
月船-3成功着陆月球 印登月雄心终获实现
2023-10-18 11:44张扬眉蒋一雄
国际太空 2023年9期
张扬眉 蒋一雄
(1 北京空间科技信息研究所 2 中国空间技术研究院)
2023年8月23日20:34,印度月船-3(Chandrayaan-3)探测器成功在月球南纬69.37°、东经32.35°附近区域着陆,印度成为继苏联、美国和中国之后,第四个在月球表面成功着陆的国家。在历经四年前月船-2着陆失败的挫折后,月船-3着陆终获成功,印度自此进入“月球着陆俱乐部”,这极大地增强了印度人民的自豪感和自信心,对提升印度的国家影响力具有重要意义,印度总理莫迪称这是“新印度胜利的呐喊”。月船-3着陆月球后,印度空间研究组织(ISRO)通过社交媒体宣布,智慧号(Pragyan)月球车从着陆器中驶出,探测器所有系统正常。9月3日,ISRO宣布智慧号月球车已完成主要任务,行驶距离超过100m,将进入休眠状态并等待下一次唤醒。

1 基本情况
月船-3是印度第三次月球探测任务,于2023年7月14日搭乘“运载火箭M3”(LVM3)(以前被称为GSLV-MK3)发射,任务目标是演示验证月球表面软着陆技术与月球车巡视技术,并进行原位科学探测和实验,研究月球土壤和水冰等。
月船-3探测器由ISRO研制,总质量约3900kg。探测器由推进模块(PM)和月球模块(LM)组成。其中,月球模块包括一个着陆器和一辆月球车。月船-3并未像月船-2那样包含轨道器,而是采用一个推进模块替代轨道器的功能,并可用于中继通信。

月船-3探测器
推进模块:箱状结构,基于I-3K改进版平台,质量2145.01kg,干质量448.62kg,推进剂质量1696.39kg,功率758W,一侧安装有一个大型太阳能电池阵,顶部有一个大圆柱体以及模块间适配器锥体,主发动机的喷嘴位于底部。推进采用MMH和MON-3双组元推进系统,通信采用S频段转发器。推进模块主要用于与着陆器和月球车的中继通信,此外还携带“宜居行星地球的光谱极性测量”(SHAPE)实验装置,从月球轨道对地球进行光谱和偏振测量,计划工作寿命为3~6个月。
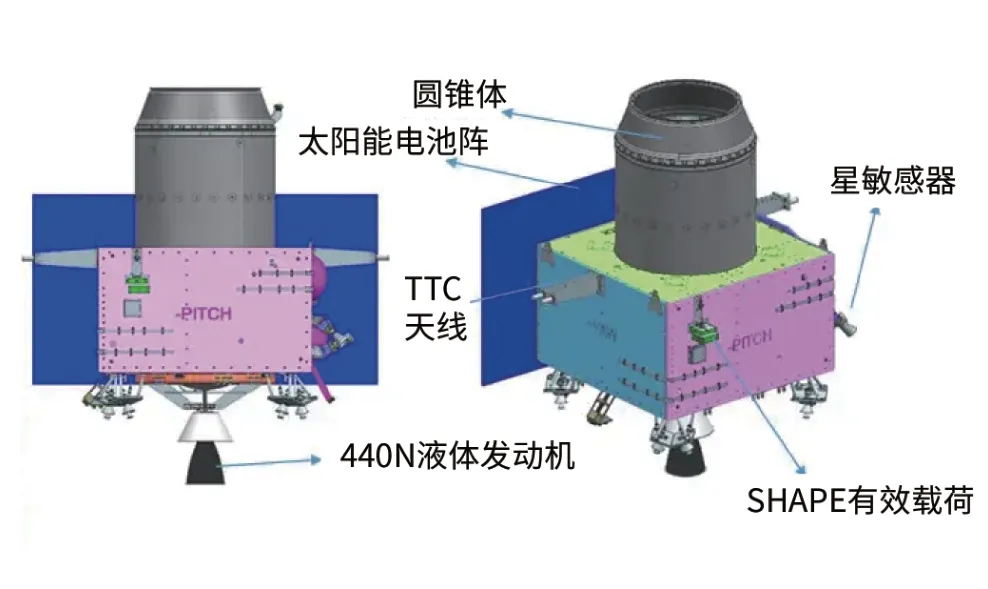
推进模块构型
