
双有源桥DC-DC变换器虚拟仿真实验平台设计
2023-09-22 06:31:04闫其路
池州学院学报 2023年3期
李 梅,闫其路
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
双有源桥(Dual Active Bridge,DAB)DC-DC 变换器具有电气隔离、双向能量流动、功率精准调节控制与快速动态响应等优点[1],因此被广泛应用于电力电子变压器领域,如:高速列车电力牵引变压器[2]、直流微电网的能量转换和储存系统、电动汽车中电能V2G 与V2H 等[3-5]。在面向DAB DC-DC 变换器的教学实验或课程实践中,由于受到实验室资金投入高、设备维护维修困难、高电压环境下的安全性及实验结果的不确定性等客观条件限制,实验结果难以达到理想的教学预期目标。本文在响应教育部关于推进虚拟仿真实验教学的要求下,以建设国家级一流专业为契机,使用计算机以Matlab软件为依托,建立基于图形用户界面(Graphical User Interfaces,GUI)、Simulink 仿真工具箱、M 文件程序代码为主体,设计出DAB DC-DC 变换器虚拟仿真实验平台,可开展变换器动态响应测试、稳态性能优化等综合性、创新性实验。该平台不仅能完成各类验证性的基础教学实验,学生还可通过GUI实现人机交互编写控制程序,实现各类综合性、创新性实验的训练,从而达到加深理解此变换器与探索创新控制方法的教学目的。
1 变换器建模
应用Matlab/R2016b 软件,在GUI 中建立虚拟仿真实验平台。在Simulink 开发环境下搭建变换器系统仿真模型,变换器系统结构如图1所示。
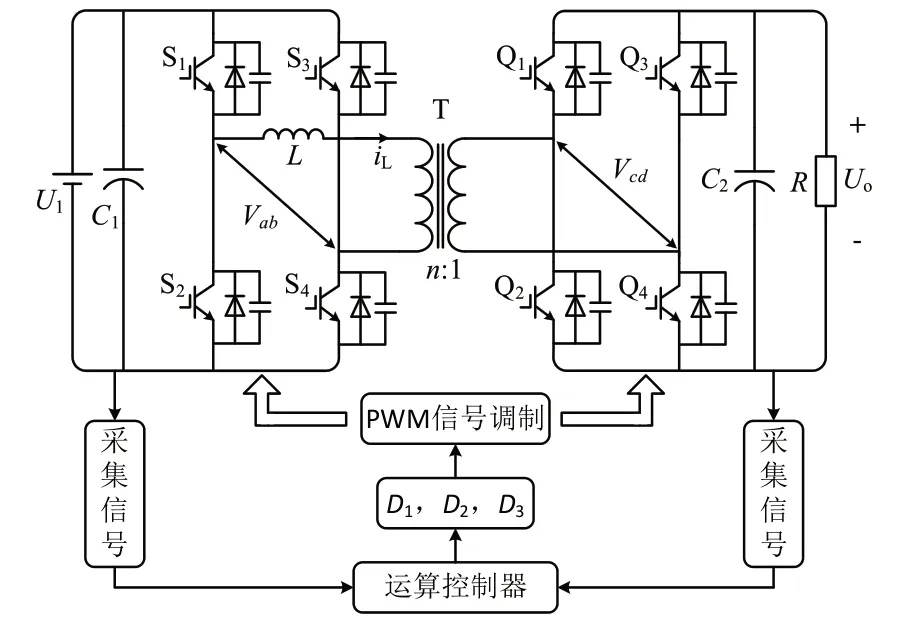
图1 变换器系统结构
