
星地SLR和星间链路的BDS-3卫星精密定轨
2023-10-13 12:23曲伟菁徐君毅孙淑贤周善石杨宇飞胡小工
测绘学报 2023年9期
曲伟菁,黄 勇,2,3,4,徐君毅,孙淑贤,周善石,2,杨宇飞,何 冰,胡小工,2,3
1. 中国科学院上海天文台,上海 200030; 2. 上海市空间导航与定位技术重点实验室, 上海 200030; 3. 中国科学院行星科学重点实验室, 上海 200030; 4. 中国科学院大学天文与空间科学学院, 北京 100049; 5. 北京卫星导航中心,北京 100092; 6. 浙江水利水电学院,浙江 杭州 310018
2020年7月31日,BDS向全球及中国周边地区开始提供7种类型服务[1]。BDS-3星座由地球同步轨道卫星(GEO)、倾斜地球同步轨道卫星(IGSO)和中轨道卫星(MEO)3类卫星组成。与其他GNSS导航系统不同,BDS-3地面站主要分布于中国境内,当IGSO卫星和MEO卫星运动到境外时,地面站对卫星的监测中断,观测数据缺失,影响卫星在境外时的轨道和钟差精度,进而影响系统服务性能。BDS-3星上搭载星间链路(inter-satellite link,ISL)设备,可利用星间测距技术弥补观测数据的不足,分离卫星相对钟差和相对几何距离解耦卫星轨道和钟差,再把星地距离作为观测量结合地面测量数据进行星地星间联合定轨[2-4]。
文献[5]对BDS-3基本导航服务性能进行评估的结果表明,在有星间链路数据情况下,广播星历用户距离误差优于0.1 m,广播钟差参数预报精度优于1.5 ns,空间信号精度优于0.6 m。文献[6]利用国内6个地面站的星地伪距相位数据对MEO卫星精密定轨,加入星间链路前后轨道重叠径向精度分别约为0.18和0.025 m,三维位置精度分别约为0.85和0.12 m。文献[7]采用BDS地面站伪距相位数据和星间链路数据对BDS卫星进行精密定轨的结果表明,区域站加入星间链路后BDS-3卫星轨道重叠弧段径向、法向、切向和三维精度分别提升约90%、80%、60%和74%,区域站24 h轨道预报的三维位置精度提升85%。文献[8]采用L波段星地数据对BDS-3试验星进行精密定轨,卫星轨道径向精度优于0.50 m,L波段数据与星间链路测量数据联合定轨,卫星轨道重叠弧段径向精度提升优于0.06 m。各文献分析结果表明,与仅采用星地L波段伪距相位数据的精密定轨精度相比,加入星间链路后,卫星精密定轨和轨道预报精度均明显提升。
人卫激光测距(satellite laser ranging,SLR)通过精确测定激光脉冲从地面观测点到装有反射器卫星的往返时间间隔,算出地面观测站至卫星的距离。基于其观测原理,SLR测距精度可达1 cm,并且SLR技术不受载波相位模糊度、钟差等影响,应用于大地测量的SLR卫星多为球形,面积质量比小,与非重力相关的轨道扰动小。SLR作为一种独立于GNSS观测技术的测量手段,在卫星定轨研究中发挥着重要作用,一方面由于SLR观测对卫星的径向位置最敏感,可以利用SLR对卫星定轨精度进行校验[7-9],另一方面采用单SLR数据对卫星精密定轨,BDS卫星定轨精度约为米级[10-11]。