂末端位姿利用映射算法一一对应至从臂末端位姿,通过逆运动学算法使从臂末端位姿逆推得到从臂各关节运动位姿,从而生成从臂运动轨迹,完成从臂跟随主臂运动,利用该控制方法可实现双臂末端位置一致的动作训练,如扩胸训练,从而完成人机协作运动。其主从映射分析如图4所示。
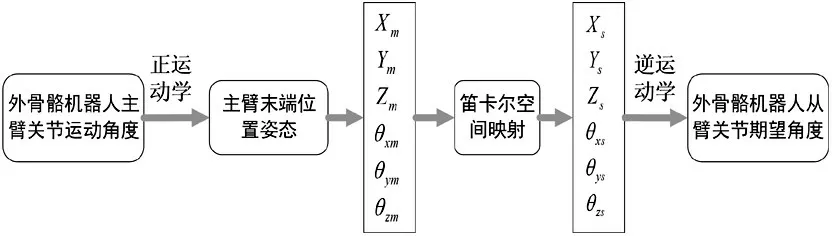
图4 主从式外骨骼机器人主从映射分析图
2.3 动力学建模
在对本文所设计的上肢康复机器人进行系统分析时,需对其进行系统结构简化,从而利于计算分析,为此,本文利用拉格朗日方程法建立上肢康复机器人的动力学模型[12],可忽略机器人系统内部干扰量,从而优化求解过程,来得到力或力矩与机械臂的角位移、角速度及角加速度的关系,其机械臂动力学模型可由二阶非线性微分方程描述:
其中,q ∈Rn为关节角位移量,M( q )∈Rn表示康复机器人从臂的对称正定惯性矩阵;表示离心力和哥氏力向量;G( q )∈Rm×n表示重力向量;F()为外部扰动,τ 表示操作臂控制力矩向量;τd为外界干扰。分别表示康复机器人从臂的角位移、角速度以及角加速度向量。
3 控制器设计
3.1 RBF整体控制原理
针对于上肢外骨骼康复机器人动力学控制器的设计,一般采用普通计算力矩控制策略,即结合机器人动力学模型将高度非线性的机器人动力学方程转换成等价的线性系统方程,进而消除关节之间的耦合作用,并应用线性控制理论实现闭环控制。定义康复机器人中的从臂角度跟踪误差为e(t)=qd-q,则普通计算力矩控制律[13]为
