
小型植保无人机下洗气流场影响雾滴运动特性规律研究
2023-09-23 03:47张智泓曾荣壕赖庆辉申思雨
农业机械学报 2023年9期
张智泓 曾荣壕 赖庆辉 袁 烁 申思雨 杨 乐
(昆明理工大学现代农业工程学院,昆明 650500)
0 引言
西南丘陵地区的农业生产以高山农业为主,其中小型植保无人机因其较强的适应性和灵活性得到了广泛推广[1-2]。然而,在植保无人机作业过程中,其所处的空间环境相对于地面环境更为复杂,因此雾滴沉积问题也更加严重[3]。雾滴受喷洒参数和自然风场影响,容易发生弥漫、蒸发和漂移,从而影响喷雾效果[4-5]。研究植保无人机作业时雾滴沉积问题,对于优化植保无人机的喷雾效果和提高作业质量及效率具有重大意义[6]。
针对植保无人机下洗气流场作用下的雾滴沉积,国内外已开展了一系列研究。例如,BILANIN等[7]和RAFFEL等[8]通过运用AGDISP软件预测直升机喷药时的颗粒运动轨迹,为直升机风场模型奠定了理论基础。KIRK等[9]研究了无人机在不同工作参数下的雾滴沉积效果,并在恒定高度下确定了飞行速度和施药剂量的最优参数,为实际作业提供了技术支持。然而,目前国外的研究主要关注直升机和固定翼飞机[10];而国内学者则主要采用流体力学方法研究无人机工作参数对风场和雾场特性的影响。例如,兰玉彬团队[11-14]通过数值模拟证实植保无人机作业参数对雾滴漂移和沉积具有直接影响,确定了不同类型无人机的最佳作业参数。张健等[15]研究了环境风速对无人机雾滴沉积的影响,进而确定了无人机的作业参数。王玲等[16-17]则证实了玻尔兹曼数值模拟方法能够有效地模拟植保无人机飞行过程中的非定常流动。张京等[18]利用红外热成像技术对水稻沉积规律进行验证,确定直升机航空作业最佳参数。
为了深入探讨小型植保无人机下洗气流场与雾滴沉积之间的关系,本文采用N-S方程、realizablek-ε模型和SIMPLE算法对无人机下洗气流场以及雾滴离散运动进行数值模拟。并通过与风场测速试验结果对比,验证模型的可靠性,进一步揭示下洗气流场对雾滴沉积的影响规律。
1 无人机功能验证
1.1 材料和设备
