
基于报警数据的公交车辆运行风险空间分布特征研究
2023-09-21 04:57郦红艺
交通科技与管理 2023年17期
郦红艺
(扬州大学,江苏 扬州 225000)
0 引言
随着我国城市化速度的加快及城市基础设施的完备,一线大城市人口密度进一步加大,城市公交车作为低价、便捷的出行方式之一,成为大多数市民首选的出行工具。但是鉴于城市公交车承载量大、运行时间长等特点,也存在较多的安全问题。从2010—2023 年间,人们对于道路交通事故的重视程度提升,交通安全意识也增强了,使得由于道路交通事故所导致的人员伤亡也在逐渐下降,但是在人类因事故死亡的类型中,交通事故仍然排在前十。频发的城市公共交通运行事故不仅直接威胁着人民的生命安全,更严重制约着我国社会经济的发展。国家发布的《交通强国建设纲要》中也明确指出交通安全保障实现完善可靠、反应迅速的发展目标,加强交通安全综合治理,切实提高交通安全水平。
城市交通事故空间分析方法的研究主要是从宏观区域层面建立交通事故及其影响因素之间的联系。有学者从宏观角度分析不同规划水平的区域影响因素与交通安全水平之间的关系,其划分的空间分析单元主要包括 州(State)[1]、郡/ 县(County)[2]、行 政 区 划[3]、人口普查区(Census ward)[4]、邮政编码区(Zip Code Tabulation Area, ZCTA)[5]、地理栅格[6]、交通分析小区(Traffic Analysis Zone, TAZ)[7]等。王雪松等[8-9]利用美国佛罗里达州Orange 县的交通安全数据库分析交通小区的路网形态结构,通过分析交通小区事故与影响因素之间的特征,基于事故与因素的关系建立贝叶斯自回归模型,并据此挖掘了交通小区层面的影响因素及其对交通事故的影响作用。黄合来等[10-11]利用美国佛罗里达州某县的数据建立交通小区,分析城市路网交通事故的特征,基于交通小区的路网特征数据、人流出行数据等,建立了基于空间自相关的贝叶斯模型,以此评价不同分区尺度对城市道路交通安全的影响。
该文基于公交运行报警数据分析其在空间上的特征,首先利用斯皮尔曼相关系数法计算公交运行报警数据的线性关系;然后采用核密度估计与全局莫兰指数探究公交运行报警数据的空间相关性,为之后辨识公交风险位置提供了坚实的基础。
1 数据基本特征
1.1 数据来源
该文数据来自镇江市公交集团,通过汽车行驶记录仪、智能驾驶辅助终端、驾驶员状态监测(DSM)摄像机、高级驾驶辅助系统(ADAS)摄像机、主动安全报警系统、汽车行驶记录仪摄像头等公交车载报警检测设备,采集镇江市2022 年11 月的公交运行报警数据。
1.2 数据类型
对于报警发生的类型主要可分为两大类:第一类为公交驾驶员的异常驾驶行为包括打呵欠报警、打手机报警、抽烟报警、左顾右盼报警、疲劳驾驶报警等。第二类为公交车辆的异常驾驶状态包括车道偏离报警、前向碰撞报警、急加速报警、急减速报警、遮挡报警等。公交运行报警数据发生的类型见表1。
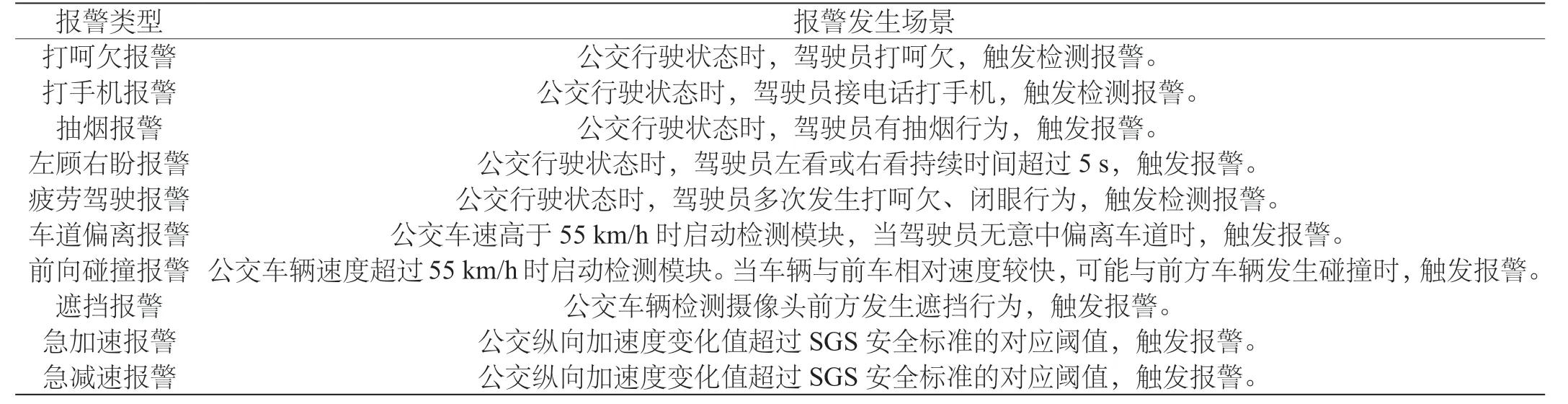
表1 公交运行报警数据类型
1.3 基于公交报警数据的运行风险