通过式⑶可得,计算力矩控制策略更加依赖于机器人动力学方程的精确性,但是在康复训练过程中机械臂会因为受到系统参数不确定性以及关节摩擦力等因素的影响,普通的计算力矩策略难以保持其轨迹跟踪精度,患者的康复训练效果也会受到影响。为此提出一种基于RBF 神经网络补偿的上肢康复机器人自适应控制方法,采用RBF 自适应神经网络对从臂动力学方程中的模型参数进行整体逼近,设计控制律对从臂驱动力矩进行补偿矫正,并在运动过程中根据轨迹的位置以及速度误差设置自适应律,来修正网络权值,从而提高系统的自适应性,进而达到从臂精准跟随主臂运动的目的。RBF控制系统原理框图如图5所示。
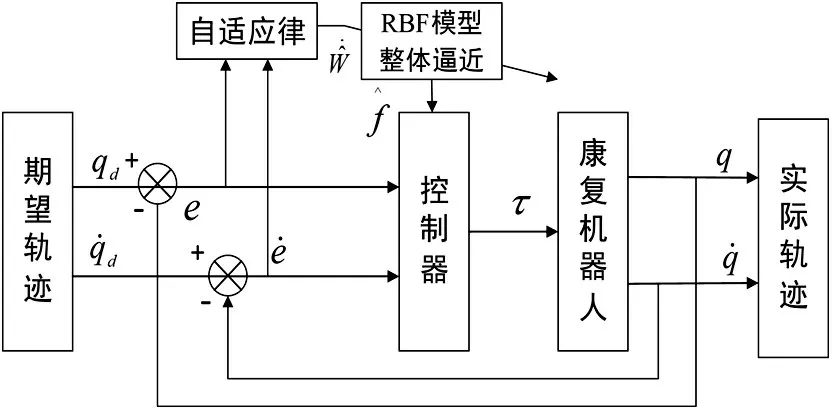
图5 RBF控制系统原理框图
3.2 RBF整体逼近模型
针对康复机器人从臂,设计滑模误差函数[14]为
其中,Λ=ΛT>0,则当r →0时,e →0。由式⑵、式⑷可得
根据RBF 神经网络的万能逼近原理,本文利用RBF 神经网络去逐步逼近不确定非线性函数f(x),其理想的网络算法为
其中,x 为RBF 神经网络的输入信号,x=[e eT],j 为网络隐含层第j个节点,h=[hj]T为网络的高斯基函数的输出,W*为网络的理想权值,ε为网络的逼近误差。而采用RBF神经网络去逼近不确定性项f(x),即
逼近误差可由式⑻、式⑼得
所以应设置合理的控制律在对模型不确定性逼近补偿的同时,还应设置相应鲁棒项来消除逼近误差的影响,从而得到合理稳定的控制力矩来驱动从臂沿主臂规划轨迹进行运动,从而完成人机协作运动。
3.3 控制律设计
根据上节分析,本文设计如下控制律为