如图1所示,本研究采用昆明理工大学现代农业装备实验室自研的四旋翼无人机,其主要参数如表1所示。无人机喷雾系统主要由储水箱、水泵、水管、离心喷头以及电磁控制阀组等部件组成。喷嘴位于无人机正下方,垂直于无人机的飞行轴线。
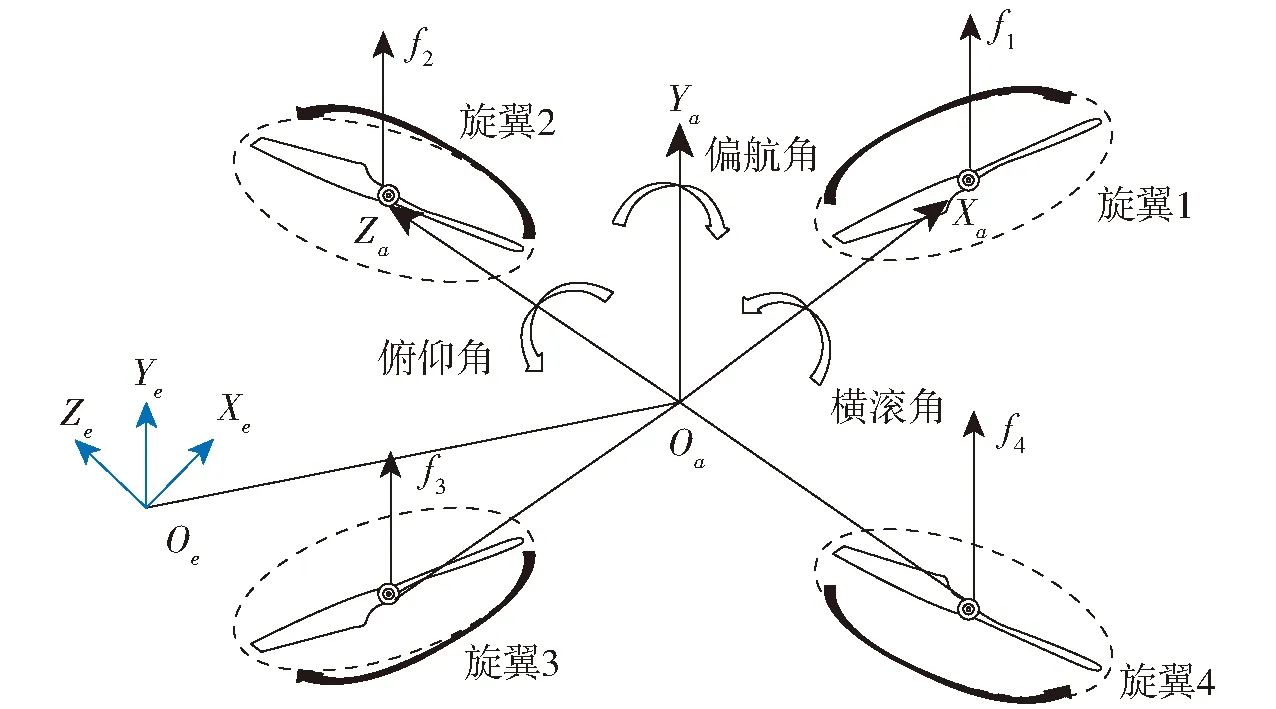
图1 四旋翼系统运动示意图
1.2 无人机飞控功能设计与验证
1.2.1四旋翼植保无人机工作原理
本研究以小型四旋翼无人机为对象,其运动系统如图1所示。旋翼以90°间隔、半径为230 mm的圆形布局。图1中OaXaYaZa表示四旋翼系统的自身坐标系,OeXeYeZe表示绝对坐标系,f1、f2、f3和f4分别代表4个旋翼旋转时产生的升力。多旋翼无人机通过调整各旋翼下方旋转电机的转速产生不同的升力,依据相应的横滚角、偏航角和俯仰角进行姿态调整,从而使其能够承载自重进行飞行。本研究主要探索无人机下洗气流场对雾滴沉积的影响,因此假设各个电机的转速一致,旋翼分为互为对称的两部分,旋翼1和旋翼3为顺时针旋转,旋翼2和旋翼4为逆时针旋转。
1.2.2四旋翼植保无人机升力验证
本研究针对多旋翼植保无人机性能进行开发,采用了大疆创新科技有限公司NAZA-M LITE飞控系统,旋翼使用该企业9450螺旋桨。计算得到各旋翼升力
(1)
式中fi——旋翼产生的升力,N
CL——升力系数
ρ——空气密度,kg/m3
vL——旋翼转速,r/s
S——旋翼面积,m2
根据图2所示的力臂关系求出无人机的总升力[19]。
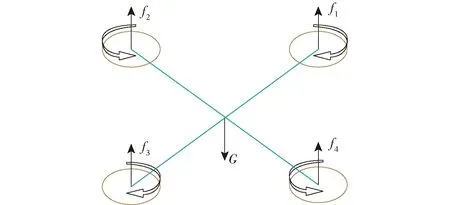
图2 旋翼力臂关系图
2 旋翼下洗气流场仿真
2.1 数值模拟模型选择
下洗气流场被定义为低速可压缩湍流[20]。尽管Fluent内置的大多数湍流模型为低速不可压缩模型,但大量案例表明,Fluent中的湍流模型能够较为准确地代替可压缩湍流模型进行数值模拟[21]。由于数值模拟过程中涉及对下洗气流场的计算,选用更适合大剪切流体流动以及检测并模拟圆孔射流的realizablek-ε模型。
2.2 建模与计算区域的界定
为了减少计算量,本文对植保无人机模型进行了结构简化,去除了结构连接处的孔位。由于旋翼为复杂曲面,为确保仿真的可靠性,需要对旋翼进行结构提取。采用先临三维科技股份有限公司EinScan-SP型三维扫描仪进行三维建模(图3),使用EXScan 5软件进行逆向建模后,在SolidWorks中完成建模,如图4所示。