变换器工作原理为:运算控制器接收采集信号经控制程序产生移相信号D,由移相信号调制产生PWM驱动脉冲。D2为变压器原边侧与副边侧开关管驱动信号的导通相位差,D1为原边侧开关管驱动信号的导通相位差,D3为副边侧开关管驱动信号的导通相位差。实验时,D2进行动态响应测试,D1和D3进行稳态性能优化测试,三个移相信号的不同组合实现各类优化策略。
以图1 拓扑为基础建立Simulink 仿真模型,命名为:DAB.slx,其结构如图2所示。
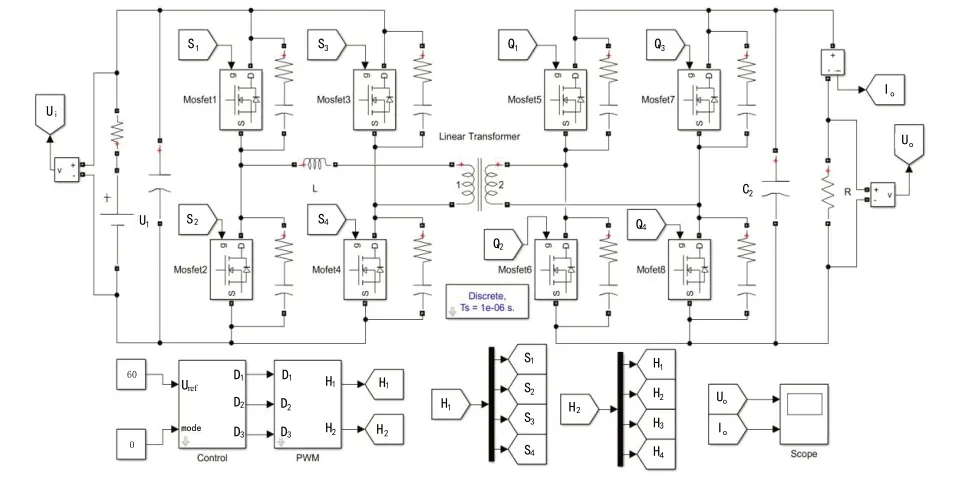
图2 变换器仿真模型
为了实现操作者对实验的控制,在仿真实验平台上可以对参数进行修改。模型参数分两部分设置:固定不变参数直接在Simulink 模型中设置,可变参数由虚拟仿真实验平台给定。为了实验在不同参数下、不同控制策略对变换器性能的影响,且为使实验结果在可控范围内,表1列出了主要参数的参考分配与设置。实验者如果对实验过程及实验原理清楚,可以在创新性实验中提出设计表1之外的合理参数,并自行验证。
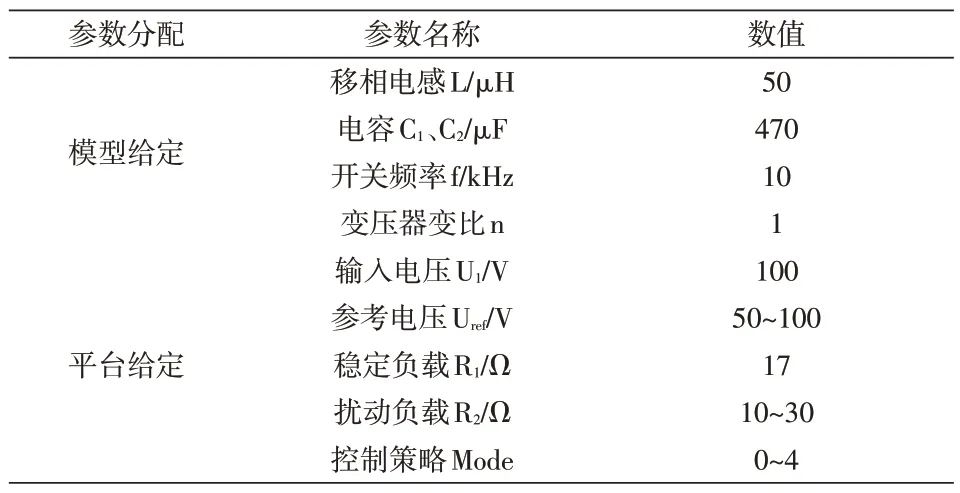
表1 变换器参数
表1 中控制策略Mode 值代表了变换器所使用的控制策略,具体描述如表2所示。
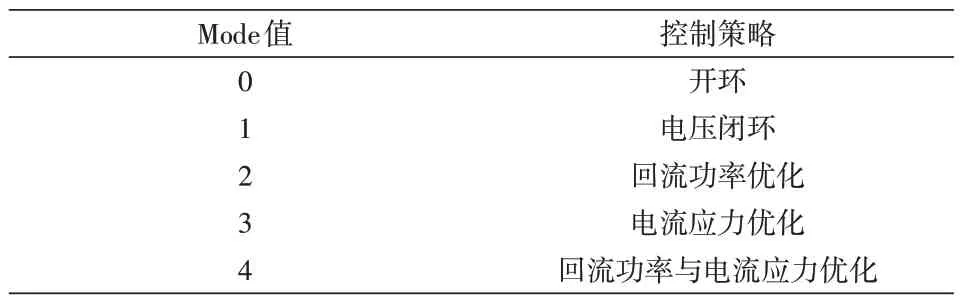
表2 变换器控制策略
系统闭环控制实现动态响应测试、稳态性能优化实验,通过分析变换器数学模型,得到控制策略中优化目标与移相信号D的关系。图2 中Control模块使用Simulink 自定义函数块中编写控制程序实现D的输出,其调用控制策略方法如图3所示。
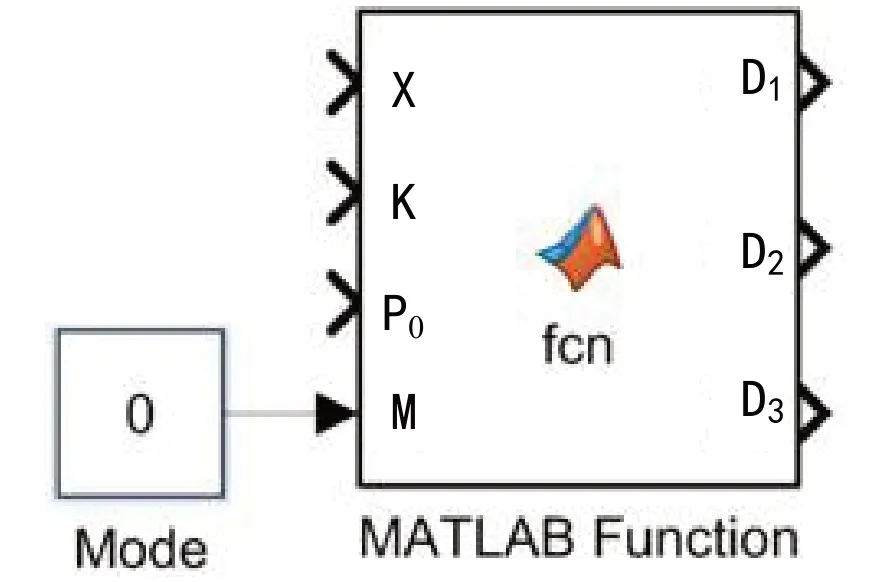
图3 调用控制策略
通过赋予控制策略Mode 模块不同的值,使变换器仿真系统将调用不同的控制策略。如Mode值为0,系统则为开环运行。
除实验平台给定的5种控制策略外,学生还可自行编写自己设计的控制方法,通过给定Mode 值实现对控制策略的切换调用。