文献[12]采用2014—2017年期间ILRS组织的3次SLR跟踪GNSS卫星的加强观测数据,对各GNSS系统卫星精密定轨,在SLR台站和观测数据足够多的情况下,MEO卫星精度可以达到厘米级。由于SLR地面观测台站较少,分布不均匀及观测数据量少等原因,与GNSS技术相比,采用单SLR数据的卫星定轨精度较差,SLR联合GNSS则有助于提高轨道精度[13-16]。由于SLR技术的特点,其在地球参考框架、尺度、地心运动和地球重力场的研究中也具有独有的优势[17-20],目前国际大地参考框架(ITRF2014)的尺度和地心通过SLR对LAGEOS和ETALON卫星的观测得到[21]。国内外学者已经开展采用SLR联合GNSS技术的研究[19-24],但是GNSS技术在数据处理时会受到天线相位中心、太阳辐射压和模糊度等因素的影响[25-27]。
在卫星导航领域,卫星精密定轨在天球参考框架处理,而地面监测站和用户均在地球参考框架中,因此卫星导航系统运行过程中需要实时进行天球参考框架和地球参考框架的转换,而地球自转参数(ERP)是两种框架相互转换必不可少的参数。IGS中心提供的极移精度约为0.01 mas。文献[28]利用中国陆态网GPS伪距相位数据解算极移X和Y分量精度分别约为0.3和0.4 mas,日长变化精度为0.112 ms。利用MGEX网BDS伪距相位数据解算极移精度约为1 mas,日长变化精度为0.055 ms。文献[29]对Galileo下一代系统Kepler的论证中,开展基于激光星间链路的EOP处理方法设计和精度仿真论证工作,只采用MEO卫星星地GNSS观测数据解算极移精度约为0.01 mas,加入星间链路之后可显著提高EOP估计精度提高约50%。文献[30]采用全球激光站LAGEOS卫星的观测数据解算极移X和Y分量精度约为0.4 mas,日长变化为0.03 ms,采用中国区域SLR台站观测数据解算X和Y分量精度优于5 mas,日长变化为0.32 ms。
由于星间链路测量体制,仅利用卫星星间测距数据进行卫星定轨处理时,导航星座存在整体旋转的问题[31],如果加入地面锚固站与星座之间的测距数据,可以避免此问题。与星地星间链路联合定轨相比,SLR与星间链路联合定轨则更有利于开展地球框架、地心、尺度等方面的研究,但是SLR台站分布不均匀,数据量少,会对卫星轨道精度产生一定的影响。本文开展BDS卫星的SLR和星间链路实测数据进行联合定轨的研究,首先对采用的卫星、观测数据及定轨策略进行介绍,然后评估定轨精度、不同轨道类型卫星建链对轨道精度影响,并对解算ERP精度进行评估,为卫星轨道确定、参考框架的实现及大地测量参数的估计等提供技术支撑。
1 观测数据和定轨策略
1.1 BDS卫星和观测数据
本文选取11颗BDS-3卫星(表1),2颗IGSO卫星,1颗GEO卫星和8颗MEO卫星,其中MEO卫星C20至C22,C28至C30,C45至C46分别位于3个不同的轨道面。11颗卫星共形成49条链路。
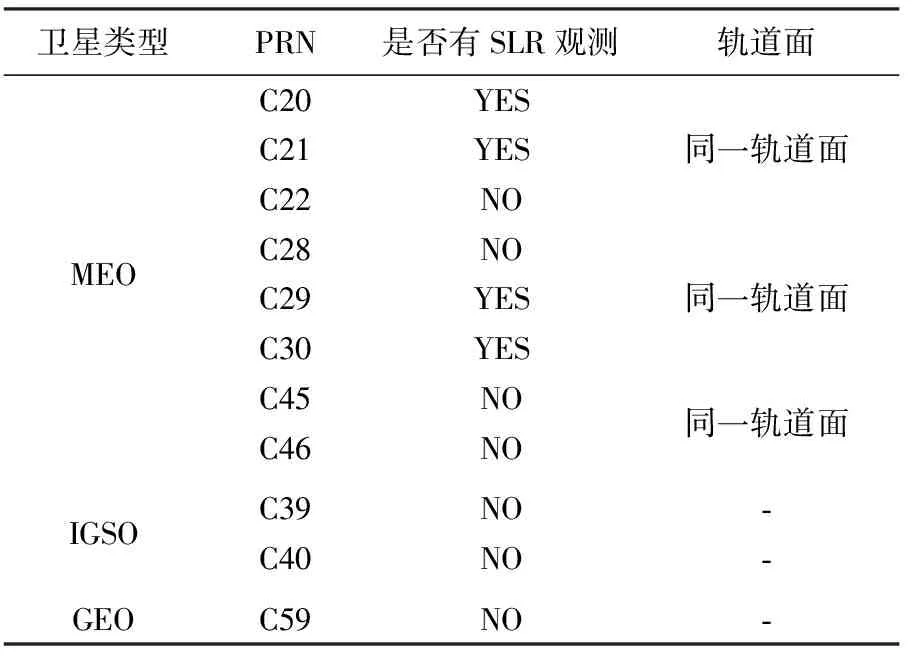
表1 BDS-3卫星
从2012年开始,ILRS协调全球激光测站对9颗BDS进行观测,其中包括BDS-3的C29、C21、C20和C30 4颗MEO卫星,卫星的质心改正(卫星本体坐标系)采用北斗官方发布数值[32](表2)。
