
工业机器人关节轨迹预定义时间滑模跟踪控制*
2023-09-25 13:16:08刘宜成杨海鑫
组合机床与自动化加工技术 2023年9期
刘宜成,杨海鑫,严 文
(四川大学电气工程学院,成都 610065)
0 引言
工业机器人作为智能制造中的核心装备之一,其轨迹跟踪控制性能正得到越来越多的重视[1]。工业机器人轨迹跟踪控制通常是在关节空间中进行的[2],即先通过关节空间轨迹规划,得到关节运动轨迹,再利用轨迹跟踪控制器与驱动电路,驱动关节电机实现对机器人关节的轨迹跟踪控制。因此,提高关节轨迹跟踪控制的性能,对实现工业机器人高精度轨迹跟踪控制有着重要的意义[3]。
滑模控制是一种能够使系统状态沿着所设计的滑模面进行运动的控制器,相较于传统PID等控制器,滑模控制器具有鲁棒性强的优点[4]。然而传统滑模控制器只能实现误差渐近收敛,其收敛时间趋于无穷[5],对工业机器人关节轨迹跟踪性能提升较小。针对这一问题,很多专家学者开展了广泛研究。王朝阳等[6]使用非奇异终端滑模和位置前馈相结合的控制方法,提高了轨迹跟踪精度,并能够保证跟踪误差在有限时间内收敛到零,但是不同的初始状态对收敛速度有着显著的影响。何欣荣等[7]利用固定时间稳定理论,设计了固定时间滑模控制器,能够确保在不同的初始状态下,跟踪误差都能够在一个固定时间内完成收敛,但是该算法参数较多,且控制器不显含时间上界,时间上界计算复杂,不利于工程应用。JUAN等[8]提出了一种预定义时间收敛的滑模面,将收敛时间显含在滑模面中,即预先定义了收敛时间,使用Lyapunov方法证明了滑模面的预定义时间收敛特性。MUNOZ等[9]将预定义时间滑模应用到机械臂控制中,仿真实现了机械臂的预定义时间轨迹跟踪控制,但是该控制器含有分数指数运算,运算较为复杂,不利于实时控制器实现。
本文使用反正切函数作为非线性项,设计了一种新型预定义时间滑模面。相较于现有的预定义时间滑模面,本文所设计的预定义时间滑模面减少了滑模参数数量,降低了运算复杂程度,并确保了滑模面的非奇异性。同时,使用该新型滑模面设计了工业机器人关节轨迹跟踪控制器,并进行实验验证。相较于传统PI控制器和指数趋近律滑模控制器,本文所设计的控制器收敛速度更快,能够实现预定义时间收敛的高精度关节轨迹跟踪控制。
1 工业机器人关节驱动系统模型
工业机器人的旋转关节通常使用小体积、轻量化、节能高效的永磁同步电机作为驱动装置。为了实现高效、平稳传动,通常会使用减速机来增大永磁同步电机产生的转矩,并降低关节转速[10]。工业机器人的关节电机传动链如图1所示。
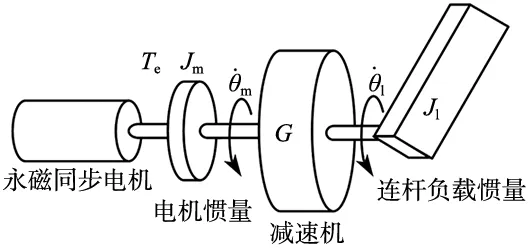
图1 工业机器人关节传动链示意图
图中的工业机器人关节传动链有如下的转矩平衡关系:
(1)
式中:Jm和JL分别为电机转子惯量和连杆负载惯量,θm和θL分别为电机转子角度和关节连杆角度,τe为永磁同步电机产生的电磁转矩,G为减速器减速比,τd为包含摩擦、外部扰动的总扰动转矩,存在常数D,使得|τd|≤D。
