堤防险情隐患快速巡查系统研究与设计
2023-09-19 06:48徐兰玉杨浩东
江苏水利 2023年9期
徐兰玉,张 波,杨浩东
(1.水利部南京水利水文自动化研究所,江苏南京 210012;2.南京水利科学研究院,江苏南京 210029;3.深圳市城市公共安全技术研究院有限公司,广东深圳 518038)
1 概 述
堤防是重要的防洪工程,《2019 年全国水利发展统计公报》[1]统计显示,截至2019年底,全国共建成5级以上江河堤防32.0万km,其中1级、2级达标堤防长度3.5万km。堤防在长期服役过程中容易出现开裂、滑坡、浸散、管涌、流土和冲刷等灾害现象,引起洪水泛滥、影响居民生命财产安全及工农业的生产。堤防工程的空间跨度大,造成水文地质条件、隐患分布沿线随机性变化很大,采用传统的点式传感器进行堤防安全监测针对性不强,往往不能发现堤防工程发生的隐患及险情。因此,为掌握堤防工程安全状态,特别是汛期堤防的工作性态,确保堤防工程安全,巡视检查是较有效的方式之一,目前主要采用的是人工拉网式巡检。该巡检方式以目视为主,检查手段较为落后,需耗费大量人力,人工巡检效率较低、容易漏检且难以及时完全发现堤防隐患缺陷,无法适应国家提出的构建智慧水利体系的要求。
随着传感技术的发展和遥感技术的不断进步,分布式光纤[1]、红外热成像[2-3]、声发射[4-5]、雷达[6-7]、无人机[8]及水下机器人[9]等新型技术和装备被引入堤坝无损检测领域,利用无人机搭载多传感器获取堤防多源数据实现隐患识别已成为可能,这为堤防巡检提供了新的思路和手段。
因此,本文紧密结合堤防巡查的实际需求,以堤防灾害及隐患快速诊断为方向,利用无人机能实现大范围空中快速巡查的优势,研究利用无人机平台搭载可见光、红外、雷达等融合技术载荷用于堤防的日常巡检,有效提高巡检工作效率和堤防巡检的智能化水平,为保障堤防工程运行安全提供科技支撑。
2 空中堤防险情隐患快速巡查技术装备
2.1 结构组成
系统通过无人机平台集成搭载集可见光、热成像相机、激光雷达等传感器,为堤防隐患巡查提供新的监测手段。空中堤防险情隐患快速巡查成套装备包括:高可靠性的防雨抗风无人机,可更换电池和载荷的自主起降保障设施,可配备有双光载荷、热成像荷载、激光雷达、倾斜相机、多光谱相机等的智能载荷,拥有高性能的4G/5G 和无线电图传链路,基于云平台的智能化大数据处理平台,可实现堤坝巡检过程中航拍、测绘、数据分析、数据整理等功能。该系统既可以区域化部署,也可以全域部署和移动部署。
如图1 所示,利用无人机搭载可见光热红外双光相机及激光雷达载荷,对堤坝工程管理范围进行连续探测,从而获得全面覆盖堤坝的可见光、红外影像及激光雷达扫描数据,再通过机载图传系统将所采集的图像实时传输至地面站,从而实现堤防隐患的远程探测和实时辨识。

图1 基于激光雷达、可见光及热红外传感设备的空中巡堤平台
2.2 技术路线
通过分析各传感监测技术在堤防巡检方面的应用现状和趋势,采用“实验分析—机理剖析—关键技术—集成应用”全链条研发思路,应用多学科交叉融合理论方法,围绕实现堤防险情隐患快速巡查空中成套技术装备的总体目标,构建技术路线(图2)。