打呵欠报警、打手机报警、抽烟报警、左顾右盼报警、疲劳驾驶报警数据代表驾驶员有规定驾驶行为之外的影响公交运行安全的行为,可能引发公交运行风险;车道偏离报警、前向碰撞报警、遮挡报警、急加速报警、急减速报警数据代表车辆没有平稳运行或出现遮挡摄像头现象,可能会与其他车辆发生碰撞,引发危险。由于打呵欠和抽烟报警次数在样本中很少,因此下文分析将不再提及。
2 分析模型及方法
“空间”一词,源自地理科学、区域科学,通常可以理解为地理现象在空间上呈现的区域分布状态,空间自相关与相关性分析是数据重要的两个性质。空间自相关与相关性分析主要研究数据之间是否存在高度线性关系,为了探究公交运营报警数据在空间上的特征分布,应对公交运营报警数据进行空间自相关与相关性检验。
公交运行报警数据的相关性检验主要是分析不同类型报警数据之间的相关性,常见的方法包括:Pearson(皮尔逊),Kendall(肯德尔)和Spearman(斯伯曼/斯皮尔曼)。三种相关分析方法中Pearson 相关系数最为常用,如式(1)所示:
但利用Pearson 相关系数进行计算时,首先需要验证数据是否满足正态分布,而Spearman 相关系数就不用满足此前提条件。因此该文利用适用范围更广的Spearman相关系数来分析公交运行报警数据之间的相关性。
该文利用核密度估计、莫兰指数分析了公交运行报警数据的空间自相关性。
核密度估计方法(KDE)属于非参数检验方法中最常用的技术方法之一,普遍用于估计一个未知的概率密度函数,是对直方图的一个自然拓展,改善了直方图存在的不连续问题,核密度估计的分析精度更高。该方法在日常运用中具有以下特点:适用性强,灵活性好。核密度估计方法不受数据的限制,不需要事先假设数据的概率分布模式。取而代之的是通过获取数据本身的特征来处理任意概率分布,从而具有很强的适用性和灵活性。
核密度估计方法最初是为了估计平滑的经验概率函数而设计的。目前在GIS 领域,该方法是一种常用的空间分析技术之一,主要实现将地理上分布的点状数据转换为平滑的密度表面的功能。其基本思想是把每一个发生的事件看作一个核心要素点,根据一定范围内点与其之间的距离计算该点的密度值,然后生成一个平滑曲面。根据地理学第一定律,距离中心点越近,密度值越大,反之则越小。正好落在以中心点为原点、以带宽为半径的圆的边界上的点,其密度值为零,其基本原理如图1所示。

图1 核密度估计原理图
由于莫兰指数的计算是以划分的位置分析区为前提,因此首先利用KNN 最邻近算法以每个位置分析区的质点为依据计算分析区与分析区之间的空间矩阵,其中距离的选取采用欧式距离,如式(2)所示。
最终计算的空间矩阵如图2 所示。
利用计算的空间矩阵采用公式(3)计算莫兰指数,分析公交运行报警数据的空间相关性。
3 公交运行报警数据的空间特征分析
3.1 公交运行报警数据的相关性检验
该文利用Spearman 相关系数来分析公交运行报警数据之间的相关性,结果如图3 所示。

图3 Spearman 相关系数图
一般认为,相关系数大于0.7 即代表这两类数据的相关性较高,通过图3 发现,打手机报警与打瞌睡、遮挡、左顾右盼报警;左顾右盼报警与打瞌睡、遮挡、打手机报警;车道偏离报警与疲劳驾驶、前向碰撞报警的相关性较高。这在一定程度上说明当发生前一种报警数据之后,后一种报警发生的可能性也很高,比如发生车道偏离与疲劳驾驶的相关性高达0.8,说明司机的状态对于安全驾驶行为的影响较大。
3.2 公交运行报警数据的核密度估计
