永磁直线同步电机智能分数阶动态面控制*
2023-09-26 07:18王丽梅
组合机床与自动化加工技术 2023年9期
武 训,王丽梅
(沈阳工业大学电气工程学院,沈阳 110870)
0 引言
永磁同步直线电机(PMLSM)具有推力密度高,热损耗低,精度高的优点,广泛应用于高精密数控加工领域[1-2]。PMLSM采用直驱结构,与旋转电机相比,省略了中间传动环节。虽然效率大幅度提升,但是传动机构间的摩擦力,负载扰动等不确定因素都会直接作用在PMLSM动子上,导致PMLSM控制难度的增加[3]。因此,选取有效的控制策略,提升系统的跟踪精度与鲁棒性具有重要的意义。
反步控制因其对非线性系统良好的控制效果,广泛应用于伺服系统中。其设计思路是分解非线性系统为不超过其系统阶数的子系统,并为每个子系统设计其对应的Lyapunov函数与虚拟控制量,保证每一阶子系统的有界收敛,最后反推到整个系统并由此设计出整个系统的控制律。但该方法需要对系统进行精确建模,无法克服扰动的影响且设计中对系统虚拟控制量的反复求导易产生微分爆炸问题,为此需对反步控制进行改进[4-5]。TING等[6]在反步控制的基础上,利用RBF神经网络对系统非线性因素进行估计补偿,提高了系统的跟踪精度与鲁棒性。刘乐等[7]在反步滑模控制的基础上,引入动态面控制(dynamic surface control,DSC),解决“微分爆炸”问题并使用极限学习机与非线性扰动观测器逼近系统的匹配与非匹配不确定项,利用智能算法优化系统参数,提高了系统的跟踪精度、收敛速度与鲁棒性。
近年来,分数阶理论广泛地应用于各类控制器设计中。相比于整数阶控制器,分数阶控制器具有更高的参数自由度,更好的系统控制效果与更强的鲁棒性[8-9]。雷城等[10]设计分数阶滑模面代替传统整数阶滑模面,并引入低次积分项进一步优化,使用模糊推理估计切换增益,削弱了抖振,有效提升了系统的控制性能。CHEN等[11]设计了分数阶反步控制器,利用函数链接神经网络估计补偿系统不确定项,使系统得到了良好的控制效果及强鲁棒性,但并未解决“微分爆炸”问题。
为此,提出了一种基于RBF神经网络的分数阶动态面控制(fractional order dynamic surface control based on RBF neural network,RBF-FDSC)方法。在反步控制的基础上,引入动态面控制技术,避免对虚拟控制量反复求导产生的“微分爆炸”问题;将分数阶微积分项加入到虚拟控制量中,增加系统的参数自由度,加快系统的响应速度,减小跟踪误差;利用RBF神经网络的逼近补偿系统的不确定项,设计自适应率,在线调整RBF神经网络的权值,进一步提高系统的跟踪性能与鲁棒性。
1 永磁直线同步电机数学模型
忽略磁通畸变的情况下,PMLSM的d-q轴模型电压方程为:
(1)
式中:
(2)
式中:ud、uq分别为d、q轴电压,Rs为相电阻,τ为极距,id、iq、Ld、Lq、ψd、ψq分别为d、q轴电流电感与磁链,ψPM为励磁磁链。
永磁直线同步电机理想状态下的电磁推力方程为:
(3)
根据矢量控制理论,在d、q坐标系下,采用id=0的控制方式,永磁同步直线电机的电磁推力方程则可简化为:
(4)
式中:Kf表示电机的推力系数,np为极对数。
由上述可以得到,永磁同步直线电机的推力方程与机械运动方程为:
Fe=Kfiq
(5)
(6)
式中:M为电机动子质量,FL为电机的负载阻力,D为摩擦系数,v为电机动子的速度。
由式(5)和式(6)可以得到PMLSM的动态方程为:
(7)
式中:p为电机动子的位置。在上式基础上令A=-D/M,B=Kf/M,C=-1/M,并考虑各种不确定因素存在的情况下,改写动态方程为:
(8)
式中:ΔA、ΔB、ΔC分别为A、B、C由系统参数M、D引起的不确定项,系统总不确定量合集H为:
(9)
假定其为有界值,即|H|≤ρ,ρ为正数。
2 智能分数阶动态面控制器设计
2.1 分数阶动态面控制器设计
将PMLSM的数学模型改写为:
(10)
式中:x1为电机的实际位置,H为系统不确定项合集,假定|H|≤ρ。
定义系统的跟踪误差为:
e1=x1-xd
(11)
式中:xd是系统的给定轨迹指令。
(12)
式中:r为运算的阶次,一般r为有理数,t、μ分别为微积分的上下限。工程上常使用Caputo定义。
(13)
式中:n>r>n-1,Г(·)为伽马函数,定义为:

(14)
本文使用滤波频段为(ωb,ωh)的改进Oustaloup滤波器逼近分数阶微积分值。滤波器公式为:
(15)
式中:
(16)
定义系统的虚拟控制量为:
(17)
式中:k1、c1、c2为所设计的正数,Dα、D-β为分数阶微积分算子。虚拟控制量中加入分数阶微积分算子,可以加快系统响应速度,减小系统的稳态误差。
为防止微分爆炸,将虚拟控制量通过一阶低通滤波器,则:
(18)
(19)
式中:τ为时间常数,λ为滤波器输出。滤波误差为:
χ=λ-φ
(20)
整理上式可以得到:
(21)
定义Lyapunov函数V1为:
(22)
设计x2=e2+φ+χ。同时对V1求导,得:
(23)
定义Lyapunov函数V2为:
(24)
求导可以得到:
(25)
定义虚拟误差:
e2=x2-λ
(26)
定义Lyapunov函数V3为:
(27)
求导得:
(28)
则控制率可设计为:
(29)
式中:H为非线性干扰等不确定合集,本次设计使用RBF神经网络对其进行逼近补偿。
2.2 基于RBF的分数阶动态面控制器设计
RBF神经网络常使用梯度下降法训练神经网络权值。但该方法容易陷入局部最优且不能保证系统的稳定性。本次设计使用基于Lyapunov稳定性分析的自适应算法来在线调整神经网络的权值。
RBF神经网络算法为:
(30)
H*=W*Th(x)+ε
(31)
式中:x为神经网络输入,j表示隐含层节点个数,高斯基函数输出h=[hj]T,W*为网络理想权值,ε为逼近误差且小于等于最小逼近误差εN。

(32)

(33)
此时控制律为:
(34)
式中:η>0。
设计Lyapunov函数V4如下:
(35)
求导并代入控制律可得:
(36)
设计自适应率为:
(37)
式中:θ为正数,取η≥εN,则:
(38)
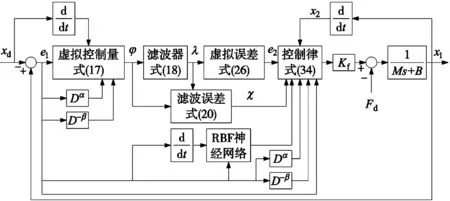
图1 基于RBF-FDSC控制器的PMLSM系统框图
3 仿真及结果分析
在MATLAB/Simulink中对RBF-FDSC控制器进行仿真,并于DSC与FDSC两种方法对比,验证其有效性。电机参数:M=8.2 kg,D=4 N·s/m,Kf=15.8 N/A,极距τ=32 mm,定子电阻R=2.5 Ω,磁链ψ=0.107 Wb,电感Ld=Lq=8.2 mH。
RBF-FDSC控制器参数为:k1=150,k2=38 500,c1=0.03,c2=0.01,α=0.1,β=0.2,时间常数τ=0.001;神经网络采用2-5-1结构,η=0.25,θ=1.95,cj=[-3,-1,0,1,3],bj=7。输入指令为0.06sin(πt) m。
图2为3种控制方法下的正弦轨迹跟踪图。图3为3种控制方法的跟踪误差图,其中DSC方法稳态后跟踪误差为±8.37 μm,0.083 s时跟踪误差收敛到0;FDSC方法稳态后跟踪误差为±6.01 μm,0.06 s跟踪误差收敛到0;RBF-FDSC方法稳态后跟踪误差为±4.16 μm,0.045 s跟踪误差收敛到0。相比于其他两种方法,RBF-FDSC方法下系统响应速度更快,控制精度更高。

图2 期望位置信号与轨迹跟踪图 图3 跟踪误差对比图
在2.25 s时,对系统突加80 N的外部扰动。图4为3种控制方法在突加扰动下的正弦轨迹跟踪图,可以看出,相比于其他两种方法,RBF-FDSC方法在扰动下能更快的恢复稳定状态,波动更小,抗干扰能力强。
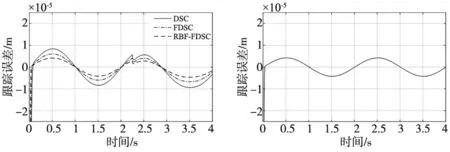
图4 扰动下跟踪误差对比图图5 参数变化下RBF-FDSC方法跟踪误差
电机参数M1=1.4,M=11.48 kg,D1=1.5,D=6 N·s/m,再次对RBF-FDSC控制方法进行仿真,跟踪误差如图5所示,跟踪误差为±4.24 μm。仿真结果表明,在参数变化下,系统仍可以稳定运行,跟踪效果良好。
4 结论
为提升PMLSM伺服系统在参数变化等不确定干扰情况下的位置跟踪性能,本文提出一种基于RBF神经网络的分数阶动态面控制方法。仿真结果表明,与传统动态面控制和分数阶动态面控制相比,所提方法具有更高的跟踪精度,更强的鲁棒性与更快的响应速度。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
农业机械学报(2020年2期)2020-03-09
电子制作(2019年19期)2019-11-23
环球慈善(2019年6期)2019-09-25
中华建设(2019年7期)2019-08-27
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
重型机械(2016年1期)2016-03-01