着陆器:被命名为“维克拉姆”(Vikram),箱状结构,尺寸为2m×2m×1.166m,质量为1749.86kg(包括月球车质量26kg),计划工作寿命为1个月昼(14个地球日)。着陆器装有4条着陆腿,侧面安装有功率为738W的太阳能电池阵。反作用轮用于巡航阶段的控制姿态;推力由MMH和MON-3双组元系统提供,包括4台800N节流主发动机和8台58N姿态调节推力器。着陆器可与月船-2轨道器、月船-3月球车、推进模块和印度深空网(IDSN)通信。着陆器携带3种有效载荷,包括钱德拉表面热物理实验装置(ChaSTE),月球地震活动仪(ILSA),绕月高敏感电离层和大气的无线电分析-朗缪尔探测器(RAMBHA-LP),此外还安装了一个由美国国家航空航天局(NASA)提供的用于月球激光测距的无源激光反射器阵列(LRA)。
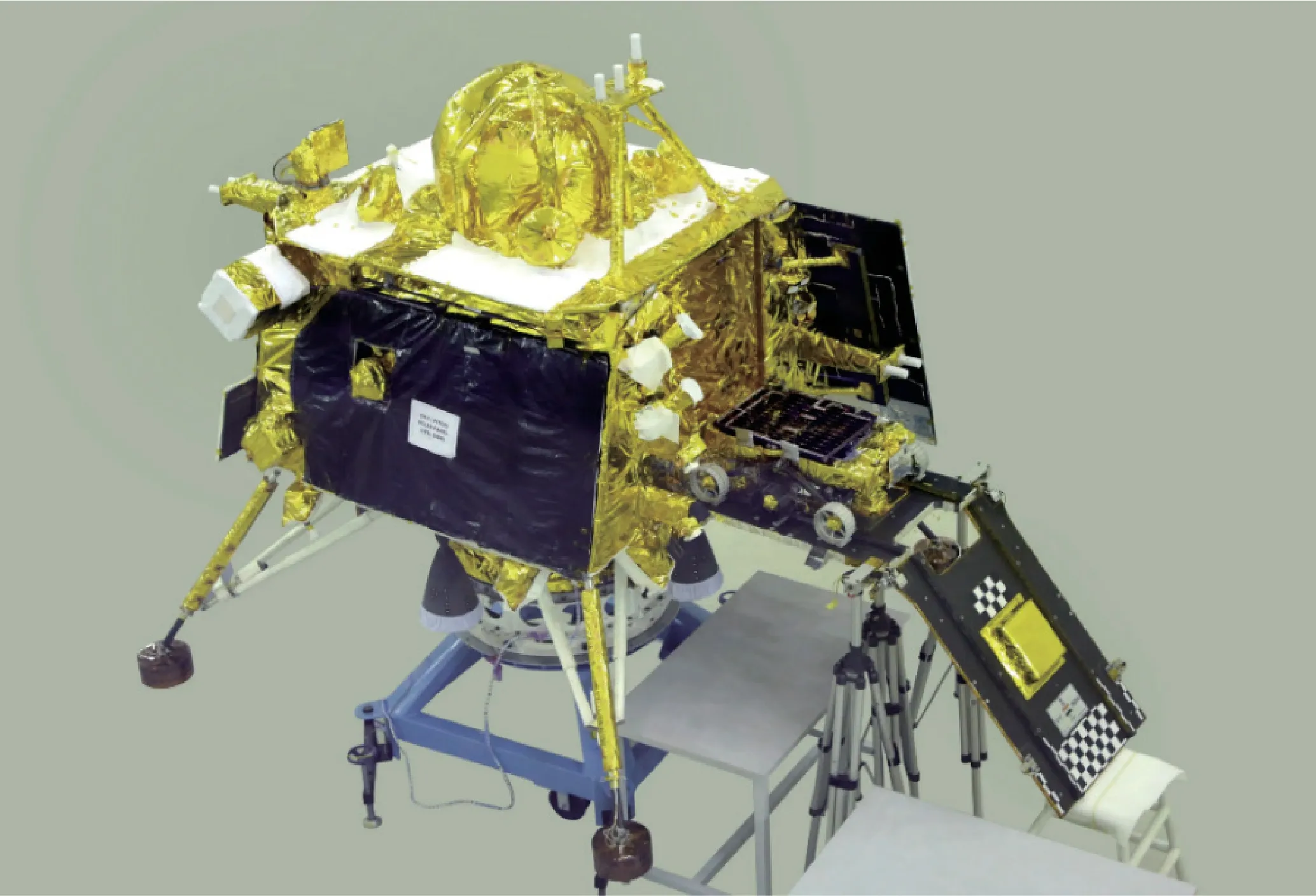
月船-3着陆器和月球车
月球车:被命名为智慧号,尺寸为917mm×750mm×397mm,质量为26kg,安装在一个六轮摇臂式轮驱动组件上,计划工作寿命为1个月昼(14个地球日)。月球车装有一个可产生50W电力的太阳能电池阵以及导航相机,通过Rx/Tx天线与着陆器直接通信。月球车携带2种有效载荷,用于研究当地的表面元素组成,即阿尔法粒子X射线光谱仪(APXS)和激光诱导分解光谱仪(LIBS)。
月船-3的运行情况通过ISRO遥测、跟踪与指令网(ISTRAC)的任务运行综合站(MOX)以及位于印度班加罗尔的印度深空网持续监测。此外,欧洲航天局(ESA)和美国喷气推进实验室(JPL)的深空天线也为月船-3提供跟踪监测支持。
2 任务实施过程
计划飞行过程
月船-3由LVM3运载火箭从萨迪什·达万航天中心发射后,计划在近地点实施5次变轨机动,随后进入月球转移轨道,共历经45天约384000km的飞行后抵达月球。推进模块将着陆器/月球车送入100km的圆形月球极轨道并与其分离,然后着陆器与月球车一起在月球南极附近的“曼齐尼U”环形山(Manzinus U crater)着陆,即南纬69.37°、东经32.35°附近(着陆范围为4km×2.5km),计划着陆速度为垂直方向低于2m/s,水平方向低于0.5m/s。推进模块将留在月球轨道上,用于地月之间的中继通信。此前印度发射的月船-2轨道器也可作为备用中继器。

月船-3飞行过程
实际飞行情况
月船-3于7月14日发射升空后,与运载火箭成功分离,并进入36306km×138km的初始轨道,相比原计划的36500km×170km椭圆停泊轨道(EPO)有所偏差。之后,月船-3经过5次地球轨道变轨、1次地月转移变轨、7次月球轨道变轨后,进入了134km×25km的落月前轨道。在此期间,月球模块成功与推进模块分离。8月21日,月球模块与月船-2轨道器建立通信。8月23日,地面任务团队启动“自动着陆序列”(ALS)模式后,月球模块抵达预定位置,启动可节流发动机,从距离月球表面约30km处开始受控下降。在整个着陆过程中,探测器的方向从水平调整到垂直,速度从最初的1.68km/s降至几乎为零,探测器着陆月面后传回遥测数据,月船-3任务着陆成功。