其中,ν=-(εN+bd)sgn(r)为鲁棒项,满足用来克服RBF 神经网络的逼近误差,来保证系统稳定,其中‖ε‖≤εN,‖τd‖≤bd,Kν为固定参数。
将⑾式代入⑹式可得
RBF网络权值自适应律为
其中,μ=μT>0。
3.4 稳定性分析
定义Lyapunov函数来分析系统稳定性,即
对其求导可得
将式⑾代入式⒁可得
则根据以下条件:
⑴ 机器人动力学模型的斜对称特性得
4 仿真与试验
为了验证所提出的上肢康复机器人训练的合理性,本文则采用Simscape Multibody 工具箱来进行模型的快速搭建,具体步骤为:首先通过Solidworks来对上肢外骨骼康复机器人的从臂机械模型进行搭建,将关节坐标、惯性矩和约束添加到模型以生成urdf文件,将urdf 文件导入simulink/simscape 模块中进行可视化验证,其中外骨骼康复机器人的从臂可视化仿真模型如图6所示。
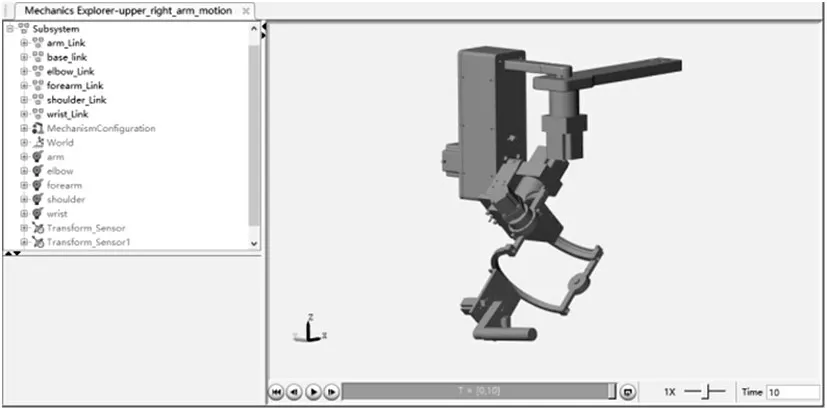
图6 上肢康复机器人从臂可视化仿真模型
而为了验证基于RBF 神经网络的控制器补偿的轨迹跟踪性能,运用Matlab/simulink 中的S-Function来对控制律进行描述,
首先应对RBF 神经网络的各项参数进行设置,网络输入取Z=[e],高斯函数的参数ci和bi分别设置为[-1.5 -1.0 -0.5 0 0.5 1.0 1.5]和10,网络的初始权值为0,并采用第2.2 节所提出的控制律⑾和自适应律⒀。