根据式(1),从电机端看,电机转子和关节连杆传动系统的总惯量为:
(2)
式(2)所表示的惯量也被称为有效惯量。可以看出,由于减速器的存在,大幅削弱了连杆运动对有效惯量的影响,因此当减速比较大时,可将式(1)近似为[11]:
(3)
根据式(3),可写出工业机器人关节永磁同步电机的运动方程和转矩方程:
(4)
式中:Kt为永磁同步电机的转矩常数,iq为在dq坐标系中,永磁同步电机q轴电流。该式为工业机器人关节驱动系统的基本运动模型,后续将基于此模型进行控制器设计。
2 预定义时间收敛理论
考虑如下平衡点为原点的系统:
(5)
式中:x(t)是系统的状态变量,f(x(t))是一个连续函数,且有f(0)=0。
定义1[12]:假设系统为全局渐近稳定系统,若该系统能够在一个有限时间Tc(x(0))内收敛到平衡点,即当时间t≥Tc时,x(t)=0,则该系统为全局有限时间稳定系统。收敛时间Tc受系统初始状态影响。
定义2[13]:假设系统为全局有限时间稳定系统,若收敛时间Tc存在一个与系统初始状态无关的上界值,则该系统为全局固定时间稳定系统。
定义3[8]:假设系统为全局固定时间稳定系统,若状态收敛时间Tc有最小上界,且显含于函数f(x(t))中,该则系统为全局预定义时间稳定系统。
下述引理是系统能够实现全局预定义时间收敛的充要条件。
引理1[14]:针对如下系统:
(6)
式中:0
(1)g(x)在(0,+∞)范围内是连续的,并满足g(0)=0;

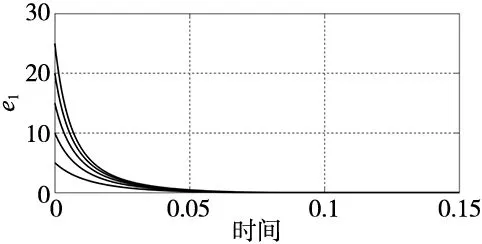
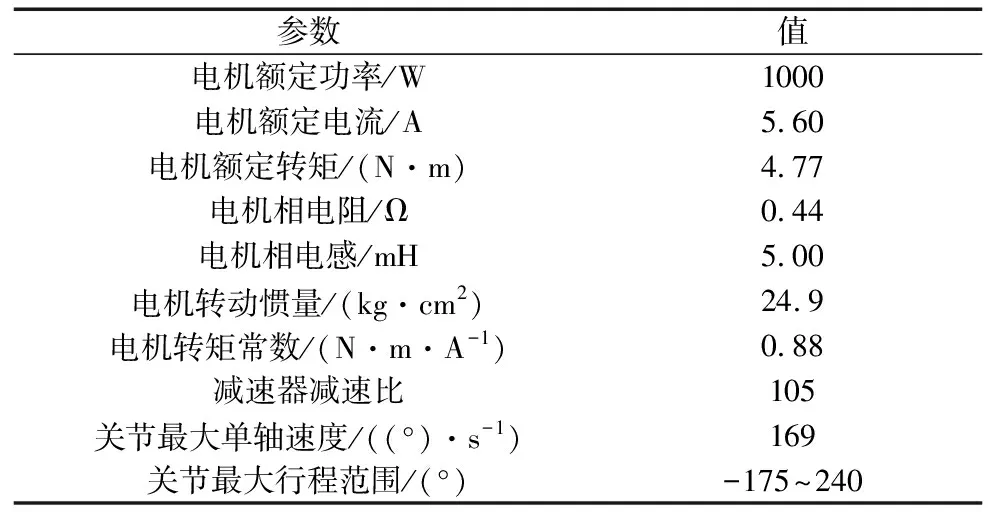
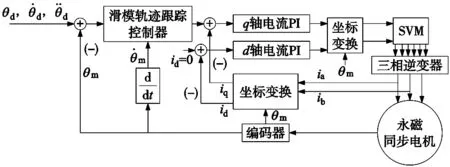
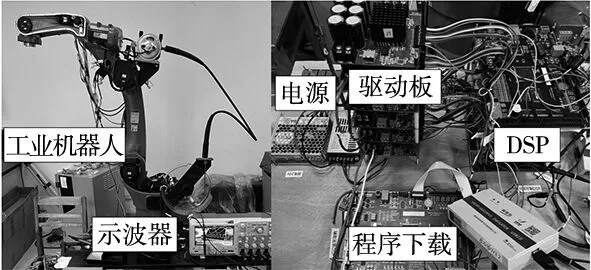
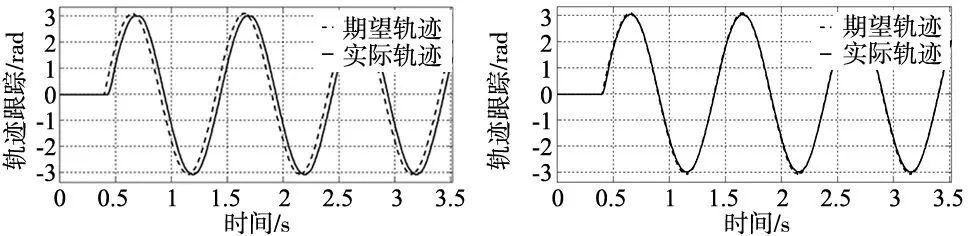
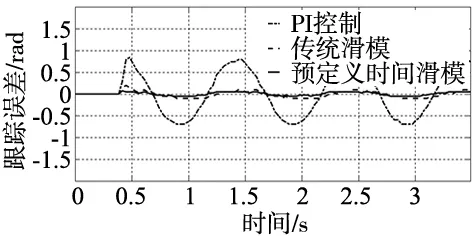
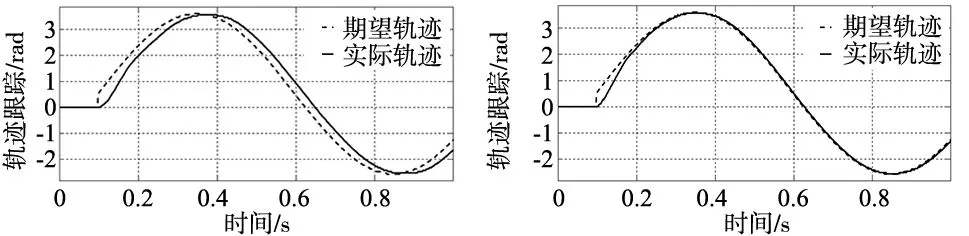
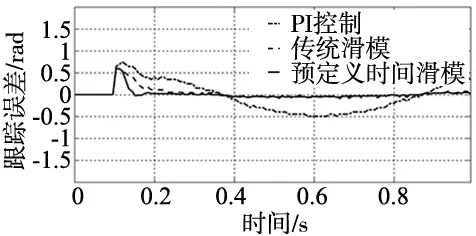
T (7) 引理2[15]:对于一个全局正定的Lyapunov函数V(x)=|x|,若该Lyapunov函数的导数满足: (8) 式中:m、Tc和g(xm)的定义与引理1中一致,c为一个常数。则系统状态x将在预定义时间Tc内,收敛到原点附近小领域内。满足式(8)的系统被称为实际预定义时间稳定系统。 在实际控制系统中,由于建模误差、采样延迟等因素,无法实现精准收敛到原点的预定义时间控制[15],只能实现收敛到原点附近小邻域的实际预定义时间收敛。 