动态响应实验中,需要观测负载扰动时不同控制策略对变换器动态性能的影响。扰动负载可用图4 所示的负载跳变模块替代图2 中的电阻R实现。通过设置Stair Generator 模块控制Ideal Switch开通与关断时间,切换不同阻值的R1、R2连接至主电路实现负载扰动的功能。
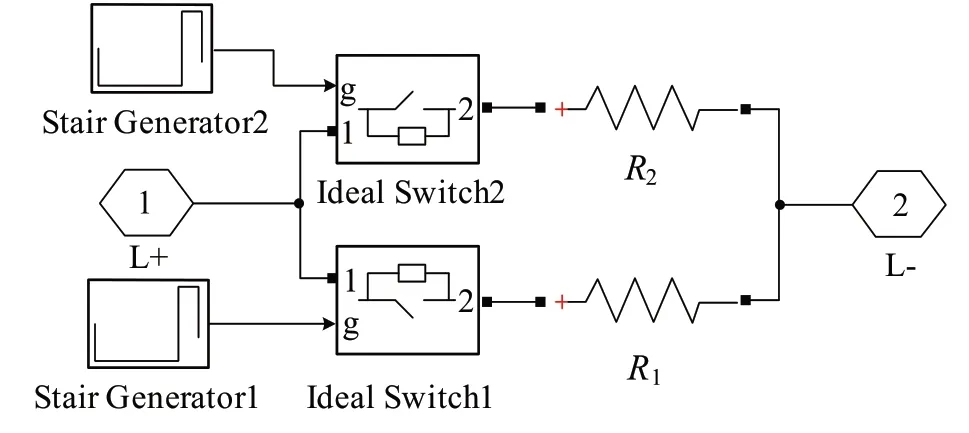
图4 负载跳变模块
2 变换器人机交互界面设计
虚拟仿真实验平台人机交互界面的设计具有两种实现方式:一是完全通过底层代码程序编写,其复杂程度高,对开发者编程能力要求高;二是通过guide 命令创建GUI,直接拖拽相应控件至设计界面,再对控件编写程序代码,其界面简洁,操作简单。因此本虚拟仿真实验平台的界面采用第二种方法完成设计。
本虚拟仿真实验平台人机交互界面主要由4个区域构成,分别为:电路拓扑结构显示区、可变参数设置区、实验命令区以及波形结果显示区。设计时,为了让每个区域内的控件协调联动,方便布局,均添加一个面板panel控件作为显示区域的底层。通过对区域内控件的回调函数编写程序代码完成人机交互界面的设计,各区域主要控件组成与程序代码如下:
(1)电路拓扑结构显示,用1 个坐标轴axes 控件实现,Tag 标识为axes_picture。该控件回调函数编写程序代码如下:
axes(handles.axes_picture);
picture=imread(‘DAB,jpg’);
imshow(picture);
(2)可变参数设置,包括9 个静态文本text 控件,直接输入可变参数的名称与单位;5 个可编辑文本edit控件,将可变参数值传递至Simulink模型,以输入电压U1为例编写程序,其Tag 标识为edit_U1。程序代码为:
U1=num2str(get(handles.edit_U1,‘string’));
set_param(‘DAB/U1’,‘amplitude’,U1);