图2 技术路线
2.3 关键技术
(1)汛期堤防隐患高精度巡查要求下高可靠性空中平台选择。汛期条件下,尤其是刮风降雨以及承担一定的任务条件下,本项目的关键技术是如何确保空中平台的航迹稳定、长航时保证、巡检精准和起降可控以及结构模块化、通讯一体化和数据处理分析边缘计算化,使空中平台具有适应恶劣环境的能力。本项目在成熟军用产品JC-M15模组式多旋翼无人机的基础上,针对防尘防水性能方面的改进要求,通过对电机、外壳、通气孔、外露紧固件及接插件进行防尘防水设计,所有紧固件均选用高强度不锈钢材质,防水防锈处理,外露接插件和接口均采用防水接头或加装橡胶防水帽,机臂接插件处加装防水密封圈等,保证整机的防尘防水能力,以适应汛期恶劣的工作环境。
(2)汛期堤防隐患高精度快速探测与定量化表征。堤防渗漏识别的红外热成像检测技术:堤防实际环境复杂,受植被覆盖、非渗漏积水等表面温度场干扰,仅依靠原始红外图像读取温度异常点进行堤防渗漏水病害判别的准确性很低,因此提出堤防温度场辨识新指标,建立典型渗漏水病害红外图谱,以提高渗漏病害识别的准确度;激光雷达变形监测技术:通过对堤防巡查范围的机载激光雷达数据的获取和处理,得到精度很高的机载激光雷达DEM 产品,拟从定性和定量2个方面对多期机载激光雷达数据进行堵防变形动态监测,掌握一定时间段内堤防的变形趋势和特征,测算变形量;技术载荷的多样性决定了现场采集数据量大,如何完成实时监测和快速预警成为关键,为此将在应用微波通讯、4G/5G等多种无线通讯方式的基础上,采用自适应路由算法解决数据实时传输问题,结合压缩感知研发海量数据实时传输智能算法,采用自我生成算法实现信息的自我增强,采用像素级、特征集、决策级等多级融合算法实现多源数据融合;通过收集积累不同的险情案例,采用分类聚类算法和动态数据库技术形成险情动态对比数据库,采用专业UI设计实现界面友好、实时展示、长期预报、隐患预警、案例对比等功能的数据库构建和三维可视化软件开发。
3 系统实现与现场测试
在完成前期设计、单元开发与室内测试的基础上,选择在江苏省宿迁市南水北调泗洪站管理所“堤防险情模拟试验测试试验场”进行野外模拟实地测试联调演练,测试内容主要包括无人机搭载可见光、红外、激光雷达和微型SAR 技术载荷进行堤防空中快速巡查,实现对堤防大范围高精度快速巡查,管涌、大面积渗漏、变形、塌陷、滑坡等多类型险情。模拟滑坡、渗漏、泥泞路段成C 字型,泥泞路段最接近河道、模拟渗漏堤防垂直于河道、滑坡测试场景平行于河道,测区总面积约0.2 km2(图3)。

图3 现场测区
现场模拟了1 m 范围的滑坡,塌窝险情,直径10 cm 及以上的积水或管涌渗流,温差4 ℃及以上、背水坡直径≥5 cm的点状渗漏隐患以及温差4 ℃及以上、背水坡直径≥10 cm的面状渗漏隐患。在堤坝内部设置了多种渗漏场景,用于模拟不同深度、不同部位、不同流速的渗漏。
无人机巡检时根据线路运行情况、巡检要求,搭载可见光相机/红外热像仪、三维激光扫描仪等传感设备,各传感器主要监测目标见表1,主要形变及渗流监测结果见图4~8所示。

