
复杂机电液设备电气系统故障诊断实验研究
2023-10-23 04:01:38韩影高传磊
环境技术 2023年8期
韩影,高传磊
(1.咸阳职业技术学院 机电学院,西安 712000;2.彩虹集团特种玻璃有限公司,邵阳 422000)
引言
随着城市化的高速发展,缓解交通拥挤压力进行了大量的城市化交通建设,盾构机是不可或缺的地铁掘进隧道的大型机械设备[1]。盾构机是一种机械、液压以及电气集成化的大型重载专业化设备,其长期工作在复杂多样的施工环境,功能的稳定性和维护性面临巨大的挑战,尤其是复杂的电液系统,故障频繁和故障原因复杂,极易导致电液控制系统的失效,从而影响盾构机工作的稳定性,面对这一重型复杂的机电液设备,需要有完善的故障诊断机制和策略,才能快速的识别出潜在的故障状态,通过故障响应分级的进行盾构机系统保护[2]。
复杂机电液设备的故障诊断难点在于其系统结构复杂、部件间的耦合性强,故障触发后故障响应较为复杂,因此复杂机电液设备故障诊断一直是研究的重点和热点,在长期的持续研究中,取得了重大的研究成果,其中,华北水利水电大学的郝用兴[3]为了在线监控盾构机的工作状态和故障状态,提出使用加权因子与传统费歇尔判别法相结合的加权费歇尔判别法,运用仿真故障数据得到每一类故障的加权向量,建立VWFDA模型对盾构机进行故障诊断;华南理工大学的史步海[4]以盾构机为研究对象,针对盾构机故障诊断过程中各类故障数据集存在类别不平衡的问题,采用基于SMOTE算法和Bagging算法的故障诊断分类器对盾构机数据进行故障诊断;上海大学的樊彬彬[5]针对盾构机的故障诊断,构建了基于故障树模型的综合推理机,结合实时参数和动态规则的实时诊断推理机能够快速的识别盾构机的系统故障,提高盾构机的故障诊断能力。本文针对复杂机电液设备的盾构机电液系统进行精准故障诊断,通过设计相关组件故障诊断事件处理拓扑结构,采用故障特征值离群诊断方法裁剪电气组件故障诊断处理过程,并通过集成化测试环境验证故障诊断方法的可行性和稳定性。
1 盾构机电液系统结构
高复杂度的盾构机是多部件组成的一种机电液特征强耦合的综合大型设备,主要由刀盘/刀盘驱动控制系统、盾构机架、输送机、推进液压油缸、电液驱动系统、复合制动系统以及电气/推进系统附件装置,如图1所示[6]。

图1 复杂盾构机系统结构
2 故障事件拓扑结构
复杂机电液设备在周期性监测故障发生的状态,在部件发生故障后,针对不同的故障确认状态进行等级划定,尤其是严重度高的故障,一旦确认故障已发生,需要快速的进行故障响应[7]。因此需要根据复杂机电液设备的部件结构和电气部件的特性,设计可以承载高负荷高算力下的盾构机故障监测和故障响应,整体的故障事件处理包含了故障监测使能条件、故障确认、故障恢复、故障特征集群、故障响应分级等,在故障监测的过程中,实时的对故障诊断使能条件进行判断,只有在故障诊断使能条件满足的状态下才能进行相应故障诊断项的监测。
针对不同的部件故障诊断,分为静态故障诊断、动态故障诊断,其中,故障诊断使能条件在部件上电或者工作时就自动的静态满足,待故障监测条件达到后确认故障;故障使能条件在一定的条件或耦合相关部件后满足,瞬态故障经过故障诊断滤波后确认成为动态故障;当故障确认后经过故障特征集群化优化后,会将低效率低故障精度以及强耦合故障特征进行裁剪,随后故障事件处理模块划分相应的故障等级,通过故障等级进行故障响应机制的执行,如图2所示。

