基于改进偏差耦合的多电机同步控制
2023-09-25 13:16苏石磊岳云涛
组合机床与自动化加工技术 2023年9期
苏石磊,岳云涛,刘 东
(1.北京建筑大学电气与信息工程学院,北京 100044;2.中冶京诚工程技术有限公司电气与自动化工程技术所,北京 100176)
0 引言
随着工业化和机械化程度的不断提高,多电机转速同步控制系统广泛应用于轧钢、机器人、高精度机床加工等现代化工业生产制造领域,其同步控制性能的好坏直接影响工业生产的稳定性及产品的质量[1-3]。由于异步电动机非线性、参数多、模型复杂等特点,增加了对电机的控制难度。目前90%的同步控制策略仍采用传统PID,在复杂的环境下系统同步控制精度低、稳定性差,适应能力弱[4]。因此,多电机转速同步控制系统具有极高的研究价值和广泛的应用前景。
近年来,国内外学者对多电机转速同步控制系统进行了多方面的研究,郗欣甫等[5]在控制器中引入人群搜索算法,解决了多电机系统在负载扰动影响下同步控制精度低的问题,但控制器的参数整定比较复杂。葛育晓等[6]通过改进积分滑模的控制方法,设计新型趋近率使系统状态量快速接近滑模面,提升了系统的响应速度,但其速度补偿环节仍采用传统方式,不能有效提升系统的同步能力。WANG等[7]通过协同速度控制器选择合适的控制参数,使得多电机系统的响应速度快、超调量小、稳健性好,但该模型较为复杂计算量比较大,导致系统响应时间较长。SHI等[8]增加了系统转速控制环节,使速度同步补偿器更简单计算复杂性降低,可在很大程度上解耦系统的速度同步和跟踪性能,增加调节系统性能的自由度,明显提高了多电机系统的同步性能,但该系统设计复杂不利于推广和应用。
偏差耦合控制结构作为一种多电机耦合控制结构主要是将被控电机转速与其他电机转速作差,然后把速度误差补偿到被控电机中,充分考虑了系统中所有电机的运行状态,具有很好的同步性能得到广泛应用[9]。在偏差耦合的基础上,电机难以兼顾系统的快速性、稳定性和同步性,因此需要结合现代智能控制方法来减小每台电机的跟踪误差,进而提升多台电机的同步性。
针对以上问题,为使多电机系统的同步性能有更大的提升,并且使系统能够快速稳定收敛,本文设计一种改进型多电机偏差耦合控制系统。以超扭曲滑模控制器实现电机转速的精确控制,抑制抖振现象,并缩短误差变量的收敛时间,保证系统的稳定性和快速收敛性,并通过李雅普诺夫方程证明其稳定性。其次在多电机系统中引入误差因子的概念,重新定义每台电机的速度补偿信号,充分考虑系统中所有电机的工作状态,减小同步误差,从而实现在发生负载突变的情况下,多电机系统仍具有良好的同步控制能力。
1 多电机转速同步控制系统
多电机转速同步控制系统以偏差耦合结构为基础,主要有转速环控制器、速度补偿器和多电机系统3部分组成[10]。传统多电机同步控制是将速度同步补偿信号实时反馈到每台电机的控制回路中,并通过速度控制器实现对电机转速的控制,结构框图如1所示。
图1中,ωref为电机给定转速,ω、TL和J分别是系统中所对应电机的实时转速、负载转矩和转动惯量,Kij为反馈增益系数,目的是弥补各电机转动惯量的不同[11],通常情况下Kij是系统中各电机转动惯量之比。
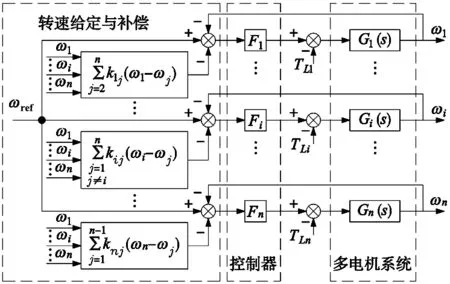
图1 传统型多电机同步控制结构图
在传统多电机控制系统中,转速控制器极易受到参数变化和负载扰动的影响,当负载突变时,无法快速消除电机转速波动和转速误差波动,使系统存在一定的延迟性,降低系统的同步控制精度。同时,在传统偏差耦合的速度同步补偿环节中,没有考虑其他电机的跟踪误差,当跟踪误差较大时,受控电机不能及时调整消除自身转速波动。因此,提出一种改进型多电机同步控制系统,如图2所示。
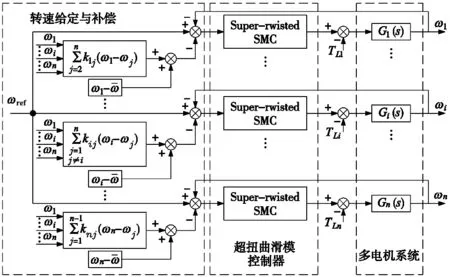
图2 改进型多电机同步控制结构图
将超扭曲非奇异滑模控制器代替普通速度控制器,使电机转速快速趋于稳定,增强抗干扰能力,加入误差因子速度补偿器更加充分地考虑到每台电机的转速,增强系统的耦合性。
2 改进型偏差耦合控制结构
2.1 超扭曲非奇异滑模控制器
以异步电机多轴传动系统为例,假设电机磁路是线性的,忽略电机损耗,电感的参数为常数,建立数学模型,则状态方程为:
(1)