(3)实验区域,由两个按钮pushbutton 控件组成,点击按钮可以调看Simulink模型与开始仿真实验。调看模型按钮的Callback函数程序代码为:
open(‘DAB.slx’);
开始仿真按钮的程序代码为:
options=simset(‘SrcWorkspace’,‘current’);
sim(‘DAB.slx,[],options’);
(4)仿真波形结果,由6 个坐标轴axes 控件用来显示需要观测Simulink 模型中示波器的波形。以输出电压Uo为例,坐标轴axes控件Tag标识为axes_Uo,示波器数据输出设置为Log data to workspace,变量名为Uo,保存格式为Structure With Time,则输出电压Uo波形的程序代码为:
global Uo;
axes(handles.axes_Uo);
plot(Uo.time,Uo.signals.values);
ylabel(‘Uo/V’);
grid on;
当需要清晰的显示某一区间段波形时,可添加如下程序代码:
axis([xmin xmax ymin ymax]);
人机交互界面其余控件的程序代码可按上述方法一一完成。
3 虚拟仿真实验
虚拟实验平台可完成的基础实验有负载扰动、电流应力和回流功率优化,其内置5 种控制策略。人机交互界面完成表1中平台给定参数值的写入,变换器控制策略选择以开环运行与闭环稳态优化两种方法为例。
为对比两种控制策略的结果,对实验的可变参数均设为一致,图5、图6 左下角可变参数设置模块,点击“开始仿真”按钮分别进行实验。实验结果分别如图5、图6 中右侧仿真波形所示,其中Uo和io分别为输出电压和输出电流波形,iL和Pbf分别为电感电流应力和回流功率波形。
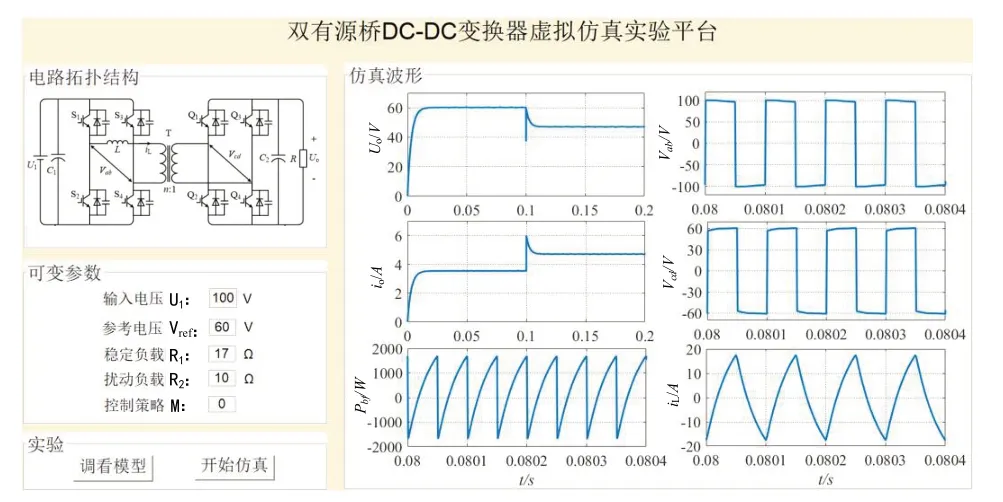
图5 虚拟仿真实验平台开环运行界面