图2 盾构机故障事件处理拓扑结构
盾构机多部件的故障诊断需要利用故障特征离群进行解耦,在故障诊断过程中,需要对盾构机的电液信号进行优化处理,通过阈值[Sp0,Sp1]判断电液信号的诊断有效性,反馈相关电液信号的瞬时有效性标志、概要有效性标志、有效性标志[St2,Sp3,Sp4],用于部件的故障诊断使能条件,返回值[Ze0,Ze1]用于表征电液信号处理的状态;在故障特征离群优化处理阶段,将电液系统故障特征[Dk0,Dk1,Dk2]以及[Ds0,Ds1,Ds2]按照定好的离群策略进行离群处理即可;故障诊断阶段进行故障的确认和恢复[Ft1,Ft2],随后进行部件的故障仲裁和故障事件处理,如图3所示。
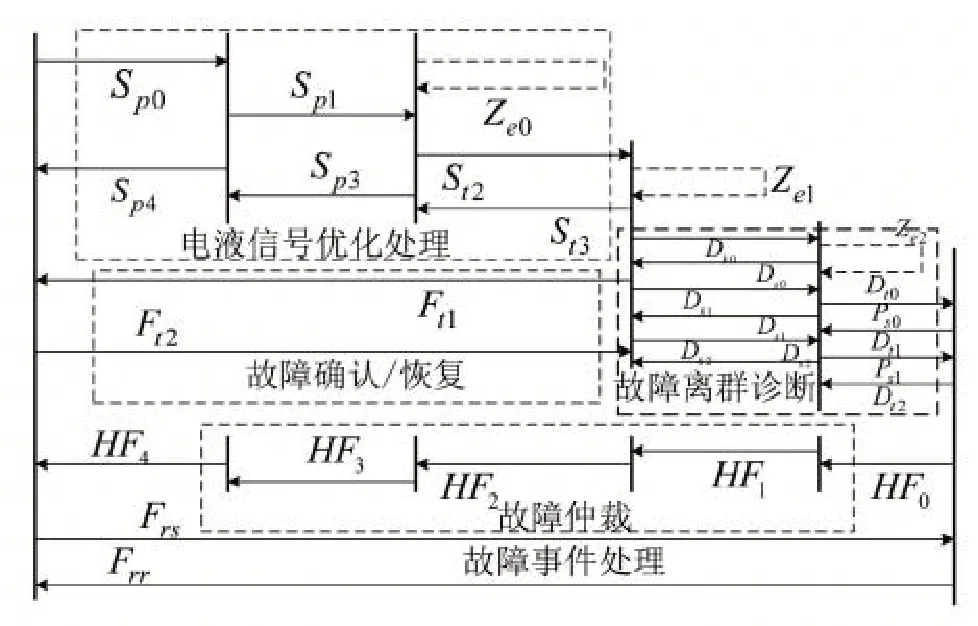
图3 盾构机故障诊断时序
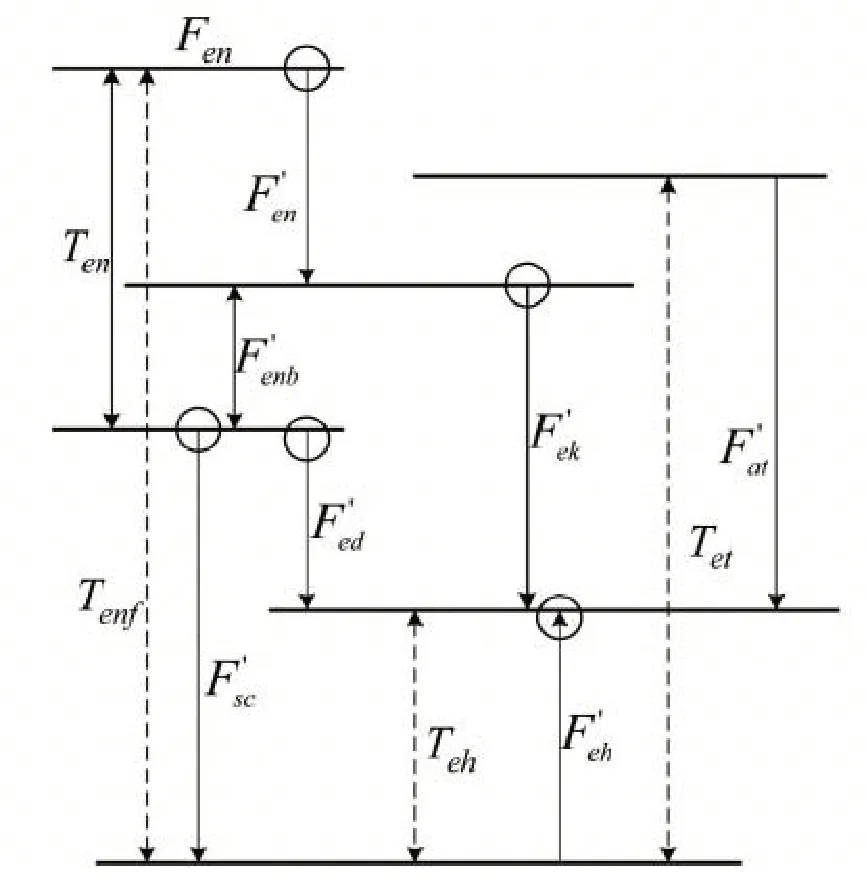
图4 盾构机故障确认防抖处理
3 故障诊断方法
盾构机多部件的故障诊断是在一个多变多耦合的故障监测过程,电液部件故障监测的瞬时故障结果是突变的,不能立刻作为故障结果,需要对瞬态的故障结果进行滤波防抖处理,将最后的故障结果作为确认故障,进行故障特征离群处理后执行故障响应。本文设计的故障滤波处理方法是基于时间的持续型故障防抖处理方法[8]。
基于时间的持续型故障防抖处理关注的是故障使能Fen、故障重置、瞬态故障、确认故障以及故障防抖处理的时间Ten,Tenf,Teh,Tet,在设计其故障确认和故障恢复过程的防抖时,故障诊断使能优先级最高。故障使能条件满足=1的状态下,电液系统故障监测瞬时状态为故障状态后,在故障确认时间内一直持续为故障状态且无故障重置命令,经过持续的防抖计数,计数达到故障确认计数值后故障可确认;若在故障确认过程中,故障诊断使能条件不满足=0,防抖计数需要停止计数,故障状态保持,直到故障使能条件重新满足后,计数开始重新计数;在故障重置和故障使能条件满足的状态下,只要故障重置置位后=1,故障可以直接清除=0,其防抖处理具体实现描述如下图所示。
盾构机故障诊断的特征值是一个融合了大量复杂信息的故障信息集[9],利用故障特征离群处理方法,将确认故障突变、故障信息准确度下降率大、部件诊断效率下降的故障监测参数进行分集处理,制定多向的故障离群判定准则后,将故障特征模糊的故障确认状态进行剥离,如图5所示,制定故障特征离群区域FA和FB,其中,FA故障特征离群区在[Fet1,Fet2,Fet3]故障监测周期内评估的确认故障质效[Qt1,Qt2,Qt3,Qt4]判定结果较为低,同理FB故障特征离群区的故障诊断质效非常高,但是其故障诊断的效率较为低下且故障监测响应过慢,具体的如图5所示。