图3 三维扫描仪

图4 9450螺旋桨三维模型
为确保数值模拟的准确性,本文采用有限体积法[22],将计算域定义为一个3 m×3 m×2 m的长方体,并将其划分为5个区域。动域网格被雾场区域网格包裹,各区域网格之间的交界面通过interface连接。动域由4个半径为15 mm、高10 mm的圆柱体构成,这些圆柱体包覆着旋翼。网格模拟总计有7.54×106个网格,动域网格数量为1.74×106个。对动域中的4个旋翼的接触面以及雾场区喷嘴接触面的网格添加5层膨胀层处理,使用refinement指令加密并优化网格模型,以提高非结构性网格的精度。四旋翼小型植保无人机数值模拟的边界条件类型设置如下:雾场域的底面设置为“wall”,沉积区域离散相设置为“trap”;壁面为飘逸区域,将该墙面设置为压力出口“pressure-outlet”,沉积区域离散相设置为“escape”;动域网格设置采用滑移网格法“mesh action”,使其绕着圆柱体的中心轴旋转。
2.3 数值模拟计算理论方法
为探索下洗气流场对空气场从相对静止状态到运动状态过程的影响,以及流体与固体界壁间相对运动时的相互作用和流动规律,采用计算机数值模拟方法求解流体流动控制偏微分方程组,通过得到的流场及其他物理场相结合,研究流体流动现象。采用雷诺平均方程(RANS)作为基本控制方程。如图1所示,将坐标系与旋翼连接在一起的结构称为运动坐标系。在该坐标系下的雷诺平均方程中,为了考虑旋转带来的影响,添加了源项Q。该源项包含了无法直接参与控制方程的非稳态项、对流项和扩散项,具体方程表现形式为[23]

(2)
其中
式中W——守恒变量矢量
S——单元的法向面积,m2
F(W)、G(W)——无黏通量、黏性通量
p——压强,Pa
u、v、w——流体速度的3个方向分量,m/s
E——单位流体内能,J/(kg·K)
V——流体计算域体积,m3
Ω——旋翼旋转速度,m/s
qn、qb——流体速度和网格运动速度沿网格面法向的分量
t——时间,s
τxx、τxy、τxz、τyx、τyy、τyz、τzx、τzy、τzz、φx、φy、φz为黏性项。
