
基于XBee通信技术的无人机遥测系统设计
2023-09-20 13:01:00李常磊王俭臣
无线互联科技 2023年14期
李常磊,王俭臣
(驻西安地区第九军代室,陕西 西安 710064)
0 引言
传统的无人机完全由人工遥控的,但随着相关技术的日趋成熟,依靠先进的传感器、嵌入式计算机和人工智能系统,显著提升了无人机的自主程度。具有云台的无人机,如大疆幻影IV Pro及Skydio R1,已实现了障碍物检测、躲避、自动着陆等功能[1]。此外,随着配备摄像、垂直起降等功能的普及,无人机已被广泛应用于媒体、监视、搜索和救援等不同领域。
遥测系统是指具有对一定距离的被测对象的某些参数进行测量、传输和处理功能的系统。通过测量无人机在飞行中的参数,并对数据进行记录和发送,有利于对无人机进行实时监控。本文将基于XBee通信技术设计一套高效的无人机遥测系统。
1 遥测系统架构设计
在遥测系统设计过程中,需要一个开源的微控制器,以便根据传感器的要求对所需的采样率进行编程。本文采用了基于ATmega328P的微控制器Arduino Uno,该控制器的IDE界面有助于用户快速完成电路设计,并确定用于输入和输出数据引脚[2]。此外,在设计的遥测系统中选择XBee-PRO作为射频模块,该模块采用802.15.4、多点和Digi无线网络协议,具有低功耗和大容量的特点。本文设计的遥测系统的信号流,如图1所示。
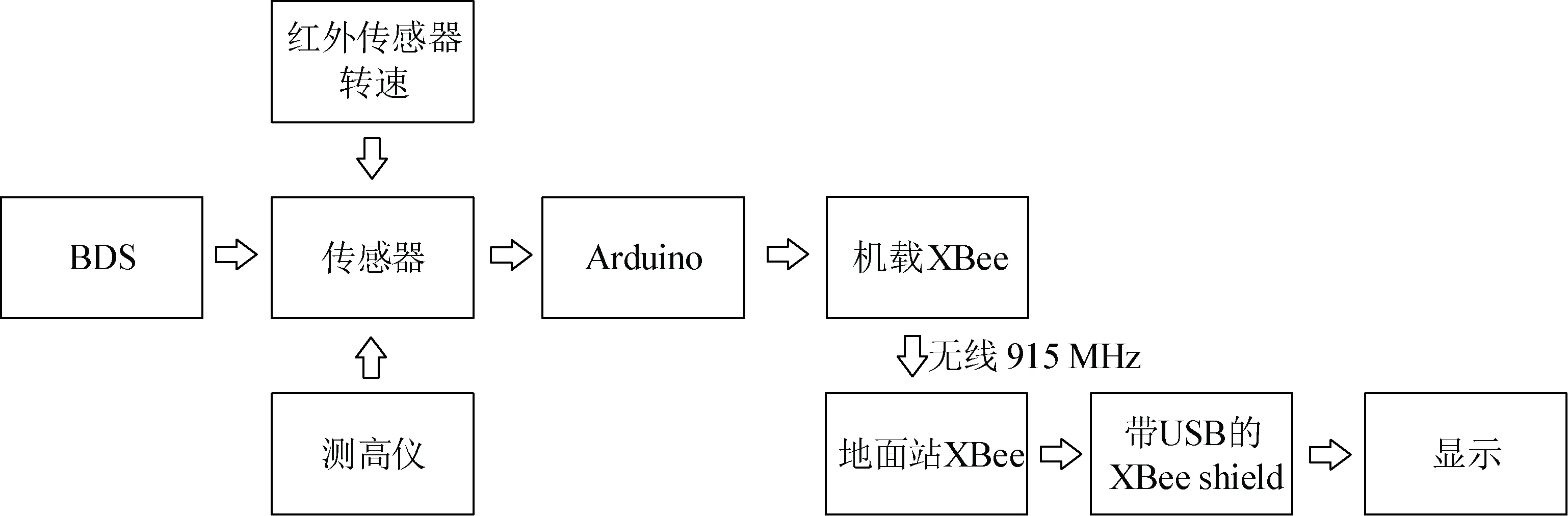
图1 遥测系统的信号流
开发遥测系统的主要挑战是在保持系统低功耗的同时,依然具有较高的灵活性来测量所需参数并将其无损地传输到地面站[3]。为了保持地面站和无人机的正常通信,图1中的两个XBee的相关参数设置应相同。将信号发送端设置为协调器,接收端设置为接收器。协调器将与无人机上的Arduino放置在一起;接收器将位于地面站,并使用XCTU软件完成数据接收与显示。所设计系统的真实模型如图2所示。