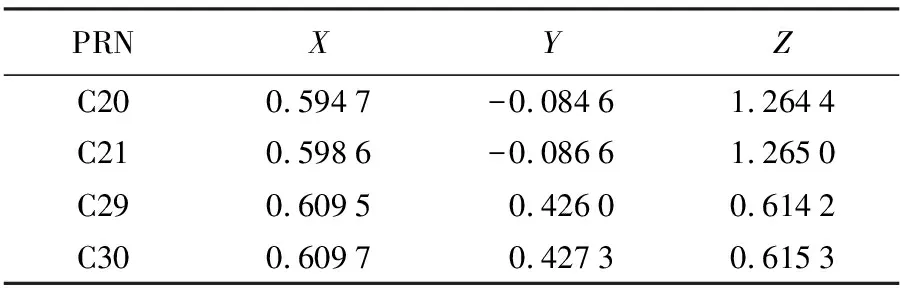
表2 卫星质心改正
本文选取的观测数据时间为2019年12月29日至2020年1月23日。图1为4颗卫星的SLR观测数据、SLR台站数量和11颗卫星的星间链路数,由图1(a)可以看出,C30有效数据不足100个。由图1(b)可以看出,在选取的时间跨度内,能够观测到C20和C30卫星的SLR台站数量均为12个,观测到C21和C29卫星的SLR台站数量均为11个。由图1(c)可以看出,与C30、C39和C40有关的星间链路数据量较少。
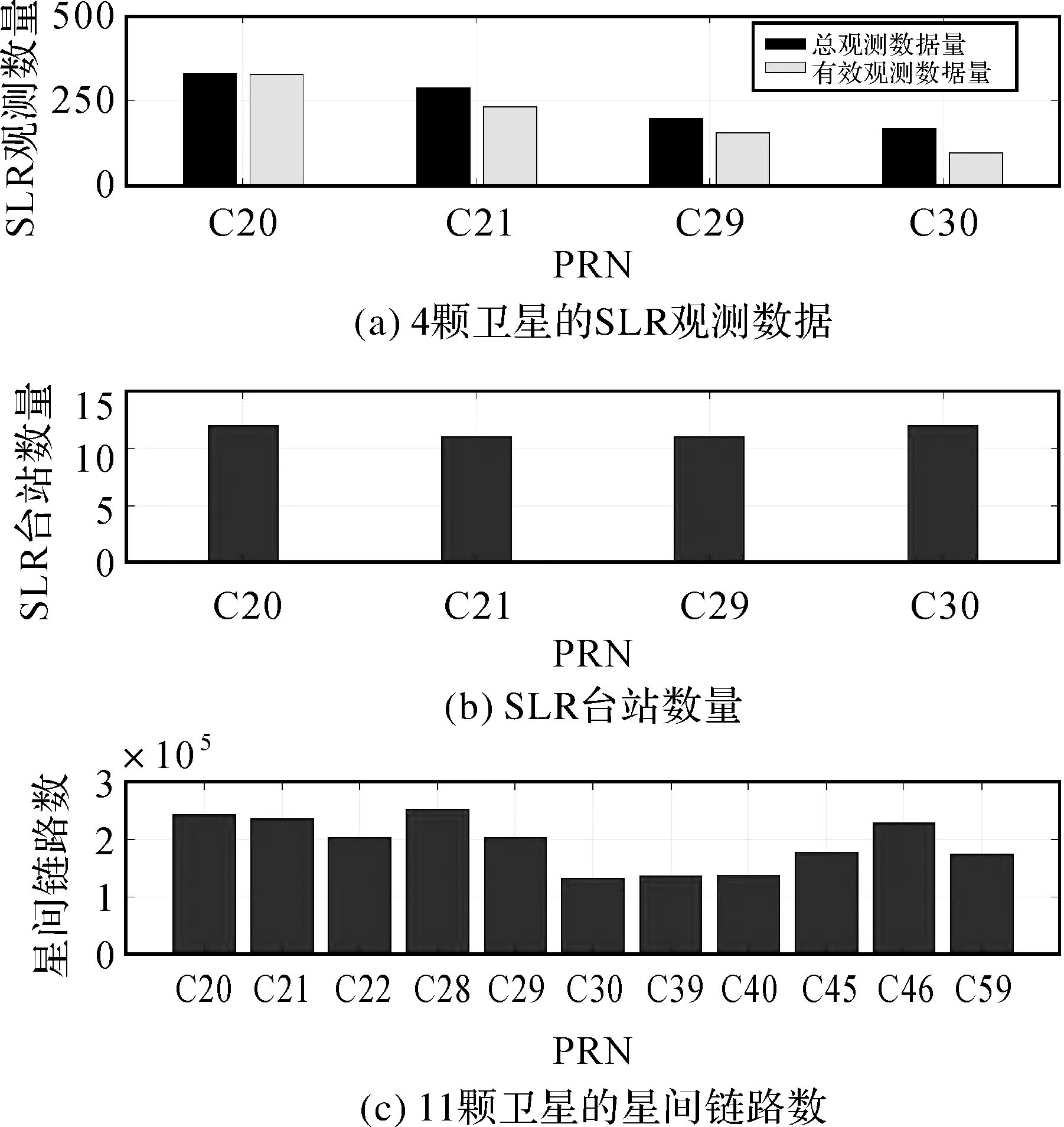
图1 BDS卫星SLR观测情况Fig.1 BDS satellite SLR observations
1.2 定轨方法和模型
星间链路测距是一种时分体制的双向单程距离测量,测距值包含两颗卫星的距离和钟差信息,通过对两个测距值分别进行求和和做差的方法,可以将两颗建链的卫星钟差和距离信息解耦。星间双向测距观测方程为[9]
ρ(t0)=|ρAB(t0)-ρBA(t0)|+
(1)
SLR观测量是台站到卫星的距离,假设原始观测距离为ρ′,观测方程为
ρ0=ρ′-(ΔρTD+ΔρRF+ΔρREL+ΔρMC+ΔρRO)
(2)
式中,ΔρTD为台站位置的潮汐变化给测距带来的误差;ΔρRF为光线在大气中的折射效应给测距带来的误差;ΔρREL为光线在引力场中的广义相对论效应给测距带来的偏差;ΔρMC为激光在卫星表面的反射点对质心的偏离及ΔρRo为台站本身观测的系统偏差。
如果仅采用星间链路进行精密定轨,会引起星座整体旋转,增加地面站的星地观测数据可以解决此问题,实现对BDS卫星的精密定轨。因此本文采用SLR和星间链路联合对BDS卫星精密定轨,数据处理所用软件为自主研发的地球卫星精密定轨软件EODP,该软件可以处理多种类型(包括SLR)测量数据并实现精密定轨,已经在北斗导航、月球探测工作中得到了充分应用,目前该软件的功能和性能在持续发展中。采用解耦后的卫星星间相对距离(式(1))和SLR观测方程(式(2)),通过动力学统计定轨算法,同时对多颗卫星的参数进行解算,包括动力学参数和测量参数,得到每颗卫星的精密轨道。虽然观测数据采用星间几何距离,但是仍然会受到星间链路设备的接收和发射时延影响[8],因此每颗卫星的设备时延会与卫星轨道和动力学参数等一起解算,详细的定轨策略见表3,SLR和星间链路联合定轨如图2所示。
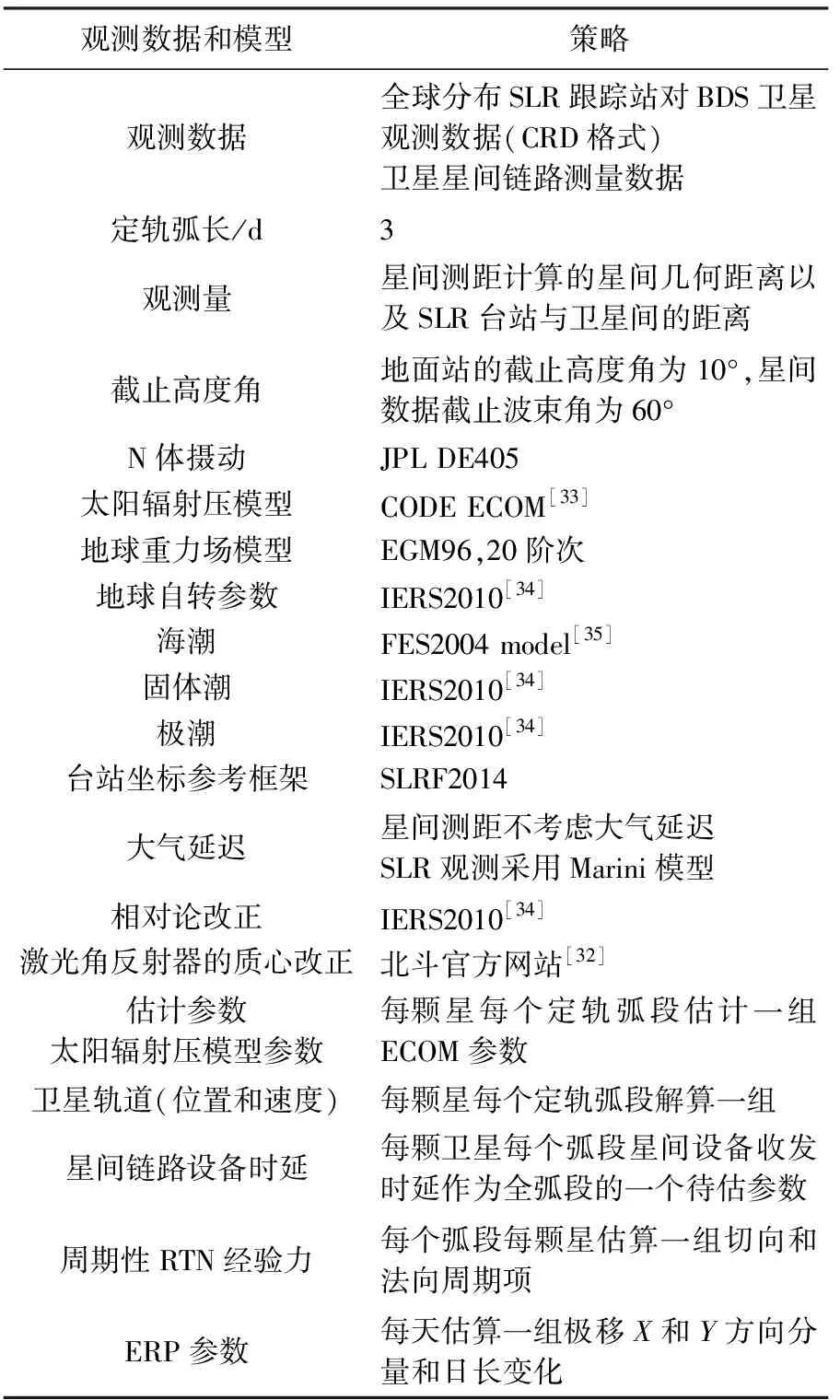
表3 SLR和星间链路联合定轨策略
1.3 太阳光压模型对卫星轨道影响
对于中高轨导航卫星来说,太阳光压摄动力是除地球引力、日月引力外最大的一项非保守摄动力,是影响卫星轨道精度的主要摄动源。目前使用广泛的是CODE针对GPS卫星建立的经验型ECOM(extended CODE orbit model)模型,表达式为
(3)