为便于设计,定义状态变量:
(2)
将异步电机状态式(6)带入式(7)中得:
(3)
为使多电机同步控制系统具有良好的动态性能,设计超扭曲非奇异滑模控制器,可使得系统状态量到达平衡点的收敛速度更快,并削弱了抖振对系统的影响[12]。设计非奇异快速终端滑模面为:
(4)
式中:λ,γ>0为设计参数,g、h、p、q都为正奇数,并且满足1
p/q。
在滑模控制过程中,由于系统状态量在滑模面上不断切换进而产生抖振现象。超扭曲算法其实是一种高阶滑模控制方法,由于该算法将滑模变量隐藏在高阶导数内,可以有效削弱抖振现象产生[13]。
忽略外部扰动的影响,超扭曲算法非线性方程为:
(5)
式中:β=β(t)为系统状态变量,k1、k2分别为正实数。
通过超扭曲非线性方程,可得到趋近控制律为:
(6)
根据滑模到达平衡点的条件,并结合式(3)、式(4)和式(6),可得到速度控制器的控制律为:
(7)

2.2 误差因子速度补偿器
速度补偿环节是多电机转速同步控制中的关键环节,传统补偿方法只是由受控电机与系统中其他电机之间的转速差乘以增益系数相后累加得到。当系统中某一电机受到干扰后,这种干扰并没有在其他电机上所呈现。同时,没有考虑其他电机的跟踪误差,当跟踪误差较大时,受控电机不能及时做出调整来消除自身转速波动,造成系统中受控电机与其他电机的同步误差。
针对以上问题,设计了一种改进型的速度补偿器,引入误差因子概念,重新定义速度补偿信号,其结构如图3所示。
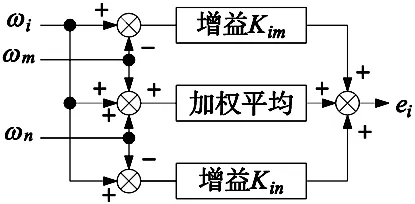
图3 误差因子速度补偿器结构图
本文将系统中电机实际转速的加权平均值作为参考转速。
(8)
(9)

将第i台电机的实际转速与参考转速之差作为误差因子:
(10)
式中:εi为第i台电机的误差因子。
那么,改进后的速度补偿信号就可以定义为:
ei=kim(ωi-ωm)+kin(ωi-ωn)+εi
(11)
当系统中任一电机受到干扰发生速度变化时,这种变化能迅速反馈给系统中的其他电机并采取相应的补偿,控制时延短,使得多电机同步系统具有良好的同步性能。
3 稳定性分析
为了验证设计算法的稳定性,选取李雅普诺夫函数:
(12)
对式(4)求导可得:
(13)
结合式(3)、式(7)可得:

(14)
对式(12)求导,并将式(4)、式(13)和式(14)带入可得:

(15)

当x2=0时,将式(7)带入式(3)中可得:
(16)

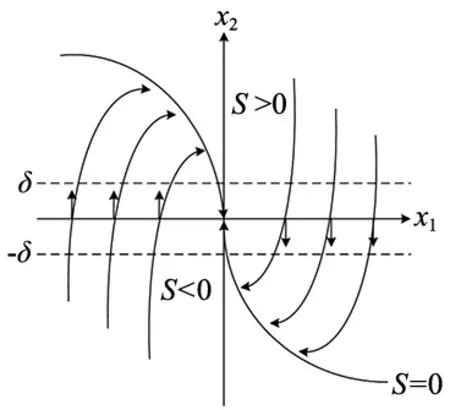
图4 控制系统相轨迹
在x2=0附近取一个δ(δ>0)邻域,当S>0时,轨迹线从x2<δ区域进入到x2≥-δ区域;当S<0时,轨迹线从x2>-δ区域进入到x2≤δ区域。因为x2≠0时满足滑模控制条件,所以可以得到,在x1-x2相平面内的点都可以在有限时间内到达滑模面S=0[14],证明所研究的控制器有较好稳定性。
4 仿真实验与分析
为了验证改进策略的可行性,在Simulink平台上构建3台异步电机同步控制模型,将传统型偏差耦合结构与改进型偏差耦合结构进行仿真对比。异步电动机参数如表1所示。