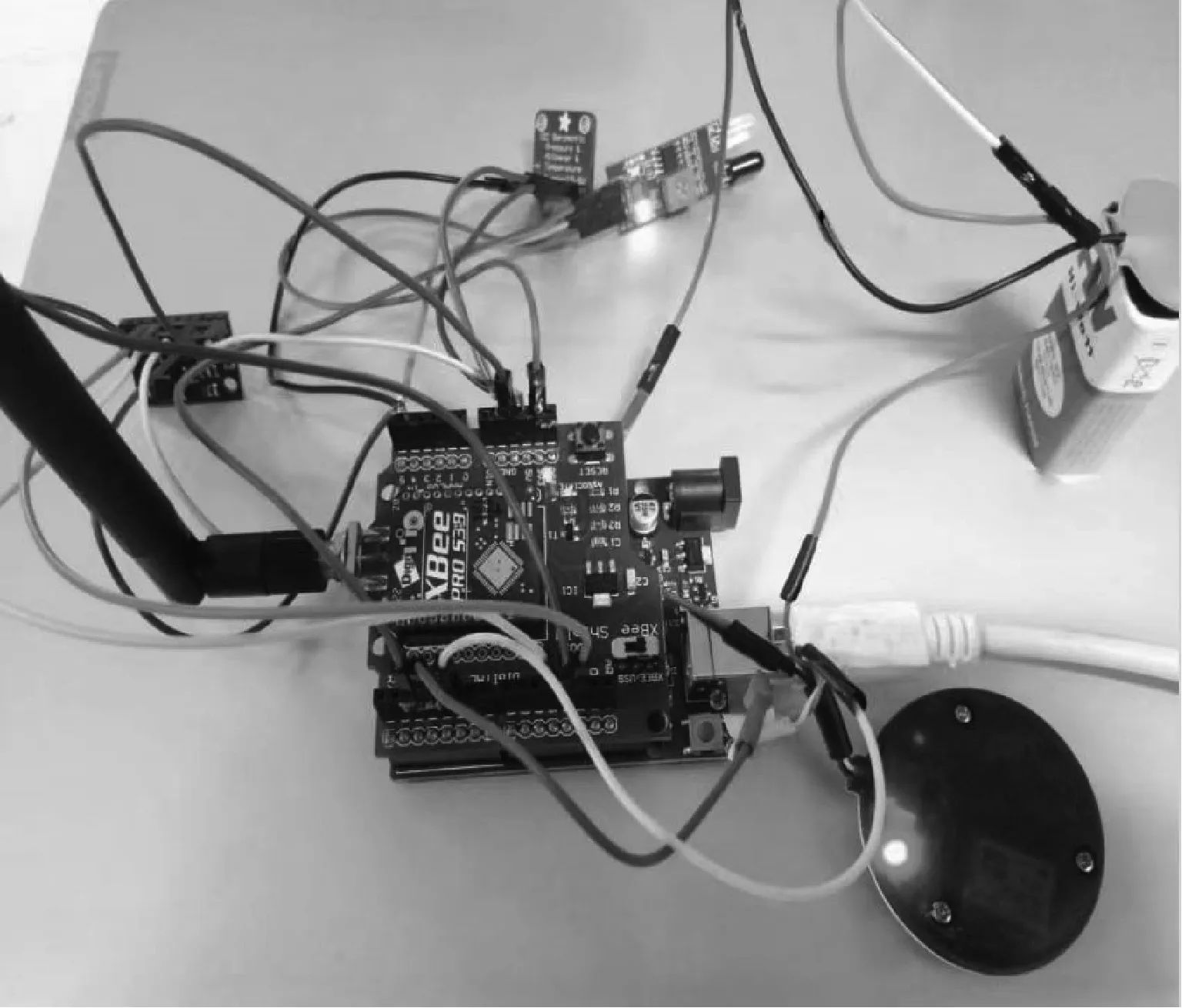
图2 遥测系统真实模型
2 遥测系统传感器及地面站设计
2.1 传感器和信号调节
遥测系统设计架构主要包括测量无人机基本参数所需的传感器和通过XBee PRO S3B模块传输数据的串行通信模块。需要采集的参数包括海拔高度、位置、电池电压、电机转速和执行器的温度。
XBee shield无线数据传输载板用于连接XBee S3B模块到Arduino,能够将XBee引脚固定在一个焊锡板上,并提供数字2~7引脚和模拟输入。当跳线在USB位置时,XBee模块的DOUT引脚被连接到FTDI芯片的RX引脚,而XBee模块的DIN则被连接到FTDI芯片的TX引脚[4]。
XBee-PRO S3B模块允许以200 kbps的射频数据率进行6 km范围的无线通信。它有一个2.1 dB的RPSMA连接器偶极天线。其中,无线电模块设备包括:微控制器EFM32G230F128、低功耗射频收发器ADF702和射频功率放大器。
采用MPL315A2作为提供海拔高度的测高仪,它是一个带有I2C接口的MEMS压力传感器,其分辨率为1.5 Pa,即0.3 m高的分辨率。该传感器使用SDA和SCL完成数据传输。将其连接到微控制器V+,并将其VDD和GND引脚接地。由于采用了UNO,SCL到I2C时钟模拟连接引脚5,SDA到I2C数据模拟连接引脚4。将MPL315A2库安装到Arduino IDE中,以便从传感器中提取数据。