式中,D为卫星指向太阳方向;Y沿一个太阳翼的轴向;B与D和Y符合右手准则;D0、Dc、Ds、Y0、Yc、Ys、B0、Bc、Bs为9个参数,把太阳光压摄动力分解在D、Y、B3个方向上。在GPS卫星高精度定轨处理时,由于各参数之间存在高度相关性,并不是所有的9个参数均参与解算。多个IGS分析中心采用仅包含D0、Y0、B0、BC和BS 5个参数的ECOM 5参数模型。GPS卫星全部为MEO卫星,一直采用动偏航姿态控制模式,BDS采用的是GEO、IGSO和MEO 3类混合星座,卫星的姿态控制模式也与GPS不同。卫星姿态控制模式不同,会造成太阳辐射压模型不同,因此适用于GPS的ECOM模型被用于BDS卫星时精度会受到影响,这一问题引起众多学者开展适用于BDS卫星的光压模型研究[8,36]。
采用2019年12月29日至2020年1月23日全球SLR跟踪站观测数据和ISL数据,定轨弧长为3 d,为了选取最优太阳光压模型,进行3组定轨试验,具体如下。
试验1:11颗卫星全部采用ECOM 9参数模型。
试验2:11颗卫星全部采用ECOM 5参数模型。
试验3:GEO卫星采用ECOM 9参数模型,MEO和IGSO卫星采用ECOM 5参数模型。
图3为3组试验轨道重叠差异的RMS,表4为对3种类型卫星轨道重叠差异的RMS均值。由图3和表4可以看出,试验2和试验3得到的卫星轨道径向精度优于试验1得到的卫星轨道径向精度,试验1和试验2得到的卫星轨道三维位置精度优于试验3得到的卫星三维位置精度。因此本文精密定轨中,11颗卫星全部采用ECOM 5参数模型。
2 精密定轨分析
本文采用2019年12月29日至2020年1月23日星间链路及全球SLR跟踪站的观测数据对11颗卫星进行精密定轨,相邻两个弧段有12 h的重叠时间,每个定轨弧段时间跨度、SLR观测数据量和台站数见表5。1月11日至1月14日SLR观测数据量和台站数量少,1月15日至1月17日缺少SLR观测数据,因此剔除1月12日至1月17日数据。
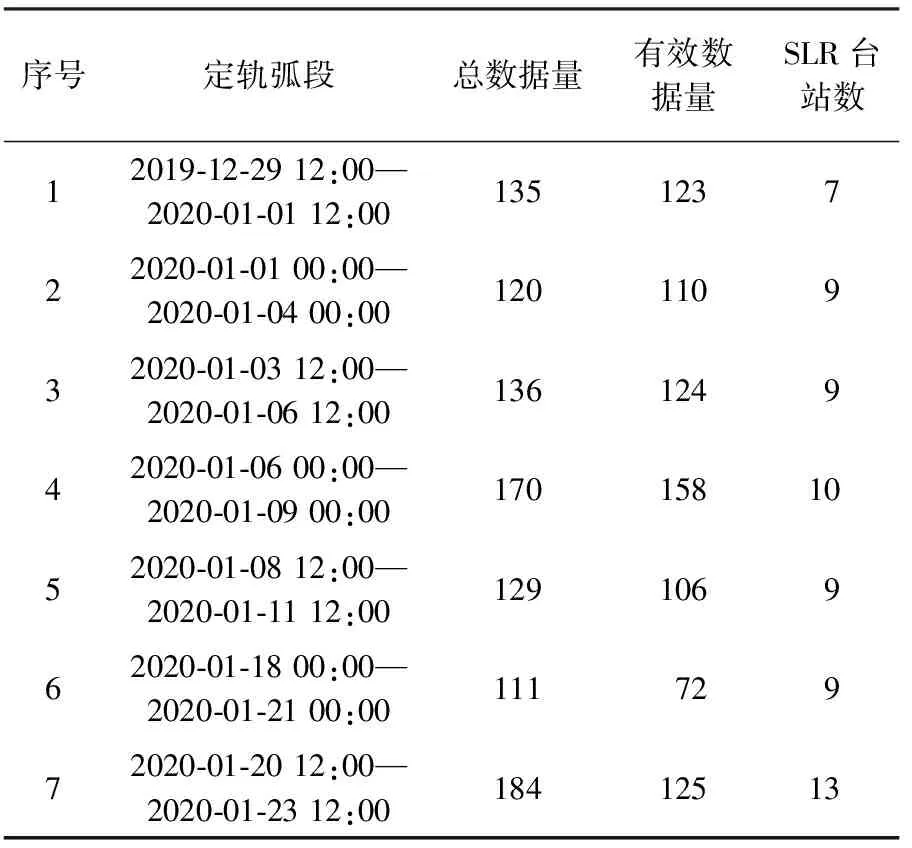
表5 定轨弧段、SLR观测数据和台站数统计
2.1 定轨残差分析
定轨残差是定轨精度和可靠性的重要内部验证手段,是检验定轨内符合精度的重要手段。11颗卫星不同链路测距数据的定轨残差时间序列如图4所示,可以看出,大部分时段的链路定轨残差在±20 cm以内波动。图5为不同链路定轨残差的RMS,可以看出,大部分链路的RMS小于5 cm。表6为每颗星所有链路的定轨残差RMS值,可以看出11颗星RMS均值为4.8 cm,MEO、IGSO和GEO卫星RMS分别为4.6、4.9和5.9 cm,3种类型卫星定轨残差相当。C30的残差偏大,这可能与激光观测数据及星间链路数据量有关。文献[6]采用星地伪距相位数据和星间链路数据联合对8颗BDS-3 MEO卫星精密定轨,星间链路定轨残差的RMS小于6.0 cm。文献[8]计算的星间测距数据残差的RMS优于8.0 cm,两颗同轨道的MEO卫星RMS最小为4.7 cm。两篇文献中MEO卫星残差的RMS与本文MEO卫星定轨残差RMS值相当。
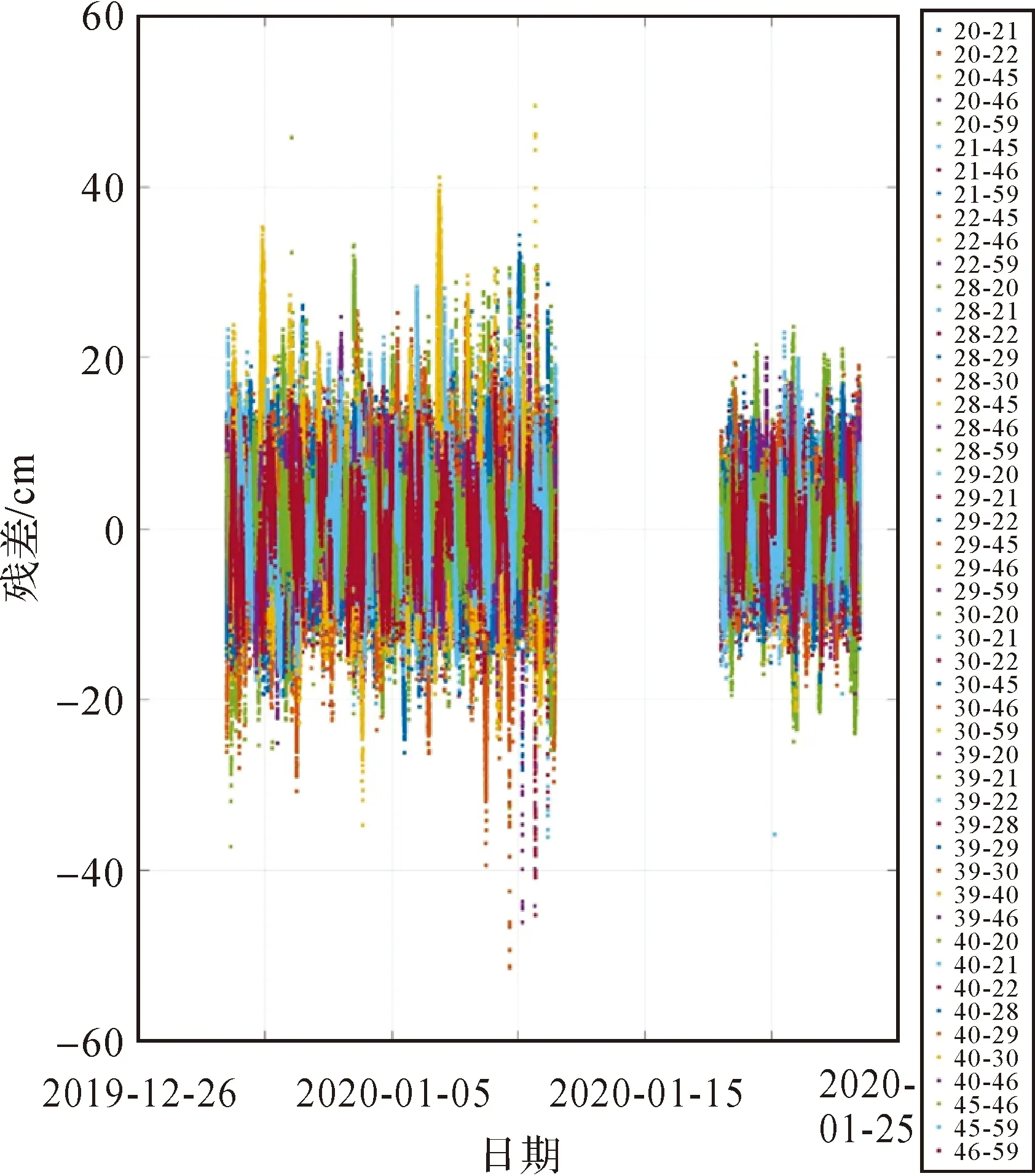
图4 11颗卫星的ISL测距数据定轨残差 Fig.4 Orbit determination residual using ISL measurements