表1 异步电动机参数
对于系统中每台电机而言,超扭曲非奇异滑模控制器能够对电机转速快速控制,减小转速跟踪误差。以系统中1号电机为例,电机响应曲线如图5、图6所示。设置初始速度为1000 r/min,在0.3 s突加50 N·m负载扰动。普通滑模控制器在到达目标值附近出现波动,约0.22 s才达到稳态,存在抖振现象,而超扭曲非奇异滑模控制器的调节过程较为平稳,在0.15 s时达到给定转速,收敛速度较快,稳态时间缩短近33%,并削弱了抖振的影响。

图5 电机转速响应曲线 图6 电机转速跟踪误差曲线
突加负载扰动后,超扭曲非奇异滑模控制器对负载干扰有较强的抑制效果,转速波动较小,在0.03 s内快速恢复稳定状态,具有较强的转速跟踪性能。而普通滑模控制器约在0.04 s才实现稳定转速波动大,系统响应速度慢、跟踪性能差。
为了验证改进策略的可行性和有效性,将传统型偏差耦合控制方法与改进型偏差耦合控制方法相比较,如图7、图8所示。为了更好的检验多电机系统受扰动后的恢复能力,在0.3、0.5、0.7 s,依次对电机1,电机2、电机3突加TL=50 N·m的负载转矩。
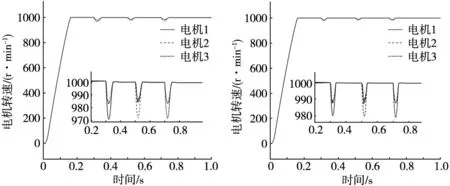
图7 传统型偏差耦合控制方法 图8 改进型偏差耦合控制方法
由图7可得出,在0.3 s对电机1突加负载干扰,转速大约跌落到970 r/min,电机2、电机3转速大约跌落到983 r/min,电机2、电机3之间存在微小的转速差。同时,在图7也可得出在0.5、0.7 s对电机2、电机3突加负载转矩后的情况与电机1类似。由图8可得出,在0.3 s对电机1突加负载转矩,转速大约跌落到980 r/min,电机2、电机3转速大约跌落到988 r/min,在0.5、0.7 s对电机2、电机3突加负载转矩后的情况也与电机1类似。结果表明改进型偏差耦合控制方法具有较高的转速跟踪性能,对负载扰动有良好的动态调节能力和较快的收敛性。
降低各电机之间转速同步误差,提高多电机同步运行时的稳定性,是多电机精密协调控制的关键,为了更加直观反映多电机系统的同步性能,本文将系统中各电机之间的同步误差作为研究对象。在0.3 s只对1号电机突加50 N·m负载转矩后,研究不同控制方式下3台电机的同步误差,如图9~图11所示。

图9 电机1与电机2同步误差 图10 电机1与电机3同步误差
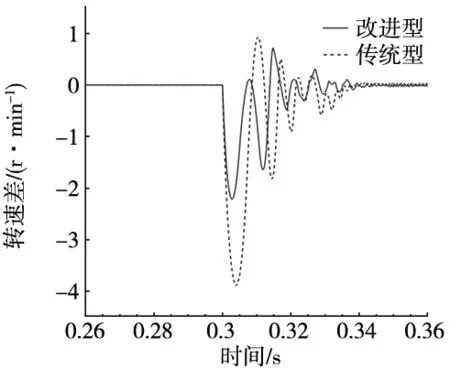
图11 电机2与电机3同步误差
在0.3 s突加负载后观察各电机之间的同步误差,如图9~图11所示,与传统型控制策略相比,改进型控制策略恢复到稳态的时间短,且在同步误差的峰值处缩小约40%。证明误差因子速度补偿器有效地增强了对系统的补偿能力,提升多电机转速同步控制性能。
综上所述,改进型偏差耦合控制方法与传统型偏差耦合控制方法相比较,跟踪性提高了约33%,同步性提高了约40%。
5 结论
针对多电机转速同步系统的动态响应速度慢和同步性能低的问题,在偏差耦合的基础上结合超扭曲非奇异滑模控制器与误差因子速度补偿器提出了一种改进型同步控制策略。
(1)通过超扭曲非奇异滑模控制器对电机转速快速进行控制,有效削弱了抖振对系统的影响,且不存在静态误差。
(2)引入误差因子速度补偿器,增强速度补偿环节的补偿能力,当系统受到负载干扰时改进型控制策略仍能够使系统中各电机转速快速准确的恢复到给定值,减小跟踪误差和同步误差的波动。
(3)通过仿真实验表明,新型控制策略的跟踪性提高了约33%,同步性提高了约40%,使得多电机系统具有更好的同步控制精度和鲁棒性。
猜你喜欢
一重技术(2021年5期)2022-01-18
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
制造技术与机床(2017年2期)2017-05-04
电机与控制应用(2015年2期)2015-03-01
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
电测与仪表(2014年13期)2014-04-04