2.4 离散相运动方程
在植保作业中,雾滴受施药参数和自然风场的影响,会发生弥漫、蒸发和漂移现象。在本文的数值模拟研究中,为了便于建立液滴运动的数学模型,假设雾滴为球形粒子,并忽略液滴在空气中运动过程中的蒸发和变形现象。雾滴在模拟区域内的沉积受到多种外力影响,包括重力场、虚拟质量力[24]、萨夫曼升力[25]和气压梯度力[26]等约束。根据牛顿运动方程,雾滴在受气流影响下的离散运动方程可表示为[27]
(3)
(4)
(5)
(6)
(7)
(8)
(9)
式中mp——雾滴质量,g
dp——雾滴直径,μm
ρp——雾滴密度,kg/m3
vpj——雾滴在j(x、y、z)方向的速度矢量,m/s
vpi——第i个雾滴速度矢量,m/s
ρf——空气摩擦阻力系数,取9.8 N·s2/m4
vfj——气流在j(x、y、z)方向的速度矢量,m/s
μf——动力粘滞系数,Pa·s
FD——黏性力系数
Cd——阻力系数
Re——相对于流场运动的雷诺数
FM——流体与雾滴颗粒相互冲击产生的力,N
FP——压力梯度力产生的作用力,N
ei——方向矢量μ——黏性系数
由旋翼旋转产生的气流不仅影响喷雾颗粒的运动,而且对大气场也有影响。然而,大气场对该流体存在负反馈作用,会减弱喷雾颗粒的运动效果,而喷雾颗粒与流场之间存在动量交换。基于N-S方程,将式(2)拆解为5个等式:第1个等式为质量守恒方程;第2~4个等式基于动量守恒原理;第5个等式基于能量守恒原理。式(3)~(9)基于欧拉-拉格朗日定理对离散相运动方程进行求解。假设流体计算域V内,在时刻k共有Z个雾滴,将所有雾滴颗粒对流场产生的动量总和[28-29],以源项Q的形式存在,有
(10)
并且因为在不同的时刻,液滴的速度是不同的,它所受到的力是不一样的。因此,液滴的运动模型是可变加速的。运动模型是可变加速的,液滴的三维加速模型为
(11)
其中
vpj(k+1)=vpj(k)+αpj(k)Δt
(12)
式中SMi——雾滴颗粒对流场产生的动量和
Fdi——第i个雾滴的黏性力,N
FMi——第i个雾滴与流体相互冲击产生的力,N
Fpi——下洗气流场下压强差对第i个雾滴产生的力,N
αpj(k+1)——雾滴在k+1时刻、j(x、y、z)方向的加速度,m/s2