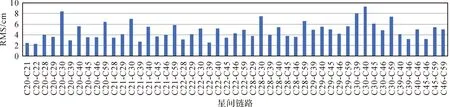
图5 49条链路的星间链路残差RMSFig.5 RMS of orbit determination residual for all 49 ISL
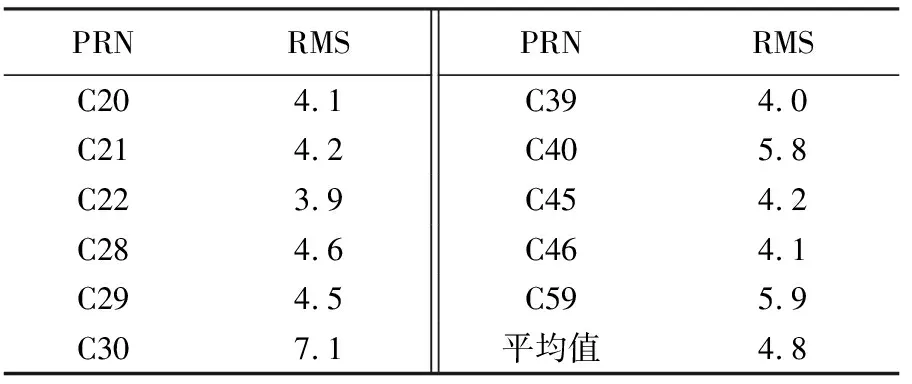
表6 每颗卫星所有链路数据的定轨残差RMS值
本次解算每个激光跟踪站的SLR观测数据定轨残差如图6所示,可以看出,时间序列波动比较平稳,定轨残差的RMS为1.5 cm。图7为每个台站所有定轨弧段SLR定轨残差RMS的均值,除7105、7237、7827和7840台站外,其他台站定轨残差的RMS在1.5 cm以内。
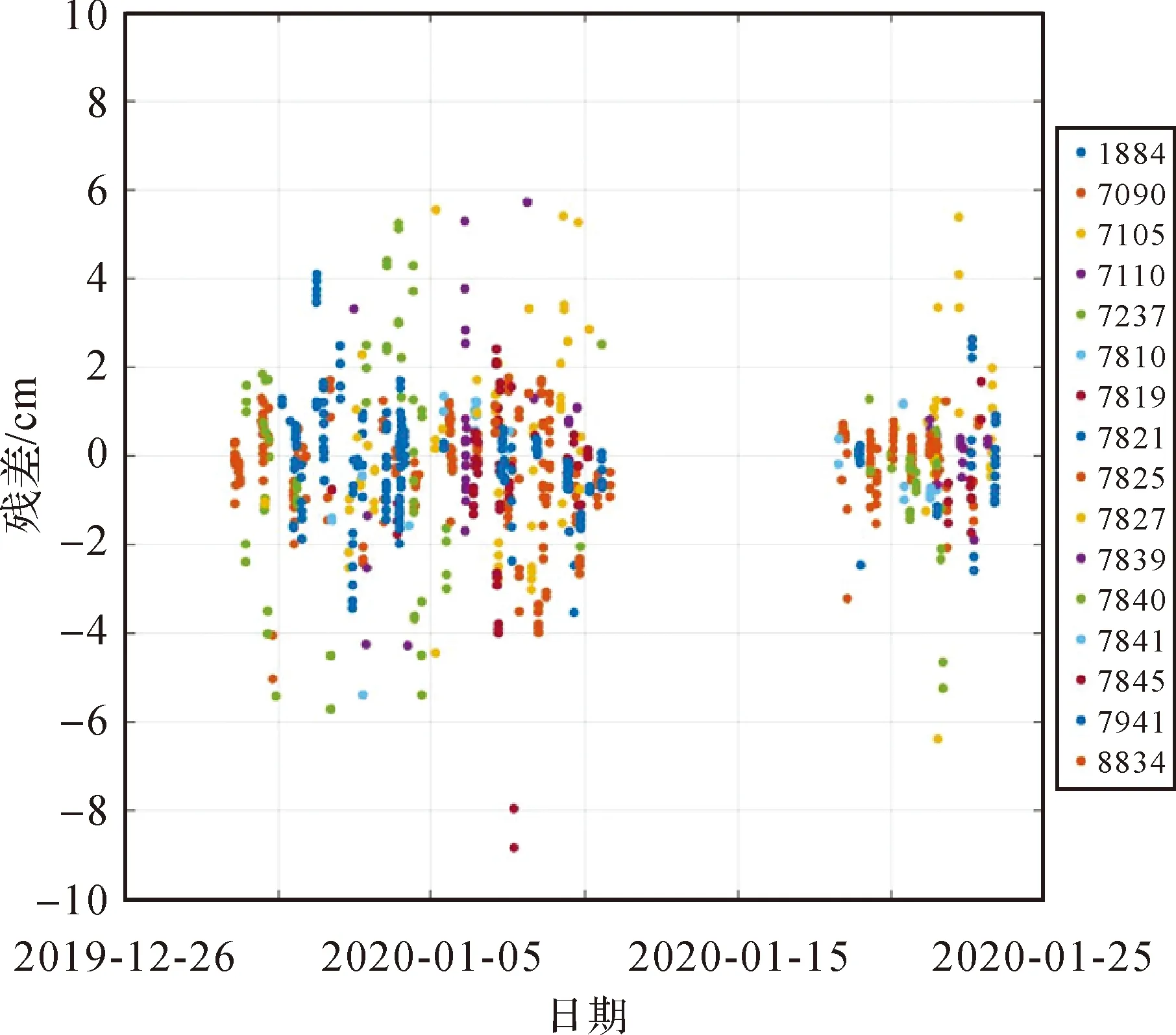
图6 每个SLR台站定轨残差Fig.6 Orbit determination residuals for every SLR stations
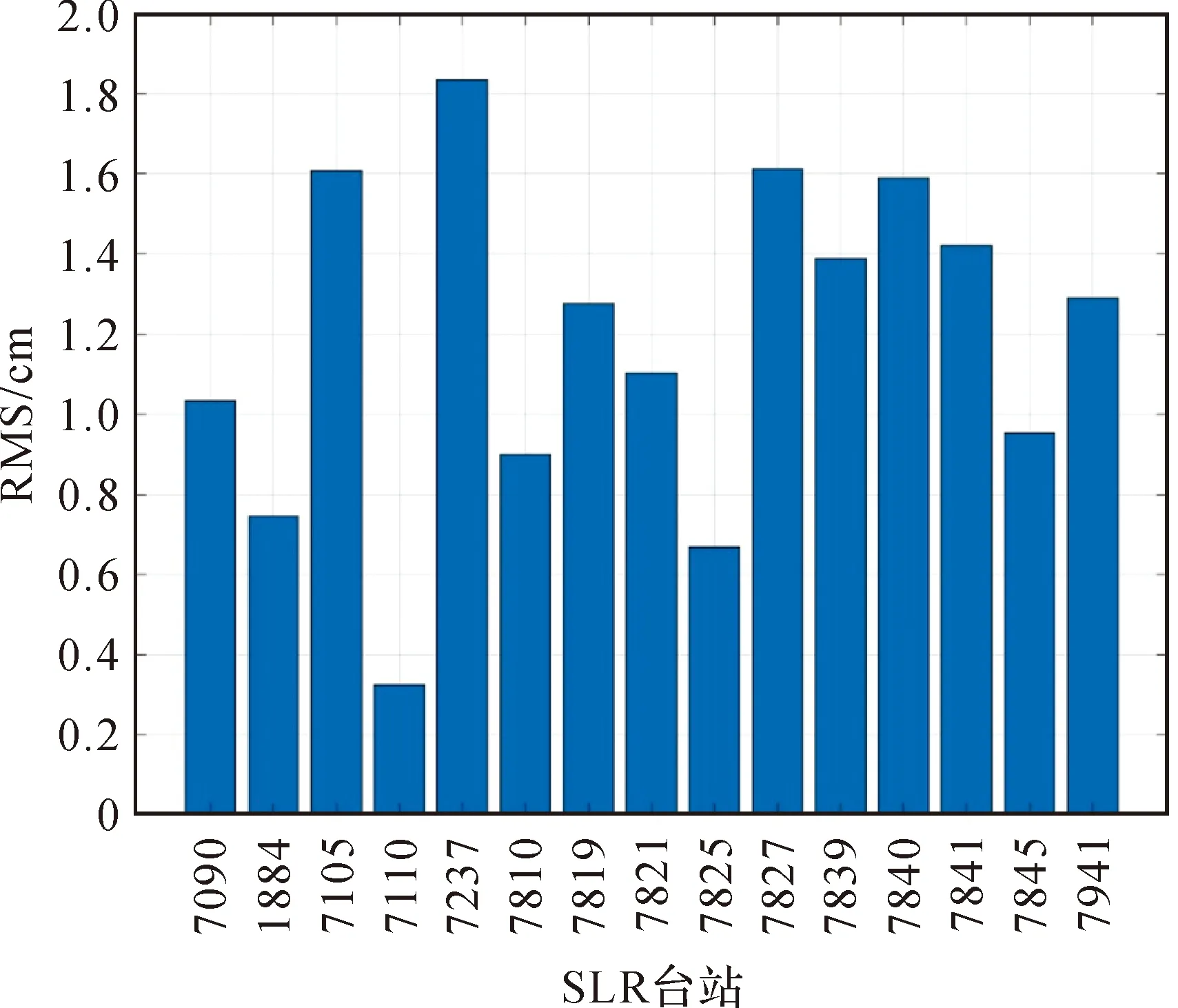
图7 每个SLR台站定轨残差的RMSFig.7 RMS values of orbit determination residuals for every SLR stations
2.2 轨道重叠精度分析
重叠弧段是卫星定轨精度重要的内符合评估方法之一。图8为3 d定轨弧长重叠12 h的轨道在径向、切向、法向及三维位置差异的RMS,结果表明MEO、IGSO和GEO卫星在径向精度分别为3.7、4.1和8.2 cm,三维位置精度分别为27.8、35.4和39.1 cm,GEO卫星轨道精度低于MEO和IGSO卫星轨道精度。
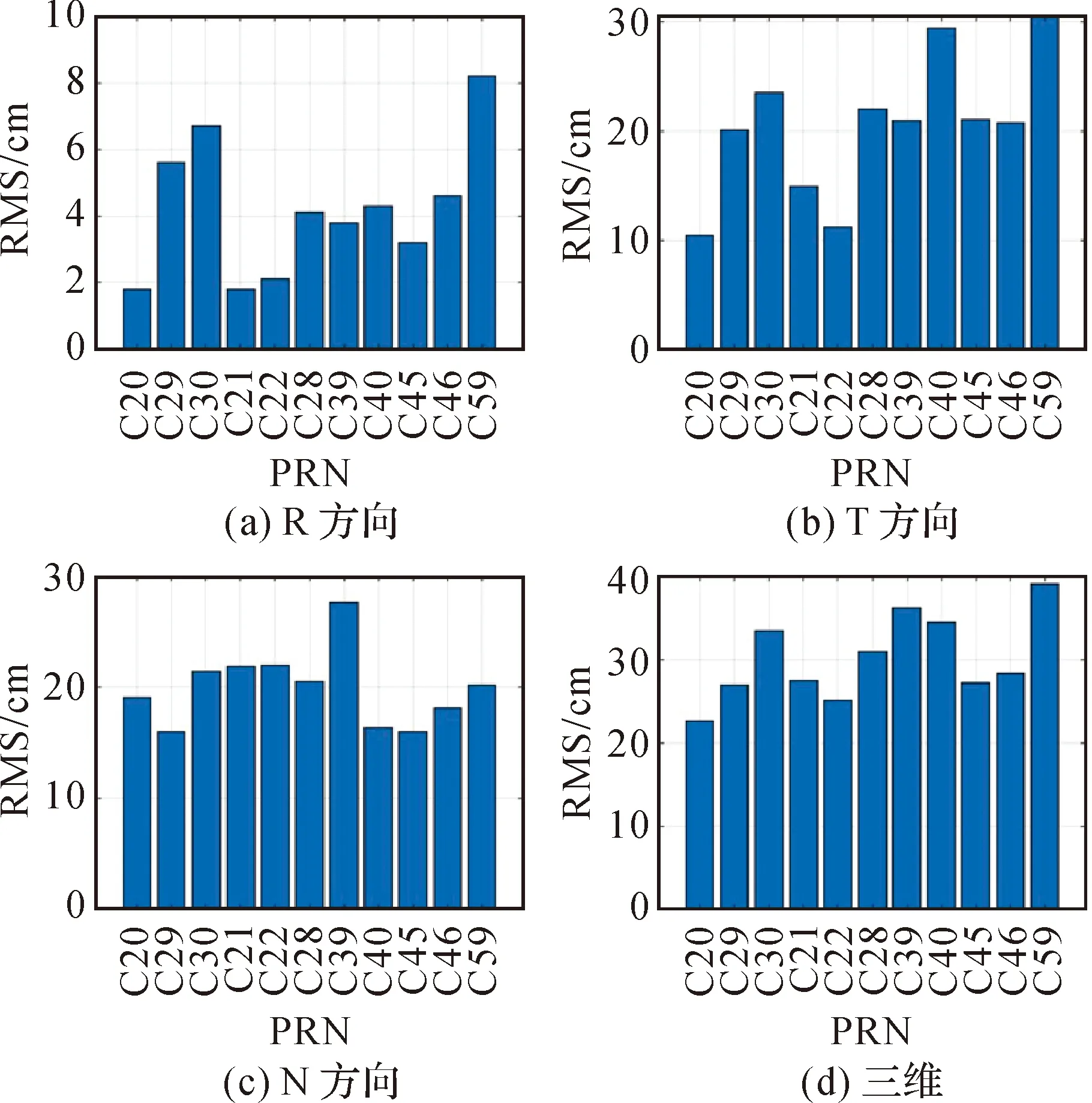
图8 11颗卫星轨道重叠差异RMS统计Fig.8 RMS values of the orbit overlap comparison for 11 satellites
采用同样弧段单SLR观测数据和ECOM5参数模型,定轨弧长为3 d,对4颗具有SLR观测的BDS-3卫星精密定轨。表7为与武汉大学事后精密轨道差异及轨道重叠差异的RMS值,可以看出,轨道重叠差异径向RMS为14.3 cm,三维位置RMS为137.8 cm。与武汉大学事后精密轨道差异径向RMS为12.2 cm,三维位置RMS为98.8 cm。文献[11]采用单SLR观测数据对ILRS跟踪观测的9颗BDS卫星精密定轨,3 d定轨弧长,MEO、IGSO和GEO卫星轨道重叠三维精度最优分别约为155.0、138.0和261.0 cm,与武大事后精密轨道比较,MEO卫星三维精度最优为154.0 cm。由于GEO卫星的静地特性,仅基于地基数据的GEO卫星定轨精度与MEO卫星定轨精度相比较差。从SLR与ISL联合定轨结果与单SLR观测数据定轨结果的比较可以看出,加入星间链路之后卫星轨道精度得到明显提高。
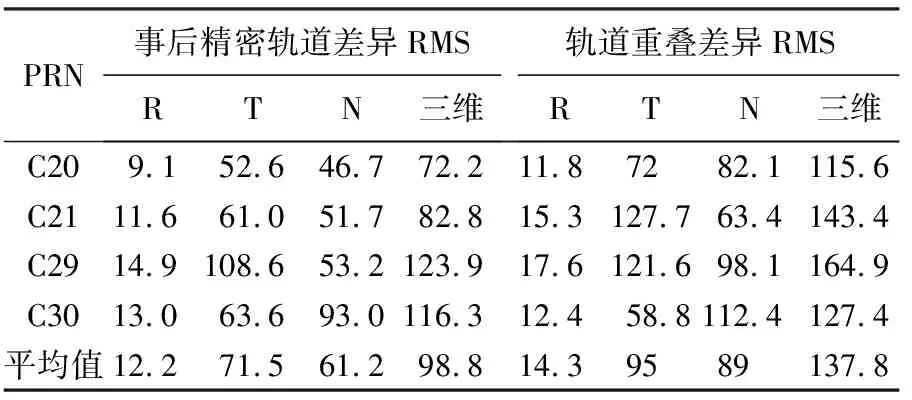
表7 单SLR观测数据对4颗BDS-3卫星精密定轨精度