3 任务特点分析
月船-3成为当前最靠近月球南极的探测器
目前科学界对于月球的极区并没有严格的定义。如果比照地球的划分方法,是指南北纬66.5°以上地区。实际上,考虑月球白道与黄道的夹角,真正可能存在永久阴影坑、具有“极夜极昼”现象的地区,应该在南北纬86°以上。
印度宣称月船-3任务是全球首次月球南极着陆。由于月球南极的阴影区远大于月球北极,寻找到水冰的可能性更大,因此月球南极一直是月球探测活动重点关注的区域。目前已有月球轨道器对月球南极地区进行过遥感探测,包括美国的“月球勘察轨道器”(LRO)、日本“月女神”(SELENE)等,并探测到月球南极富含水冰。本次任务的成功,极大地提升了印度的国际影响力,对印度树立航天大国形象具有重大政治意义。
月船-3的成功建立于月船-2着陆失败的经验教训之上
可以说,此次月船-3着陆的成功很大程度上是建立在月船-2着陆失败的经验教训之上,这两次任务的科学目标和工程目标、探测器系统组成、科学有效载荷等几乎相同,只是月船-3用更为简化的推进模块替代了月船-2轨道器的中继功能,减少了科学载荷,并对月球模块进行了一些性能上的改良。
为了增加本次任务成功着陆的几率,印度基于月船-2由于软件故障导致姿态失控从而着陆失败的经验教训,对月船-3的设计进行了一系列改进,包括改进软件以适应故障;采用新仪器来精确计算探测器的下降速度;加固着陆支腿以应对更高的着陆速度;安装数台新的传感器以增强导航相关的测量数据来提高冗余;采用更先进的能源和通信系统;换装光电转换效率更高的太阳能电池;增加燃料加注量;制定故障安全措施确保出现某些意外情况时也可以成功着陆等。此外,相比月船-2任务500m×500m的着陆范围,将月船-3的着陆范围扩宽至4km×2.5km。ISRO主席索玛纳特(Somanath)称,探测器在正常条件下只会瞄准一个特定的着陆点。但当探测器表现不佳时,则可以降落在着陆范围内的任何地点。由于探测器携带了比月船-2更多的燃料,也可以在必要时前往另一个着陆点。
月船-3着陆器的受控下降装置由月船-2的5台800N发动机缩减至4台,取消了着陆器底板中心的一台800N固定推力发动机。ISRO认为,底板中心的那台发动机原本主要用于吹除着陆点的月尘,该发动机的存在意味着陆程序需要多一项操作,而且这项操作发生在决定着陆任务成败的最后关键阶段,会降低探测器的设计可靠性,同时对着陆任务的成功实施帮助甚微,甚至会降低成功率。因此经过权衡,ISRO取消了这台吹除月尘的专用发动机。