vpj(k+1)——雾滴在k+1时刻、j(x、y、z)方向的速度,m/s
Ce——漂移修正系数
3 下洗气流场特性分析与验证
3.1 下洗气流场空间特性分析
当雾滴粒径小于200 μm时,雾滴的运动范围主要分布在下洗区域的中心[30]。本文采用的离心式雾化喷头的雾化效果在90~130 μm范围内[31],雾滴沉积效果主要集中于下洗气流场。在本研究中,假定空气为理想空气,雾滴假设为球形粒子,并忽略了液滴在空气运动过程中的蒸发与变形现象。下洗气流场对雾滴颗粒的沉积以及雾滴飘逸量具有重要意义。为了研究颗粒受气流下洗作用后的空间分布,本研究将计算域界定为3 m×3 m×2 m的长方体,大气场的温度界定为25℃,相对湿度设置为66%,大气压强设置为79.7 kPa,其余参数默认为标准大气参数。无人机位于正中心点,距地面高度为1.5 m,旋翼转速为100 r/s进行模拟仿真,并选取了图5中旋翼下方的7个等高线平面进行数据提取,分别位于0、0.25、0.50、0.75、1.00、1.25、1.50 m。
图5 旋翼下方云图平面
将无人机正下方区域按图6所示进行划分,即1个中心区、2个系统引入区、2个气流导出区、4个旋翼区。图7展示了旋翼下方7个切面的速度云图。在图7a中,距离旋翼下方0 m时,动域处的风速最大,但下洗气流对下方空气的渗透范围主要集中在半径为0.4 m的圆内的中心区域。在图7b、7c中,当离旋翼高度在0.25~0.50 m时,受喷药装置的影响,下洗气流无法穿透机构,导致中心区域出现速度空白区,呈现绕流现象。此时,3~10 m/s的高速洗气流主要集中在气流引入区和导出区。图7d~7f显示,在2.5~10 m/s范围内,速度流线集中于中心位置的1.2 m×0.8 m长方形区域,位于旋翼正下方。
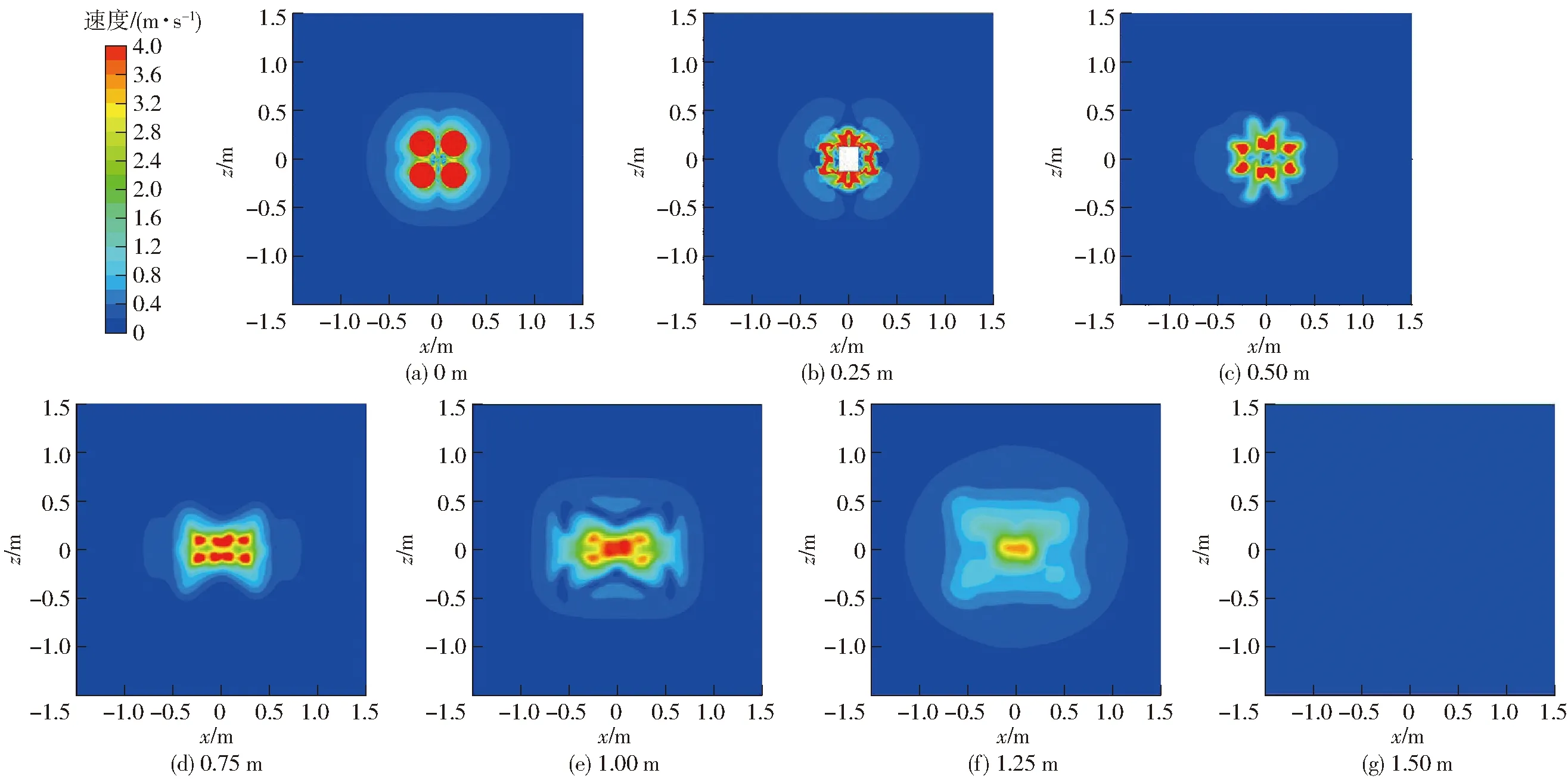
图7 旋翼下洗气流场切片速度分布图
结合图8和图9,下洗气流在离旋翼下方0.25 m处受到无人机喷药机构阻挡下的绕流影响后,在离旋翼下方0.6 m处呈现向中心汇聚的现象。此外,旋翼作用下的气流运动至地面时与地面涡流相互作用,导致中心区域风速呈现稳步上升趋势,在距离旋翼1 m处的正中心区域达到速度峰值3.82 m/s。通过观察图7d、7f、7g可以发现下洗气流的速度场随着离旋翼高度的增大而扩大,流线速度逐渐减小[32]。在图7g中,靠近地面时,风场速度减小至零。下洗气流的特性随着离旋翼高度的变化而呈现出不同的表现。