文献[6]采用6个区域站的L波段星地数据和8颗BDS-3 MEO卫星的星间链路数据联合定轨轨道重叠径向和三维精度分别约为2.5 cm和12.4 cm。文献[7]采用中国境内站L波段星地数据和星间链路定轨,BDS-3 MEO卫星轨道重叠径向和三维精度分别为1.0 cm和16.0 cm,全球站星地数据和星间链路定轨卫星轨道重叠径向和三维分别为2.0 cm和7.0 cm。与本文MEO卫星定轨径向精度相当,三维精度高于本文结果,这可能与SLR观测数据量小于两篇文献中星地观测数据量有关。文献[8]采用1个地面站,利用星间双向测距数据进行集中式自主定轨结果卫星径向重叠弧段约6.0 cm,切向和法向优于50.0 cm,径向与本文结果相当,法向和切向差异略大,这可能是由于文献[8]仅采用1个地面站,与本文15个全球分布SLR台站相比,对卫星轨道的定向参数约束不够。比较结果说明星间链路与地面锚固站星地观测数据的联合定轨不但与星地观测数据量有关,与地面锚固站的数量及分布也有关,数量越多,分布越均匀,对整体星座的约束会更强,进而提高卫星轨道精度。
文献[12]采用2014—2017年期间ILRS组织的3次对各GNSS系统卫星SLR加强观测数据进行精密定轨,分析结果表明如果采用3 d定轨弧长,至少10个跟踪站和60个SLR观测数据可以获得MEO卫星径向精度为3.0 cm。表8为本文采用的7个定轨弧段(定轨弧段见表5)中SLR有效观测数据及台站数量,可以看出目前BDS-3卫星的SLR有效观测数据量较少,如果能够进行加强观测,有助于提升定轨精度。
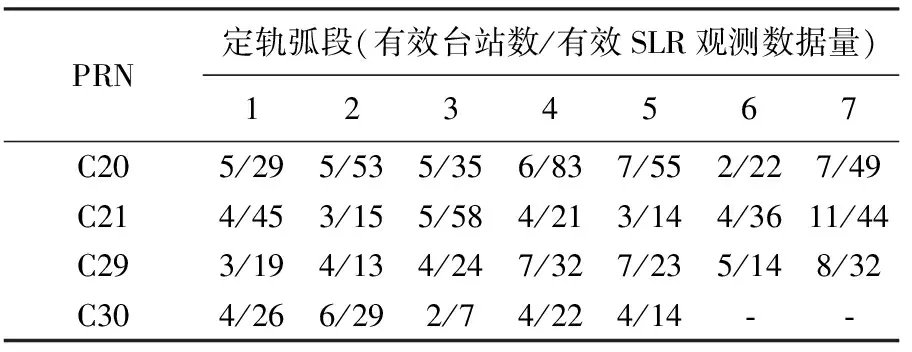
表8 每个定轨弧段每颗卫星的有效观测数据及台站数
2.3 轨道互比精度分析
与其他精密轨道产品进行比较也是评估定轨精度的一个重要检验手段,本文采用武汉大学提供的事后精密星历对定轨精度进行检验。由于武汉大学提供的精密星历在本文所选时间范围内只有C37之前的卫星轨道,因此比较C20至C30共6颗卫星的轨道精度,径向、切向、法向和三维轨道差异的RMS如图9所示,6颗卫星径向、切向和法向差异的RMS均值分别为6.4、22.8和21.4 cm,三维位置差异RMS均值为32.8 cm。结果差异偏大,这是因为精密星历采用的是全球GNSS监测站观测数据,本文采用的是15个全球SLR跟踪站和星间链路数据。
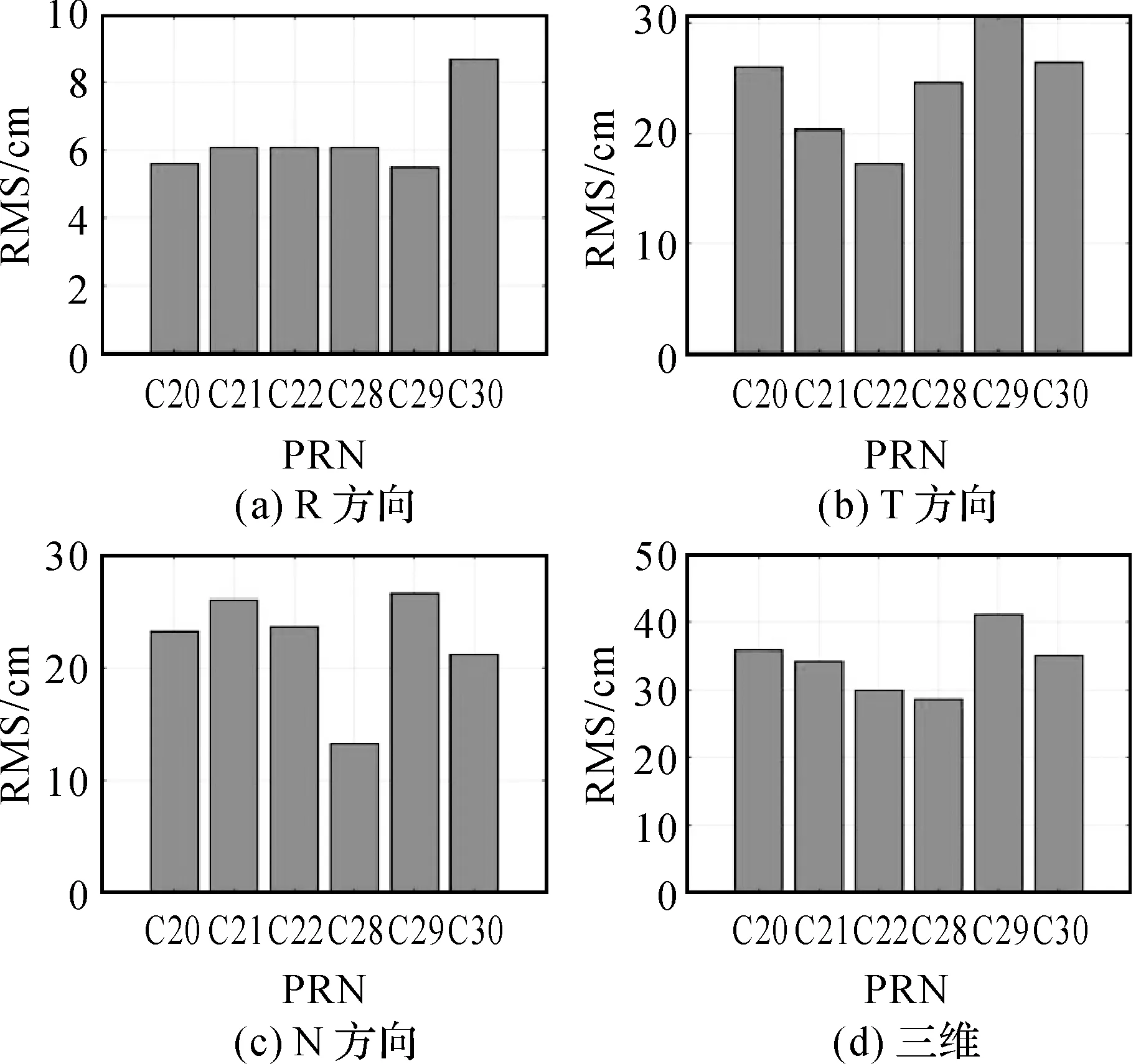
图9 6颗卫星轨道差异的RMSFig.9 RMS values of the orbit comparison for 6 satellites
2.4 轨道预报精度
通过11颗卫星3 d弧长定轨分别预报12 h和24 h的卫星轨道与精密轨道比较可以对预报轨道精度进行评估。图10为各卫星预报12 h和24 h的轨道分别与精密轨道互差的RMS统计,可以看出GEO和IGSO卫星的轨道预报RMS偏大。表9为统计MEO、GEO和IGSO 3类卫星12 h和24 h的轨道预报差异的RMS均值,结果表明MEO卫星12 h的轨道预报精度最高,径向精度为6.0 cm,切向和法向精度约为25.0 cm,三维精度优于40.0 cm。IGSO卫星12 h的轨道预报径向精度优于10.0 cm,法向和切向精度优于40.0 cm,三维精度优于60.0 cm。