并以上述的Simscape 模型作为被控对象,以康复机器人的反复扩胸动作训练为例,由主臂进行扩胸训练,将运动轨迹映射至从臂,从臂带动患者患肢连续经历由收缩到伸展的状态,则可得从臂扩胸运动的可视化如图7所示。
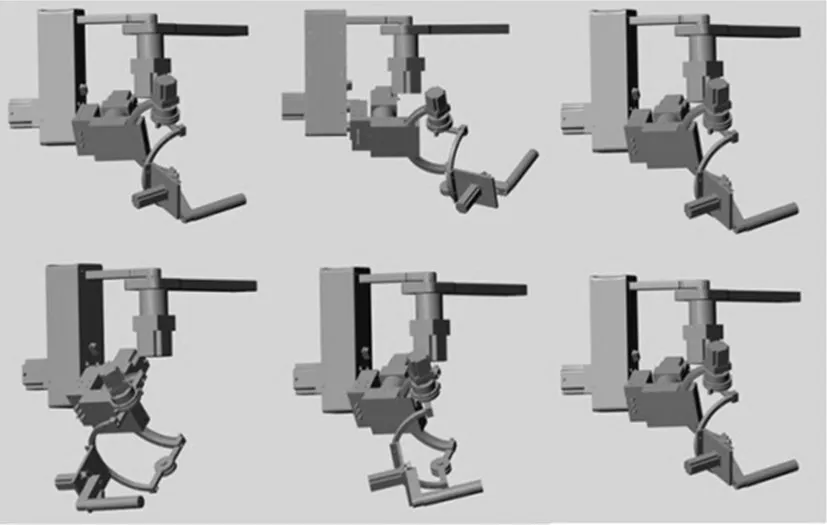
图7 上肢康复机器人从臂扩胸运动训练
而扩胸运动主要由肩关节外展/内收,肘关节伸/屈两种动作组合而成,故主要对这两种关节角度变化进行分析,通过应用本文所提的控制算法,并设置肩关节以及肘关节的外部扰动分别为τd1=-0.006sin(t),τd2==0.07sin(t),并与普通计算力矩控制算法进行对比,从而证明所提算法的有效性。其中扩胸运动中从臂肩关节以及肘关节的角度变化曲线以及跟随角度误差如图8,图9所示。
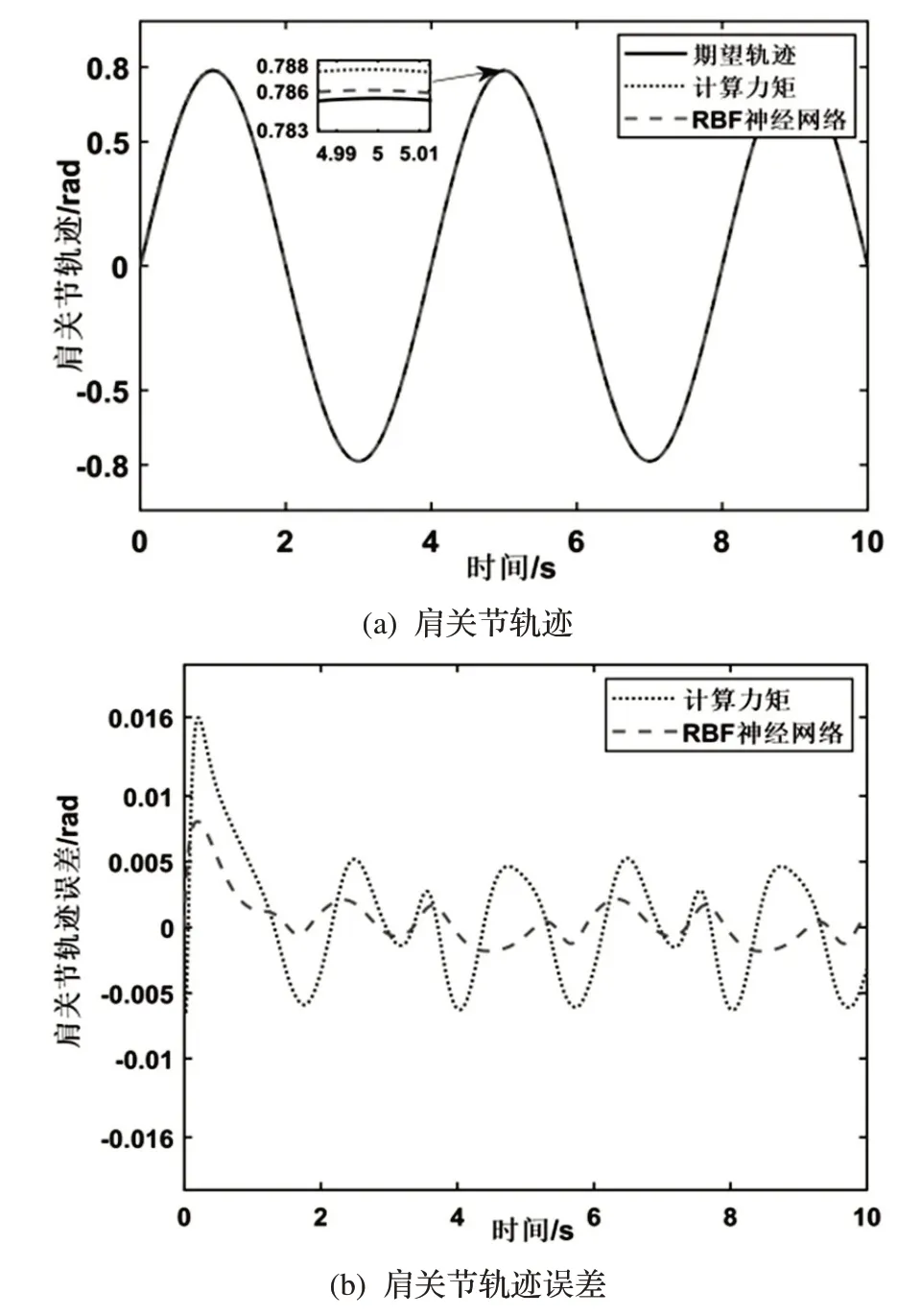
图8 肩关节轨迹跟踪及误差
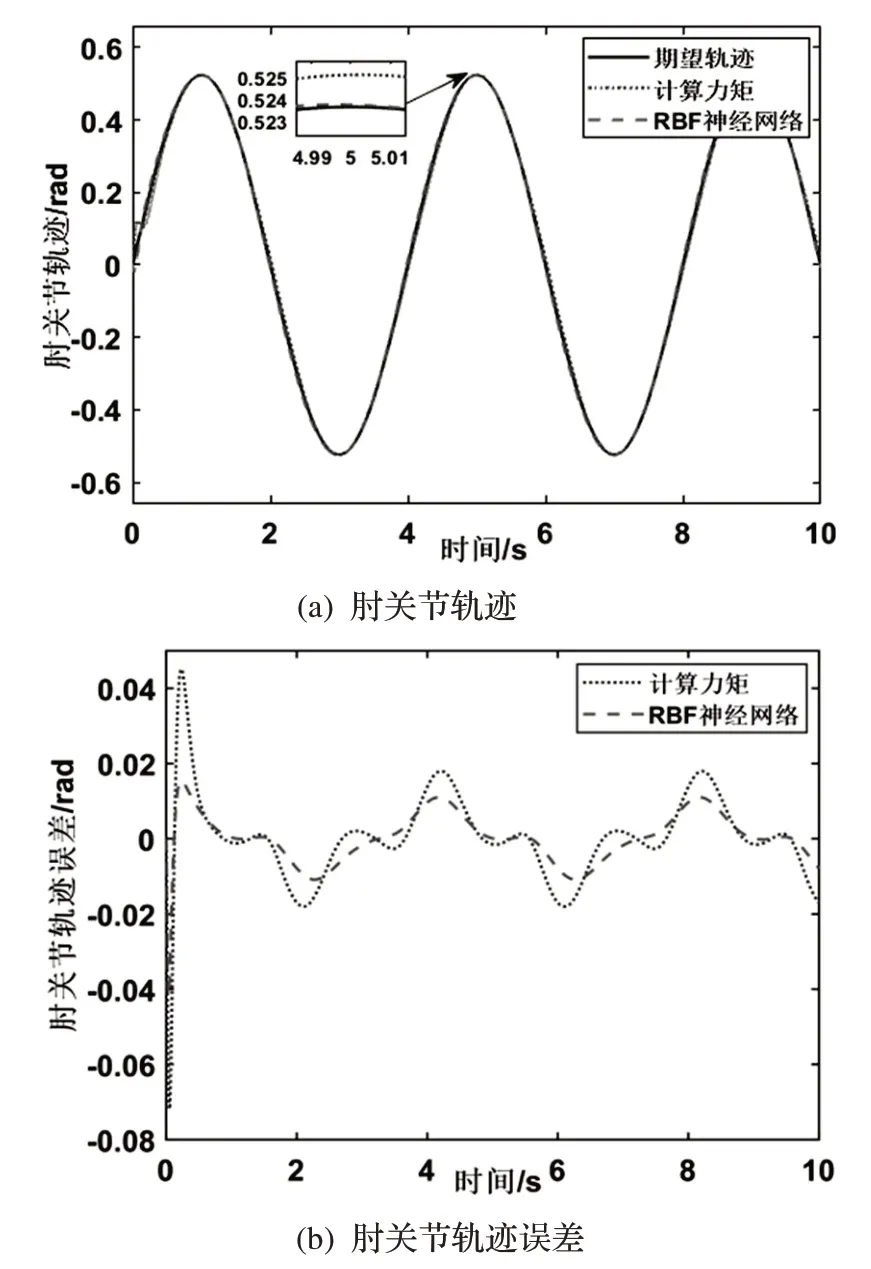
图9 肘关节轨迹跟踪及误差
结合上述两种控制策略所生成的仿真曲线对比可得如表2 所示的最大峰值稳态误差,在设置扰动的情况下,尽管传统的计算力矩控制策略也能够使康复机器人从臂对期望曲线实现跟踪,但达到稳态时关节轨迹误差较大。其中肩关节在系统稳定后轨迹跟踪的最大误差为0.00649rad,而肘关节的轨迹跟踪最大稳态误差为0.0185rad。

表2 最大峰值稳态误差