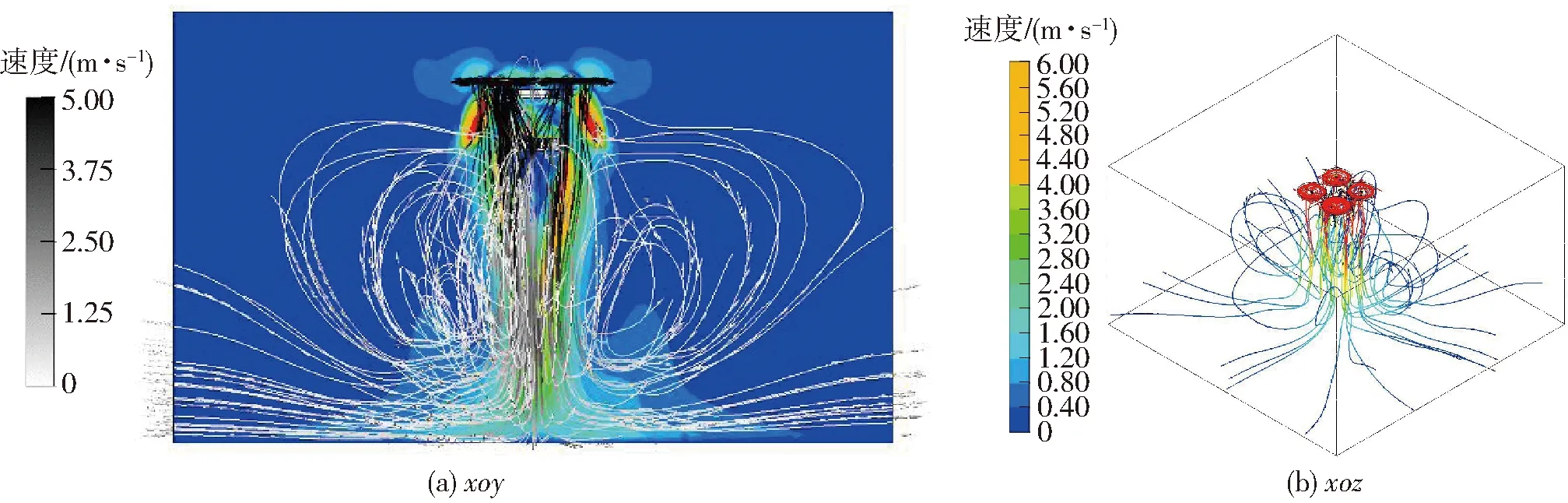
图8 速度流线图
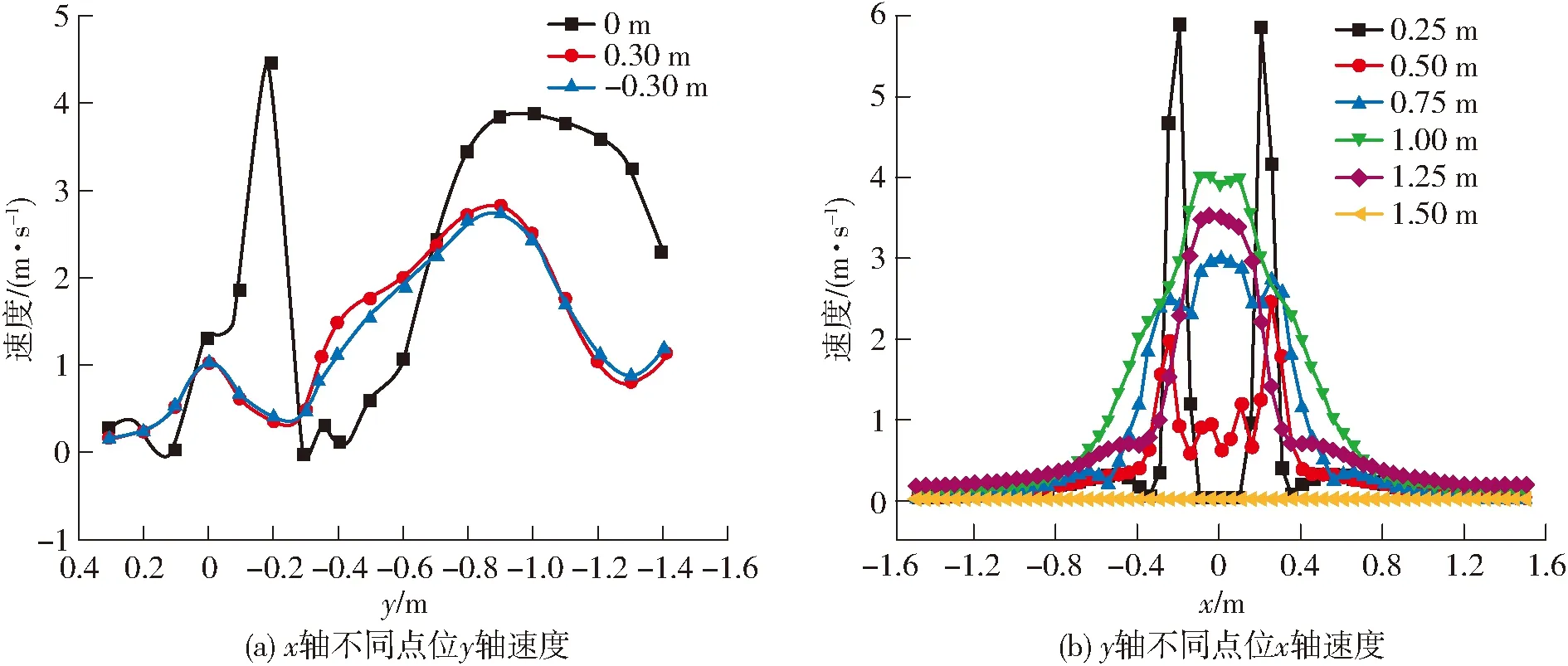
图9 不同区域风速变化曲线
3.2 下洗气流场风速验证试验
小型四旋翼植保无人机的下洗气流场是影响植保无人机施药作业的主要因素之一。为了研究无人机下洗气流场对雾滴沉积特性的影响,需要确保实际风场数值与数值模拟风速相匹配。本文首先进行数值模拟,确定风场范围,避免冗余数据采集。测点分布情况如图10a所示。其中,“旋翼下方区”测量点位于旋翼中心下方,其他区域的测量点布置在该区域的下方。竖直方向上,两相邻测速点的距离为10 cm。图10c所使用的AT816型风速仪,为SMART SENSOR公司生产,测量范围为0.3~30.0 m/s,测量精度为±5%。将AT816固定在可伸缩三脚架上,叶轮与地面平齐放置,确保风速仪的迎风面朝上,如图10b所示。旋翼转速稳定后,将测速台架移至图10a的测量点处进行测速。每个测量点测速1 s,重复3次并取平均值。通过数值模拟和试验获得测速点风速数据,数值模拟风速与试验结果的相对误差可以表示为
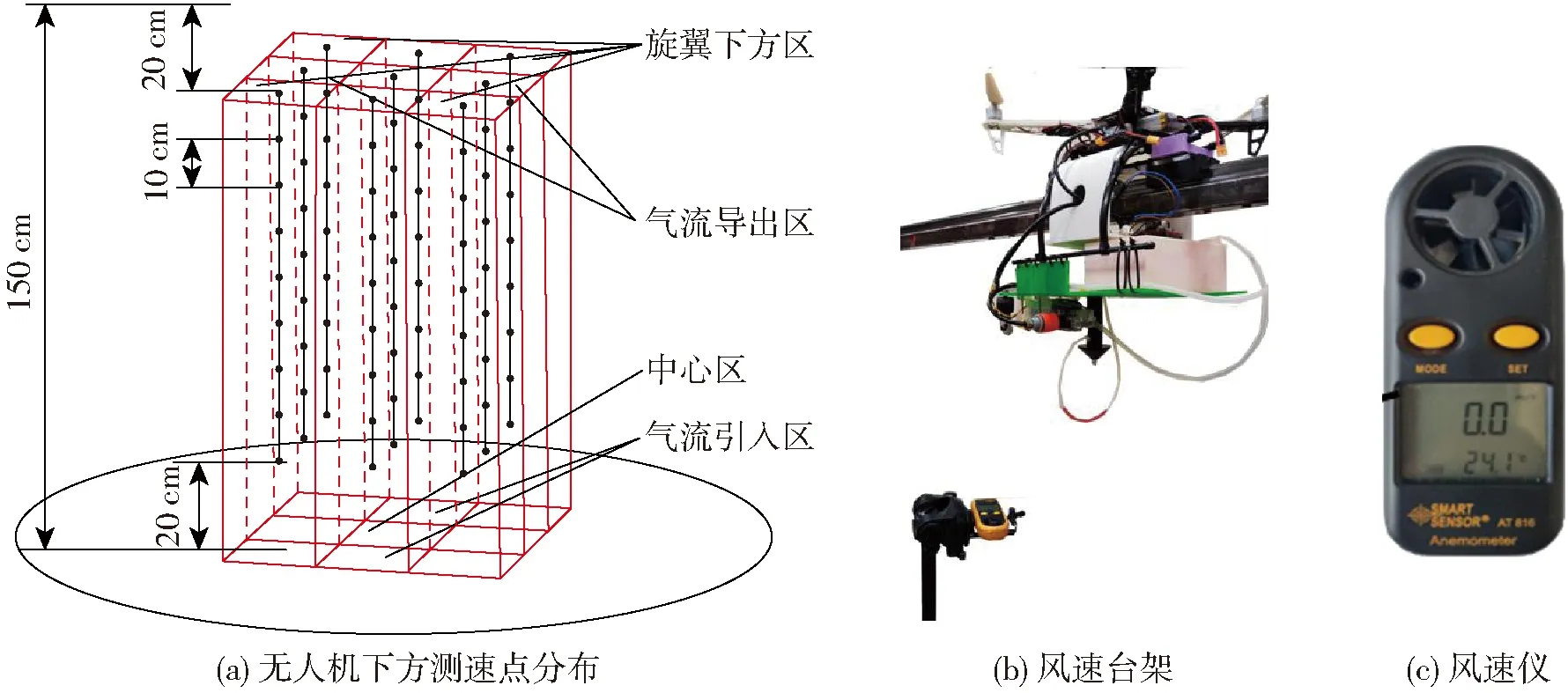
图10 测风试验
(13)
式中vs——数值模拟风速,m/s
vt——试验风速,m/s
根据图11所示,模拟值与试验值的趋势基本一致。然而,模拟值与试验值之间的差异来源于风速仪精度较低导致实测值失真。具体数值差异如图11所示,在距离旋翼1.0~1.2 m的测速点,试验值大部分小于模拟值(平均绝对误差约为16.77%),而在其他测速点,试验值基本大于模拟值(平均绝对误差约为15.85%)。通过对比分析,试验值相对于模拟值偏大的原因主要如下:首先,在靠近旋翼的测速点,由旋翼旋转产生的复合风场,试验值比模拟值更大;其次,在靠近地面的测速点,由于地面涡流效应形成对流,试验值也较模拟值大。