为了定位无人机在空间中的位置,将遥测系统与北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)传感器连接,以提供实时的经纬度与方位数据。在所设计的系统中,使用带有内置罗盘模块的高精度BDS模块,该模块具有较高的灵敏度,并具有陶瓷贴片天线的有源电路,更新速率为5 Hz,航向精度为0.3°。
为了使电机具有高效的性能,需要对其工作进行分析。在无人机中使用了预测性维护设置,并使用了温度、转速等传感器来记录飞行中的电机性能。同时,采用LM393红外传感器,获取飞行中电机的转速数据。红外线被连接到微控制器的电源和一个数字引脚上,以获取传感器的数据。它的工作原理是检测螺旋桨旋转中同一点之间的时间差。此外,转速数据被记录在地面站进行分析。
电池的电压由无人机到地面站的分压器电路决定。这有助于提高飞行性能和续航能力。它也可以作为故障安全参数,一旦电池电压低于极限值,便向地面站发出警告。
2.2 地面站设置
地面站有一个安装在XBee shield上的接收器,通过USB与计算机连接,并通过XCTU和Coolterm等软件用于显示数据。
(1)XCTU软件。XCTU是一个免费的多阶段应用程序,旨在使开发人员能够通过易于使用的图形界面与射频模块关联。它集成了新的工具,使XBee的设置、配置和测试变得更加简单。XCTU包含了用户快速使用XBee所需的大部分工具。需要注意的是,在XCTU中必须在模块设置部分设置默认值。XCTU能够显示文本数据和十六进制数据。
(2)Coolterm软件。Coolterm简单串口终端应用(无终端仿真),需要与连接串口的硬件交换数据。接收到的数据将显示在软件屏幕上,并提供数据记录和存储能力。
3 实验验证
对该遥测系统进行了实际飞行试验,并将接收到的数据显示在屏幕上,其中,波特率为9 600。Coolterm软件的结果如图3所示。