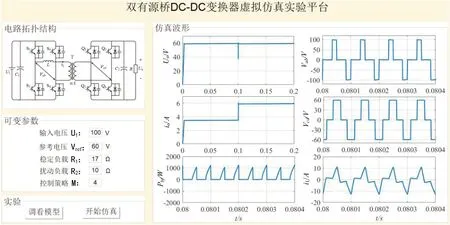
图6 虚拟仿真实验平台闭环稳态优化界面
分析图5 和图6,看出不同控制策略对变换器性能影响如下:
(1)由输出电压、电流波形知:动态响应方面,闭环控制相对开环控制能够快速达到电压稳定输出;当负载在0.1s时刻发生扰动,开环控制无法稳定输出电压,而闭环控制能够快速维持输出电压稳定。
(2)由电感电流应力与回流功率波形知:稳态性能优化方面,开环控制变换器存在回流功率,且峰值约为1600W,电感电流应力约为18A;采用优化策略时,变换器回流功率基本为0,电感电流应力约为13A,相比开环控制,变换器性能明显改善。
4 结语
虚拟仿真实验平台基于Matlab 软件中Simulink、GUI、M 语言程序代码三者联动,设计出双有源桥DC-DC 变换器仿真实验平台。由仿真实验,证明了所设计的虚拟仿真实验平台是可行的,能进行双有源桥DC-DC 变换器的基础实验。同时,该平台给学生提供了对变换器进行创新控制方法的渠道,学生在掌握该变换器知识后,可自行设计其他控制策略进行实验验证,克服了对于实验设备的依赖性。
猜你喜欢
软件(2018年7期)2018-08-13 09:44:42
电子测试(2018年1期)2018-04-18 11:52:24
电子技术与软件工程(2017年24期)2018-01-17 09:32:09
软件工程(2016年11期)2017-01-17 16:56:57
合成化学(2015年4期)2016-01-17 09:01:04
海军航空大学学报(2015年1期)2015-11-11 17:22:41
电脑迷(2012年24期)2012-04-29 00:44:03
化学工业与工程(2012年6期)2012-02-10 03:21:05
新媒体研究(2009年4期)2009-03-14 06:59:48
智能计算机与应用(2005年1期)2005-04-29 07:55:19