为了让机器人关节电机位置θm能够跟踪上期望轨迹θd,定义位置和速度轨迹跟踪误差为: (9) 根据由式 所描述的工业机器人关节驱动系统,可写出跟踪误差的状态方程为: (10) 式中:系数b=Kt/Jm,扰动项d=τd/Jm,控制律u=iq,该控制律的值也为内部电流环的给定值。 选取有界非线性函数: (11) 该函数满足引理1中所有条件,且其导数形式简单,有利于降低控制器复杂程度。利用该函数设计新型滑模面: (12) 式中:Tc是预定义时间参数,可设置为任意正实数;m为一个正实数,sgn(·)为符号函数,其定义为: (13) 对滑模面求导可得: (14) 为了满足预定义时间稳定性,并避免滑模面导数出现奇异性问题,指数m的选取需要满足下式: (15) 设计控制律u为: (16) 式中:k=D/Jm代表扰动项的上界值,为一个已知量。 定理1:对于系统,当选用如式(12)所示的滑模面函数和式(16)所示的控制律时,系统为全局实际预定义时间稳定系统,系统状态能够在预定义时间Tc内收敛到原点附近小邻域内。 证明:在滑模控制下的系统状态分为两个阶段:趋近阶段和滑模运动阶段[4]。分别对这两个阶段所用时间进行分析。 首先,针对趋近阶段,选取全局正定Lyapunov函数: V(s)=|s| (17) 结合式(14)和式(16)可推导出V(s)的导数: (18) 根据引理2,滑模面s为实际预定义时间稳定,其收敛时间,即趋近阶段所用时间T1满足: T1 (19) 然后,当滑模面s完成收敛后,即s=0时,进入滑模运动阶段,根据式 有: (20) 根据引理1,系统状态e1能够实现预定义时间内收敛,因此滑模运动阶段的时间T2满足: T2 (21) 综上所述,在滑模面(12)和控制律(16)的作用下,系统(10)的状态能够在预定义时间内完成收敛,其总收敛时间T3为: T3=T2+T1<2Tc (22) 为了减小滑模抖振,采用饱和函数sat(·)替换符号函数sgn(·),饱和函数的定义为: (23) 使用MATLAB对上文所设计的预定义时间收敛滑模控制器进行仿真分析。设置收敛时间参数Tc=0.05 s,将状态变量e1初始值分别设置为5,10,15,20,25,通过仿真验证其预定义时间收敛特性。由图2所示的仿真结果可以看出,该滑模控制器能够保证在不同的初始状态下,系统状态在预定义时间2Tc内完成收敛,与理论一致。 图2 不同初始状态下的e1预定义时间收敛(Tc=0.05) 为了验证本文所设计的关节轨迹跟踪控制器的有效性,在工业机器人实验平台上进行实验,控制系统框图如图3所示,实验平台如图4所示。控制器采用TI的DSP芯片TMS320F28377D,通过DAC将实验数据输出并存储到示波器。以工业机器人的第3关节为受控对象,进行关节轨迹跟踪控制实验,关节机电参数如表1所示。 表1 第3关节机电参数 图3 滑模关节轨迹跟踪控制系统框图 图4 工业机器人实验平台 首先进行无初始误差时的关节轨迹跟踪实验。设定参考轨迹为θd=3sin(2πt),设置收敛时间Tc=0.02 s,扰动项上界值k=2000。