GEO卫星12 h的轨道预报径向精度优于20.0 cm,三维精度约为100.0 cm。MEO卫星的24 h轨道预报精度最高,径向精度为7.0 cm,切向和法向精度优于30.0 cm,三维精度约为40.0 cm。IGSO卫星24 h的轨道预报径向精度约为10.0 cm,法向和切向约为40.0 cm,三维精度优于60.0 cm。GEO卫星24 h的轨道预报径向精度优于25.0 cm,切向和法向精度约为80.0 cm,三维精度为120.0 cm。

图10 11颗卫星12 h和24 h的预报轨道误差的RMSFig.10 RMS of 12 h and 24 h predicted orbit errors for 11 satellites
文献[6]加入星间链路后24 h MEO卫星轨道预报径向误差为5.3 cm,三维误差为22.3 cm。文献[7]区域站和星间链路定轨预报24 h的BDS-3的MEO卫星轨道三维精度为23.0 cm,全球站和星间链路定轨预报24 h的卫星轨道三维精度为18.0 cm。两篇文献分析的轨道预报精度比本文精度高,这与两篇文献采用的星地观测数据量比本文采用的SLR数据量多有关。文献[8]集中式自主定轨卫星24 h预报轨道径向重叠弧段优于10 cm,法向和切向预报轨道重叠弧段优于1 m,径向精度与本文结果相当,法向和切向精度略差,这可能也与文献[9]只采用1个地面锚固站有关。
3 不同轨道类型卫星建链对定轨精度影响分析
本文分析的11颗卫星中包含8颗MEO、2颗IGSO和1颗GEO卫星,为了分析不同轨道类型卫星建链对定轨精度的影响,进行3组定轨试验,具体如下。
试验1:全球分布SLR台站观测数据和8颗MEO卫星的星间链路数据联合定轨。
试验2:全球分布SLR台站观测数据、8颗MEO卫星和2颗IGSO卫星的星间链路数据联合定轨。
试验3:全球分布SLR台站观测数据、8颗MEO卫星、2颗IGSO卫星和1颗GEO的星间链路数据联合定轨。
图11为3组试验中8颗MEO卫星轨道重叠差异的RMS值,表10为3组试验得到的8颗卫星轨道重叠差异RMS均值,可以看出3种试验得到的卫星轨道精度相当,径向精度约为4 cm,法向和切向精度约为20 cm,三维精度约为30 cm,说明由于星间链路的测量特性,不同轨道类型建链对BDS卫星定轨精度影响较小。
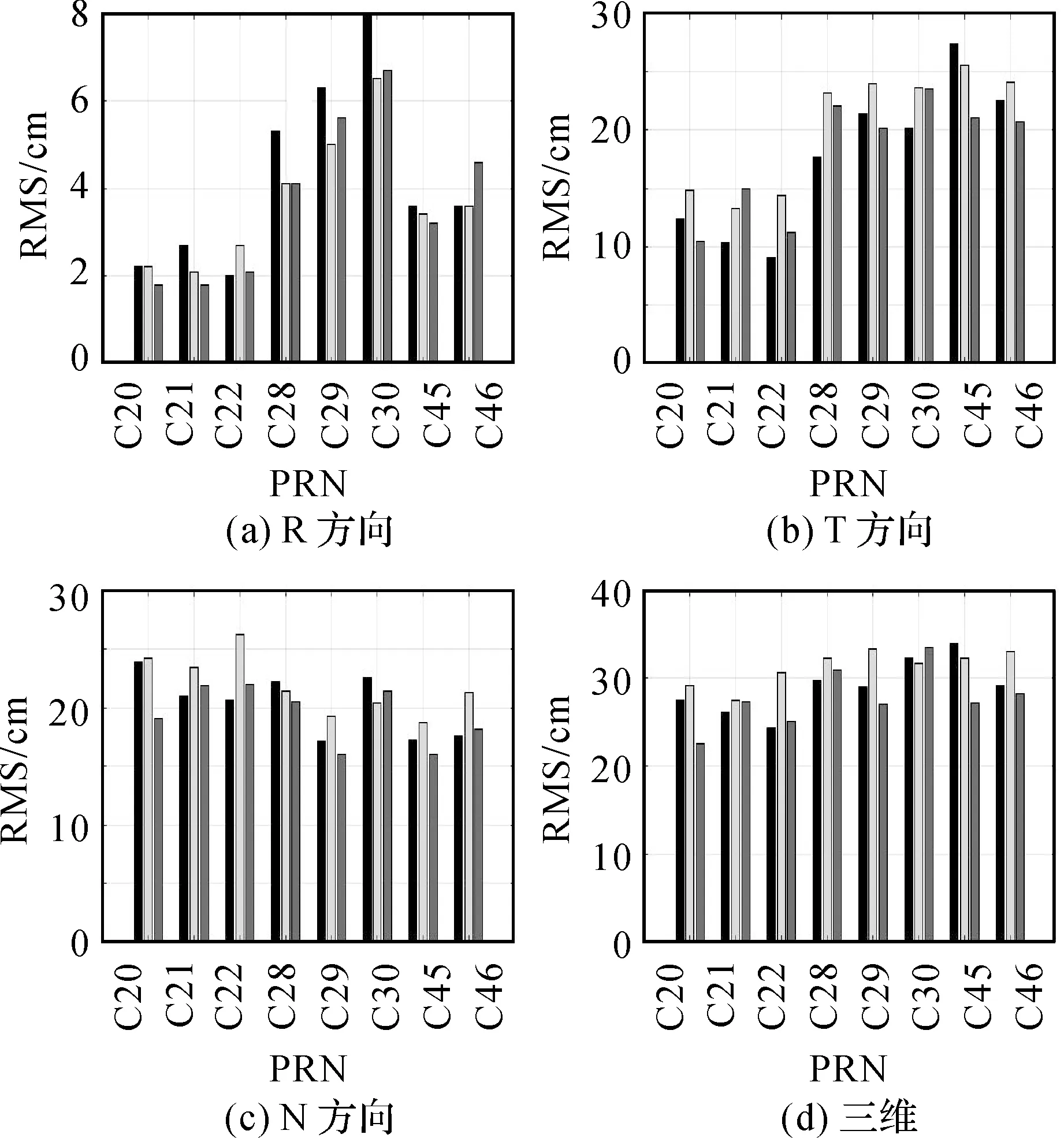
图11 3组试验得到的MEO卫星轨道重叠差异RMSFig.11 RMS of Overlap comparision of orbits for MEO stallites in three experments
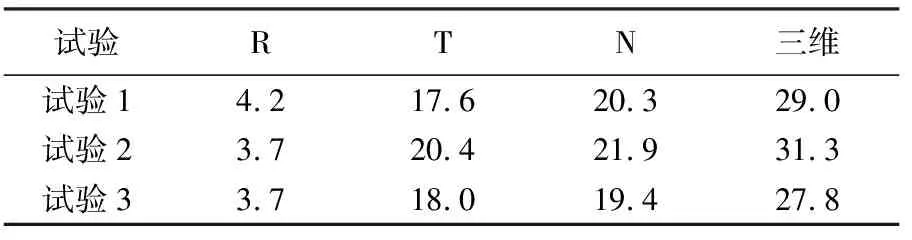
表10 3组试验卫星轨道重叠差异RMS均值
4 ERP精度评估