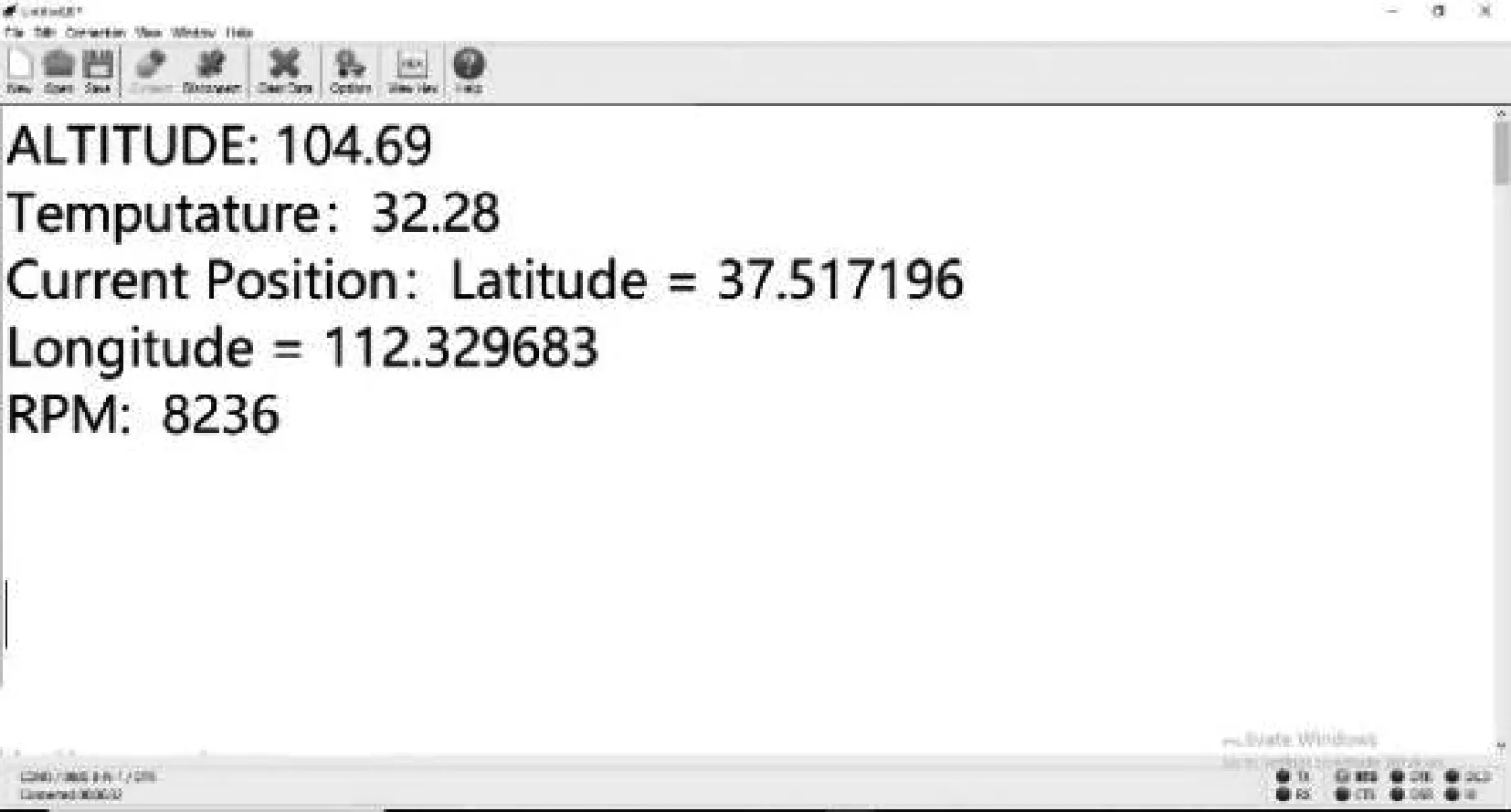
图3 在Coolterm软件中的结果
通过该软件可以处理的最大数据速率为每秒20个数据,这样就可以不间断地显示数据。所获得的数据响应结果,如表1所示。

表1 地面站数据记录
无人机的当前高度是由作为主要传感器的测高仪获得的,也可从BDS获得。通过比较这两组数据可以发现,两个传感器的数据准确性相似。此外,通过软件中显示的数据,也验证了设计系统的有效性。
4 结语
本文主要实现了基于XBee通信技术的无人机遥测系统设计,机载XBee Pro S3B可以通过接收来自传感器的数据与地面站的其他XBee模块通信,速率更快,数据丢失最小,范围大,能够实现BDS、测高仪等传感器数据的实时传输。可以得出结论:XBee Pro S3B模块可以有效地用于遥测,可以记录飞行路径的无人机参数。
猜你喜欢
汽车工程师(2021年12期)2022-01-17 02:29:46
军民两用技术与产品(2021年12期)2021-03-09 05:38:30
电子制作(2019年11期)2019-07-04 00:34:40
电子测试(2018年13期)2018-09-26 03:30:00
电子制作(2017年14期)2017-12-18 07:07:58
电子制作(2016年1期)2016-11-07 08:42:54
腹腔镜外科杂志(2016年9期)2016-06-01 12:10:07
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
单片机与嵌入式系统应用(2014年8期)2014-03-23 23:18:21
单片机与嵌入式系统应用(2014年9期)2014-03-11 15:35:13