然而,由于空气阻力等外部环境条件的影响,距离旋翼1.0~1.2 m的实测值小于模拟值。在图11c中,距离旋翼0.4 m处的模拟值风场速度为0 m/s。这一现象的原因在于试验平台与模型存在差异。为了提高计算效率,数值模拟模型简化了载物平台的结构,在模拟计算中,该点处无流体域(简化为实体平台),因此模拟值为0。通过分析误差来源,可找到试验值相对于模拟值偏大的原因,并验证了该风场模型的可靠性。
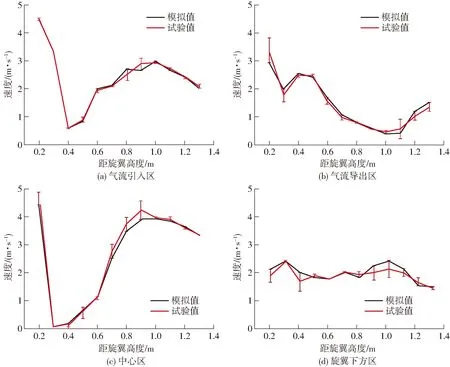
图11 下洗气流场速度模拟值与试验值
4 下洗气流场对雾滴运动分布的影响
本文选用的喷嘴为离心雾化喷嘴,喷嘴喷雾角为140°,喷嘴流量为0.4 L/min,喷雾颗粒大小为90~130 μm。喷嘴位置设置在距离旋翼垂直位置300 mm的正中心处。采用离散随机模型(DPM)模拟颗粒在空气中的离散运动,待雾滴在下洗气流场作用下的沉积规律趋于稳定时停止计算。图7、12展示了雾滴在下洗气流场沉积切面规律。一方面,药液通过离心雾化喷嘴的雾化盘高速旋转,通过锯齿端面喷出形成雾滴,具有沿锯齿端面向的初始速度。另一方面,旋翼高速旋转产生的下洗气流场对雾滴具有向下的作用力以及绕下洗气流场中心的旋转运动,形成一个复合工况。如图12a~12c所示,雾滴运动轨迹并未呈抛物线趋势四处散开,而是形成一个类似空心柱体的形状,雾滴粒子主要分布在外圈。结合图7b、7c可知,雾滴经喷嘴电机甩出后在计算中达到横向位移最大后,在旋翼下洗气流场影响下部分雾滴粒子发生转向,具有反向运动的趋势。从图12b、12c可见,在两个截面中,x轴的负半轴以及z轴的负半轴粒子飘移距离均大于正半轴。结合图6以及图7可观察到以下现象:相邻旋翼转向不同,存在互相干扰现象,气流引入区的速度略高于气流导出区,气流引入区的流线更加密集,该处风场对雾滴的反馈作用更加明显。
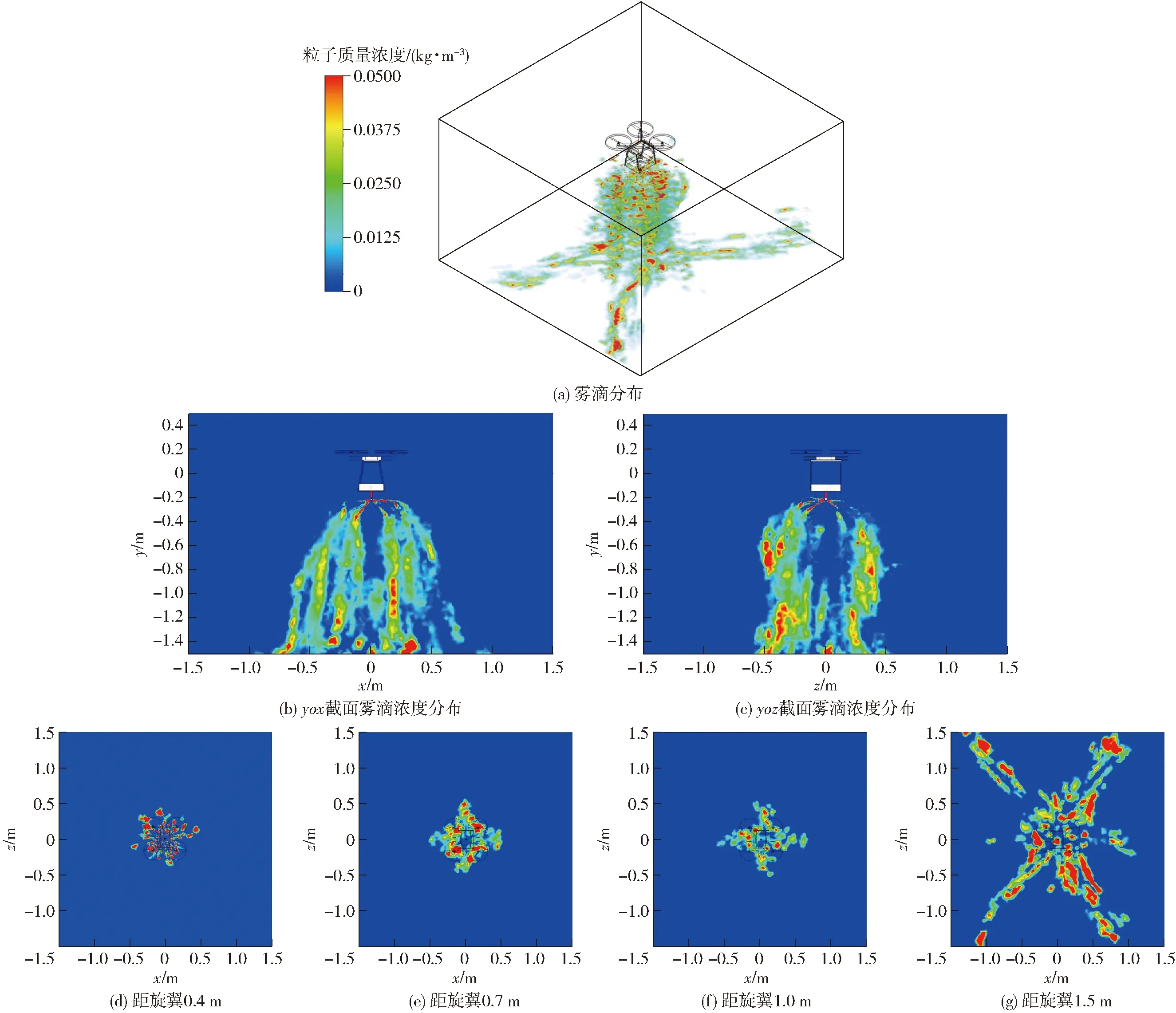
图12 雾滴浓度分布