本文在解算卫星轨道的同时,每天解算一组ERP参数极移X分量(Xp),Y分量(Yp)和日长变化,以IERS C04值为标准来评估解算参数精度,极移和日长变化与IERS C04差异的时间序列如图12所示,Xp和Yp精度分别为3.10和2.53 mas,日长变化精度为0.35 ms。文献[30]采用全球激光站LAGEOS卫星观测数据解算极移和日长变化精度分别约为0.4 mas和0.03 ms,采用中国区域SLR台站LAGEOS卫星观测数据解算极移和日长变化精度分别为约5 mas和0.32 ms,可以看出SLR台站分布与观测数据量会对ERP参数精度产生影响。本文虽然采用SLR跟踪站台站是全球分布,与仅采用SLR或者GNSS解算结果[28,30]相比,解算参数精度偏低的原因可能与SLR对BDS-3卫星的观测数据量少有关。如果可以对BDS-3卫星加强激光观测,有望获得更高精度的ERP参数。
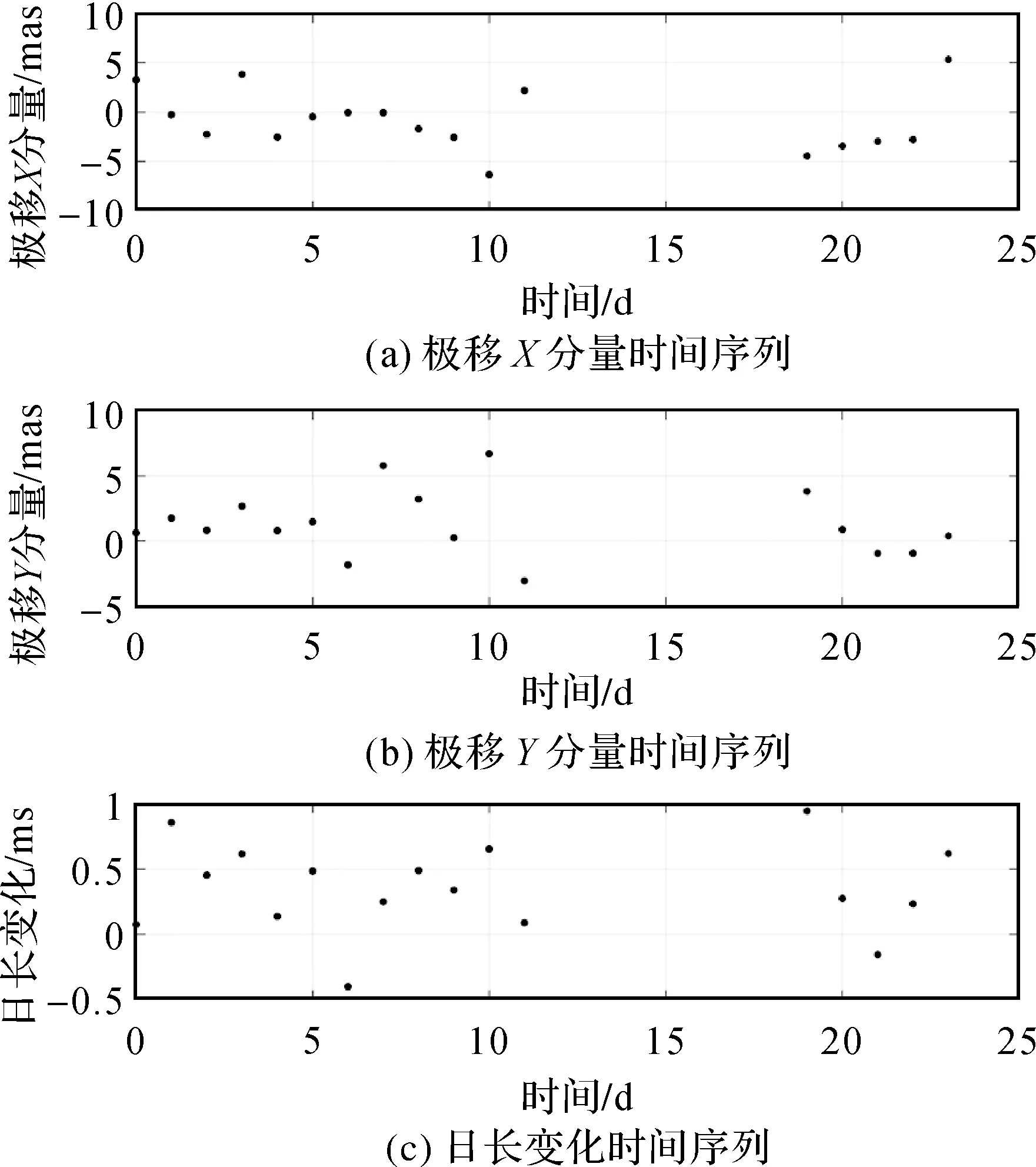
图12 极移和日长变化时间序列Fig.12 Time series of pole motion and ΔLOD
5 结 论
与GNSS技术相比,SLR技术不受模糊度、电离层等因素影响,而且观测数据及数据处理方法相对简单,除可以用于卫星精密定轨外,由于其技术特点,在地球参考框架、地心运动等研究中也发挥重要作用。星间链路双向测量已经在BDS中得到成功应用,BDS卫星的轨道精度有较大提高并实现轨道全覆盖。因此本文采用2019年12月29日至2020年1月23日全球SLR跟踪站的SLR观测数据和BDS卫星星间链路测量数据对BDS-3的11颗卫星(MEO/IGSO/GEO)联合精密定轨和ERP参数解算并进行精度评估。通过分析比较结果为:
(1) 星间链路定轨残差优于5.0 cm,SLR定轨残差优于2.0 cm。
(2) 少量SLR和星间链路可以实现导航卫星精密定轨,重叠精度分析表明11颗卫星轨道径向精度为4.2 cm,三维位置精度为30.2 cm,MEO、IGSO和GEO 3种不同轨道类型卫星定轨精度相当。轨道互比精度表明卫星径向RMS均值为6.4 cm三维位置RMS均值为32.6 cm。
(3) 轨道预报精度分析表明MEO卫星12 h和24 h径向精度优于7.0 cm,三维精度40.0 cm左右;GEO卫星12 h和24 h径向精度分别约为17.0 cm和24.3 cm,三维精度约为1 m;IGSO卫星径向约为10.0 cm,三维精度优于60 cm。
(4) SLR与星间链路联合定轨,由于星间链路的测量特性,不同轨道类型卫星建链对定轨精度影响较小。
(5) SLR与星间链路联合可以实现ERP参数的解算,极移精度约为3.0 mas,日长变化精度为0.35 ms。
本文分析结果表明,联合少量SLR和星间链路可以获得卫星的高精度轨道,如果能够对BDS卫星加强激光观测,不但有助于提升轨道精度,也可以实现参考框架以及大地测量参数的推导等,为BDS的自主时空基准参数解算提供参考。
猜你喜欢
作文大王·笑话大王(2023年8期)2023-07-17
中国科学院院刊(2022年8期)2022-09-02
网络安全与数据管理(2022年3期)2022-05-23
西藏科技(2021年12期)2022-01-17
北京航空航天大学学报(2020年10期)2020-11-14
空间科学学报(2020年3期)2020-07-24
自动化学报(2019年6期)2019-07-23
测绘科学与工程(2017年4期)2017-05-25
西藏科技(2015年6期)2015-09-26
河南科技(2015年8期)2015-03-11