图5 盾构机故障特征离群
4 故障诊断实验
对复杂机电液盾构机故障特征离群故障诊断方法进行试验验证,利用盾构机工况模拟测试台架构建了盾构机电液系统故障诊断集成化实验环境,可以通过特定的标定工具进行在线实时参数标定[10],盾构机模拟台架和电气控制柜的集成化环境可以对电气系统和附件装置进行可变参数的模拟,在一个完整的故障模拟周期内进行故障诊断实验,其中,盾构机故障诊断集成化实验环境和实时试验数据如图6~8所示。

图6 盾构机故障诊断集成化实验环境
对盾构机主要的电液驱动节点和电气附件进行了故障诊断实验,采用真实故障注入的方法,其中,图7是对盾构机不同的电液节点进行故障诊断精度的试验验证,在一个完整的故障注入周期内,采用故障特征离群故障诊断方法后,各个电液节点的故障诊断精度均达到了90 %以上,能够很好的精确的对相关的故障进行监测;图8是故障响应的结果,利用所设计的盾构机故障事件处理拓扑结构后,在不同的带载状态下,故障发生后会在相应的时间触发故障响应机制,待故障恢复后,故障响应机制应该退出,此时,相应的功率器件应该在满足带载状态下的功率需求,从图中可以看出,盾构机故障恢复后,掘进辅助驱动电机的功率快速的提升,动态响应极为迅速,保证了盾构机在负荷状态下的功率需求。

图7 盾构机电液节点故障诊断精度

图8 盾构机推进辅助驱动电机功率
5 结束语
复杂机电液盾构机掘进过程中极易出现各种故障,针对复杂多变工况下盾构机的故障诊断,在盾构机的系统机构基础上,利用设计好的故障事件处理拓扑结构进行故障事件管理,采用故障特征值离群诊断方法进行电气系统的故障监测,最后通过分析集成化故障诊断实验结果得出所设计的盾构机故障诊断方法能够有效的提升其诊断精度和故障诊断系统的稳定性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
化工管理(2021年7期)2021-05-13 00:46:16
装备制造技术(2020年3期)2020-12-25 05:22:38
专用汽车(2016年4期)2016-03-01 04:14:27
中国房地产业(2016年9期)2016-03-01 01:26:47
中国房地产业(2016年9期)2016-03-01 01:26:36
工程建设与设计(2016年4期)2016-02-27 10:51:09
作文评点报·低幼版(2015年5期)2015-05-30 10:48:04
西安交通大学学报(2014年8期)2014-04-16 05:07:06
中国质量与标准导报(2014年7期)2014-02-28 22:24:36