将公交运行报警数据中不同类型的报警数据进行核密度估计,参数采取自适应带宽进行处理。由分析结果可知,车辆发生车道偏离报警的热力区域主要集中在镇江市中山西路与中山东路附近一带;驾驶员抽烟报警热力区域主要分布在以下两块:一块位于长江路、中山西路与九华山路的交界处,另一块位于左下角的金润大道上。
总体上,报警分布的热力区域以市中心范围的中山东路、中山西路为主,同时还在梦溪路、丁卯桥路、乔家门路等区域分布。
3.3 公交运行报警数据结论的莫兰指数
利用公式(4)计算莫兰指数,分析公交运行报警数据的空间相关性,选取急加速和急减速报警,如图4~5所示。
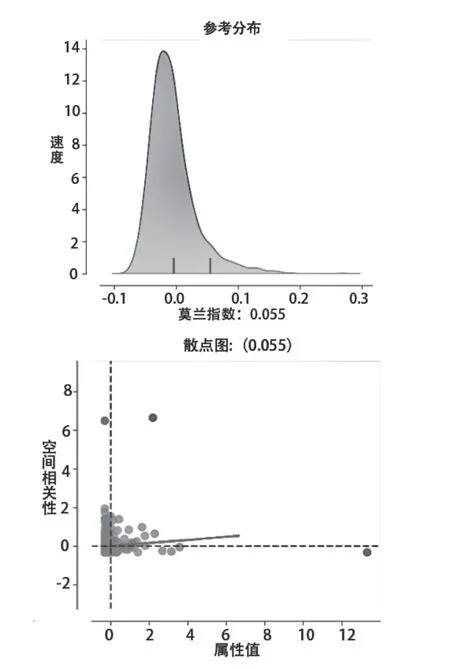
图4 急加速莫兰指数示意图
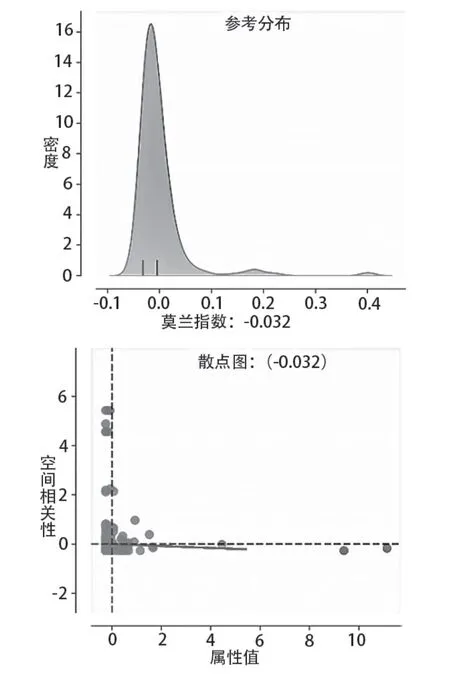
图5 急减速莫兰指数示意图
对莫兰指数的结果进行整理,如表2 所示。

表2 不同变量的莫兰指数表
表2 显示了莫兰指数检验的空间自相关结果,所有报警类型的变量在0.01 以下水平显著,这意味着驾驶员疲劳驾驶报警、驾驶员抽烟报警、车辆急减速报警、车辆急加速报警、车辆车道偏离报警并不呈现空间自相关。然而驾驶员急减速报警的Z 分值是负的,这表明驾驶员急减速报警的空间分布更集中在某一特定区域。
3.4 结论
该文基于对公交运行报警数据的空间特征研究,从公交运行报警相关性分析、空间特征分析两个角度进行挖掘,分别采用Spearman 相关系数、核密度估计、莫兰指数进行分析。结果发现,公交运行报警数据之间存在较强的相关性,但是在空间上大部分数据并不呈现空间自相关性,但急减速报警在空间上更呈现空间集聚效应,结合核密度热力图可知急减速报警在景区附近居多。
4 讨论
近年来,随着公共交通的快速发展,公共交通已经成为居民出行的重要交通方式之一,公交汽电车拥有量更是连年上升。但是在公交快速发展的同时,公交运营安全逐渐成为重点。该文以公交运行报警数据为依据,对公交报警数据空间特征进行探究,以期为城市公共交通运行管理提供科学决策,对公交运行风险做到事前精准预防,提高公交日常运行安全。
现有研究对于公交运行安全提出的建议大多从公交运行的角度,以定性分析为主,缺乏以大数据为基础的定量分析,同时受限于所分析的数据源(大多局限于模拟驾驶实验数据)一般通过抽样测试的手段,抽样驾驶的数据可能与实际驾驶数据存在较大出入,无法准确反映公交实际运行情况,很难有效针对公交车辆与公交驾驶员的实际情况进行合理安全分析。因此,基于公交运行报警数据的公交空间特征研究可以为公交的日常安全运行提供指导,在宏观上对公交经过的位置风险进行量化辨识,为公交管理者提供决策依据;在微观上,对公交驾驶员的日常行车安全提供保障。
猜你喜欢
艺术学研究(2022年6期)2023-01-16
廊坊师范学院学报(自然科学版)(2022年3期)2022-10-11
北京航空航天大学学报(2022年8期)2022-08-31
今日农业(2021年8期)2021-07-28
科技视界(2021年4期)2021-04-13
儿童故事画报·智力大王(2018年1期)2018-10-30
画刊(2017年9期)2017-09-25
画刊(2017年2期)2017-04-12
吉林大学学报(理学版)(2014年3期)2014-03-06
警察技术(2014年1期)2014-02-27