注重培育自力更生的独立研发能力
从导航卫星系统——“印度导航星座”(NavIC)到包括“月船”系列、“曼加里安”(Mangalyaan)等深空探测任务,再到已发射的“阿迪蒂亚-L1”(Aditya-L1)太阳探测任务和“天空飞船”(Gaganyaan)载人任务,印度一直非常注重培育独立研发和发射任务的能力。月船-3任务中的推进模块、着陆器以及月球车都由印度独立研发,旨在为印度未来的行星探测任务研发和演示验证新型技术。通过本次任务,印度有望掌握月球表面软着陆、巡视探测、原位分析和实验的技术。
此外,由于外界采购限制等多种因素,本次任务还采用了印度国产的激光多普勒测速计(LDV),而不是原先计划进口的仪器。
通过广泛宣传提升公众热情,积极融入国际合作
印度对本次任务进行了广泛的宣传活动,包括与月球村协会共同主办全球推广活动,举行月船-3任务相关的全球视频竞赛、网络论坛,全球网络直播月船-3着陆全过程等,希望以此提高ISRO的月球任务在全球范围内的影响力,并推动进一步的国际合作。印度通过大力的科普宣传和氛围营造,吸引了全球尤其是印度本国对本次任务的密切关注。由于对此次着陆的预期很高,印度报纸和新闻频道的头条都启动了倒计时。全国各地的礼拜场所都举行了祈祷活动,学生挥舞着印度国旗观看着陆直播。孩子们聚集在被印度教徒视为神圣象征的恒河岸边,为月船-3的安全着陆祈祷。
此前,印度还于2023年6月签署《阿尔忒弥斯协定》(Artemis Accords),成为第27个签署国,此举也标志着美印太空合作的进一步加强。ISRO还几乎同期与法国国家空间研究中心(CNES)、阿里安航天公司(Arianespace)、挪威康斯伯格卫星服务公司(KSAT)举行访问和会谈,商讨潜在的航天合作领域。可以预见,印度未来将更为积极地融入深空探索活动国际合作。
猜你喜欢
军事文摘(2022年12期)2022-07-13
飞碟探索(2022年1期)2022-03-12
军事文摘(2021年18期)2021-12-02
工业工程设计(2021年3期)2021-06-30
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
太空探索(2016年9期)2016-07-12
中学科技(2015年7期)2015-07-03
世界科学(2014年2期)2014-02-28