分别使用PI控制器、指数趋近律滑模控制器、本文所设计的预定义时间滑模控制器,进行轨迹跟踪控制实验。轨迹跟踪曲线和跟踪误差曲线分别如图5和图6所示。 (a) PI控制器正弦轨迹跟踪 (b) 指数趋近律滑模控制器正弦轨迹跟踪 图6 无初始误差时的正弦轨迹跟踪误差 由图5和图6可以看出,在没有初始误差的情况下,PI控制器由于带宽受限,跟踪性能较差。由于两种滑模面在初始时刻都处于原点s=0,故指数趋近律滑模控制器与本文所设计的预定义时间滑模控制器都有着较好的动态性能。在控制精度上,滑模控制器均优于普通PI控制器,指数趋近律滑模控制器的跟踪误差最大值为0.1 rad,而预定义时间滑模控制器的跟踪误差最大值为0.05 rad,可见,本文所设计的控制器控制精度更高。 在实际的工业机器人控制中,通常会由于外部负载扰动、环境电磁干扰、编码器延时等问题,导致轨迹跟踪存在小范围内的初始误差。设定存在0.5 rad偏移的参考轨迹θd=3sin(2πt)+0.5,再次进行轨迹跟踪控制实验。轨迹跟踪曲线和跟踪误差曲线分别如图7和图8所示。 (a) PI控制器正弦轨迹跟踪 (b) 指数趋近律滑模控制器正弦轨迹跟踪 图8 存在初始误差时的正弦轨迹跟踪误差 由图7和图8可以看出,在存在初始误差的情况下,预定义时间滑模控制器和指数趋近律滑模控制器都能够取得较高的跟踪精度,跟踪误差均小于0.05 rad。但是预定义时间滑模控制器收敛速度更快,能够在预先设置的2Tc时间内完成收敛,验证了该控制器的预定义时间收敛特性。 本文首先根据预定义时间收敛理论,设计了工业机器人新型预定义时间滑模关节轨迹跟踪控制器,该控制器有着非奇异、运算简单和易于工程实现的优点;然后,通过Lyapunov方法证明了该控制器的预定义时间收敛特性,并进行仿真验证;最后,在工业机器人实验平台上进行实验,结果表明,该控制器能够实现工业机器人关节高精度轨迹跟踪控制,且跟踪误差能够预定义时间收敛,克服了传统滑模控制器收敛速度受初始状态影响较大的问题。由于收敛时间可控,该控制器还可用于提升工业机器人关节同步性,后续将对该控制器在提升工业机器人关节同步性方面开展相关研究。3 工业机器人关节轨迹跟踪控制器设计

4 实验分析
5 结论
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04中国惯性技术学报(2019年6期)2019-03-04 09:50:06测控技术(2018年4期)2018-11-25 09:47:26测控技术(2018年3期)2018-11-25 09:45:40现代装饰(2018年5期)2018-05-26 09:09:39中国三峡(2017年2期)2017-06-09 08:15:29筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05自动化博览(2014年9期)2014-02-28 22:33:17自动化博览(2014年4期)2014-02-28 22:31:15