图12d~12g展示了在下洗气流稳定后,距离旋翼0.4、0.7、1.0、1.5 m处的雾滴粒子浓度xoz切面云图。图12d呈现了雾滴刚被甩出的情况,结合图7c可知,雾滴刚被甩出时初速度远大于风场风速,因此下洗气流场对雾滴的反馈作用不明显,导致雾滴四周均匀散布。结合图7d和图8a,雾滴在下洗气流场和周向黏附力的作用下呈螺旋状下降运动。随着距离旋翼高度的增加,雾滴浓度分布由均匀分布变为集中于两个气流引入区。图12e~12g验证了雾滴在下洗气流场影响下的最大横向位置为0.6 m,且随着高度增大,雾滴群逐渐散开,分布更加分散。雾滴主要分布区并不在旋翼正下方,而是在旋翼之间(两个气流引入区和两个气流导出区)。其中,气流引入区的浓度及分布范围均高于气流导出区。而在中心区,由于雾滴沿锯齿端面运动,以及下洗气流场影响下的反向运动颗粒较少和地面涡流带动的粒子反向运动,导致中心区的沉积量较少。图12g显示液滴在四周扩散沉积,这是因为该切面处于接地面,液滴在地面发生沉积,并在下洗气流场的带动下向外扩散。为保证雾滴汇聚于中心区,防止雾滴飘移离散,将作业飞行高度设定在0.80~1.00 m之间。
5 结论
(1)通过建立三维模型,研究了小载荷无人机的下洗气流场雾滴沉积的关系,为该领域的发展提供了理论基础。
(2)构建了小型四旋翼植保无人机在2 kg载荷情况下的下洗气流场数值模拟模型,并进行了下洗气流场y轴风速验证。试验值与模拟值的误差在20%以内,证实了数值模型的可靠性。
(3)针对四旋翼植保无人机的雾场特性,建立了植保无人机喷药状态下的离散运动模型(DPM)。通过定量分析得到了雾滴运动轨迹在该下洗气流场的最大横向距离为0.6 m,雾滴群呈螺旋式下降,先收缩后扩散的趋势,雾滴主要沉积在两个气流引入区和两个气流导出区。
(4)在实际作业中,为降低雾滴飘移量,提高农药使用率,建议小型植保无人机作业方向与地表方向平行,作业高度设定在0.80~1.00 m之间。
猜你喜欢
广西植保(2021年4期)2022-01-06
成都信息工程大学学报(2021年5期)2021-12-30
今日农业(2021年17期)2021-11-26
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
新农业(2017年2期)2017-11-06
能源(2017年8期)2017-10-18
北京航空航天大学学报(2016年8期)2016-11-16
新农业(2016年22期)2016-08-16