从加入RBF 神经网络补偿的控制策略的关节跟踪曲线可以看出,初始时刻关节跟踪误差波动减小,且达到稳定状态的时间有所加快,结合通过5s 处的局部放大图可看出稳态误差明显降低,并由表2 可得肩关节以及肘关节在系统稳定后轨迹跟踪的最大误差分别为0.00215rad 和0.0134rad,相较于传统的计算力矩控制,轨迹跟踪精度分别提升了66.87%和27.57%。则可说明,通过RBF 神经网络自适应控制器去补偿机器人的模型不确定性以及未知外扰,对系统的控制精度以及动态响应有着显著提高,可用于康复机器人的被动康复训练过程。
5 结论
本文以主从式上肢外骨骼康复机器人为研究平台,提出了一种基于RBF 神经网络补偿的自适应控制策略。通过主从映射算法得到从臂的期望轨迹,将轨迹误差作为RBF 神经网络的输入,不断逼近系统的不确定项,来优化从臂的输入力矩,并用Lyapunov 理论证明系统稳定性。通过仿真结果能够得出该控制方法在轨迹跟踪方面,相较于普通计算力矩控制,其精度和稳定性方面具有更好的性能,对模型不确定性和完全未知的外部环境干扰具有很强的鲁棒性,从而提高了主臂与从臂的协调能力,来提升患者患肢的恢复训练效果,能够更好地实现人机协作。
猜你喜欢
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
测控技术(2018年6期)2018-11-25
中国自行车(2018年4期)2018-05-26
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
中国民族医药杂志(2016年7期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
实用手外科杂志(2015年2期)2015-08-28