表1 不同空中载荷采集目标
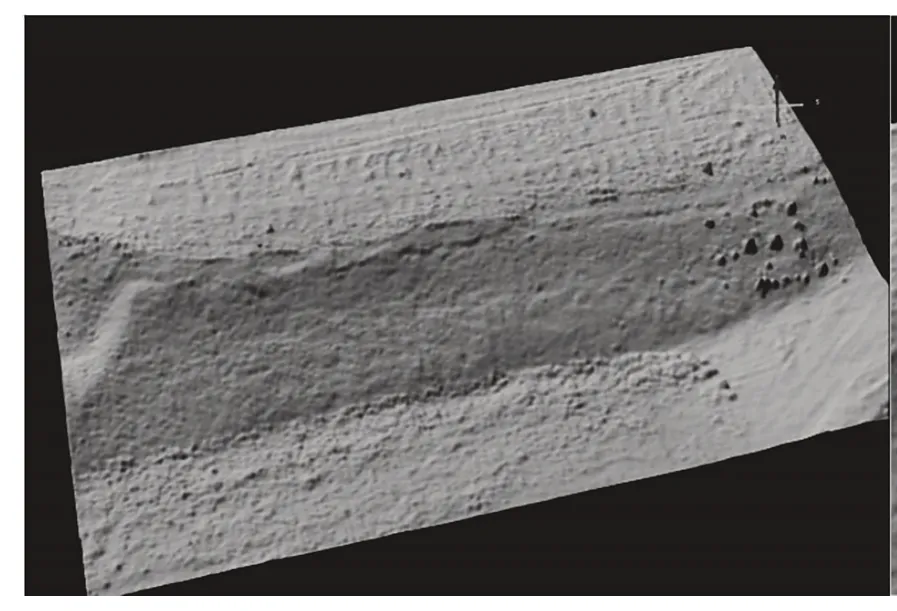
图4 隐患前形变输出
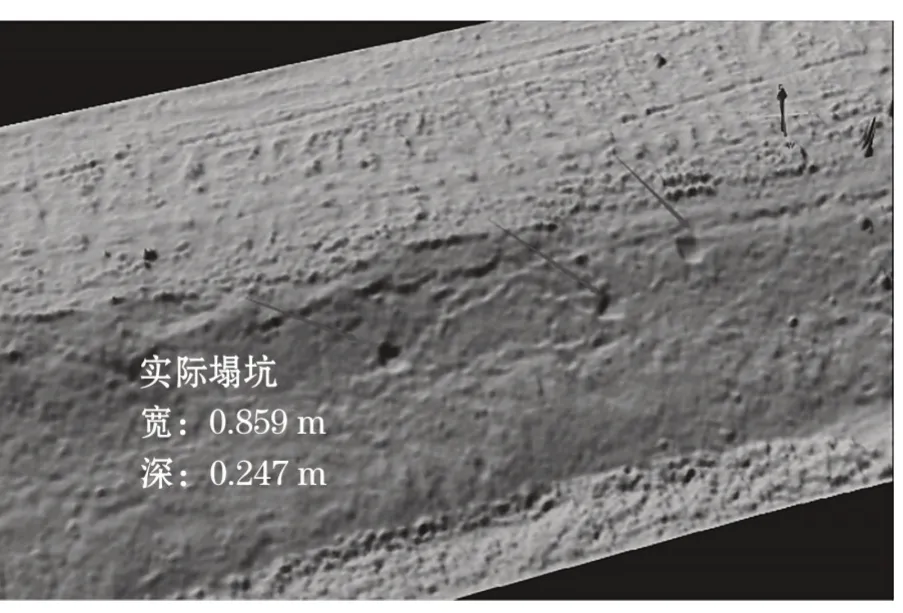
图5 隐患后形变输出
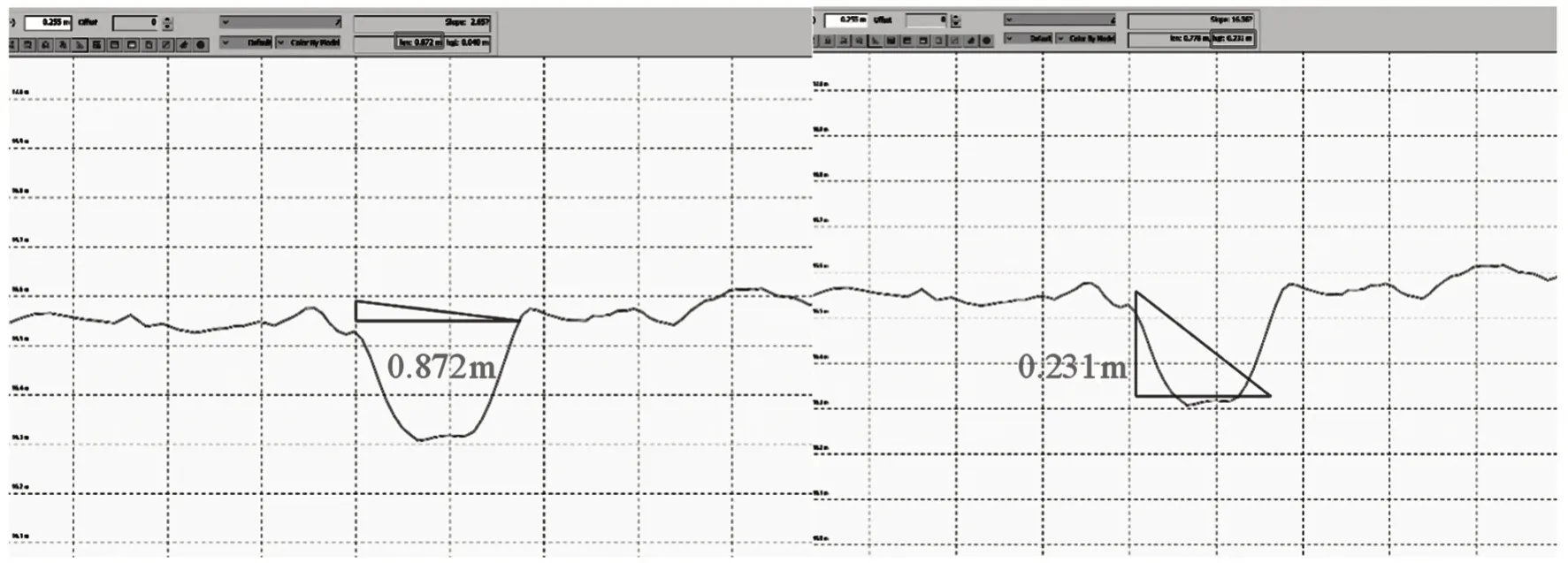
图6 模拟塌坑形变输出

图7 渗漏部位可见光图像输出
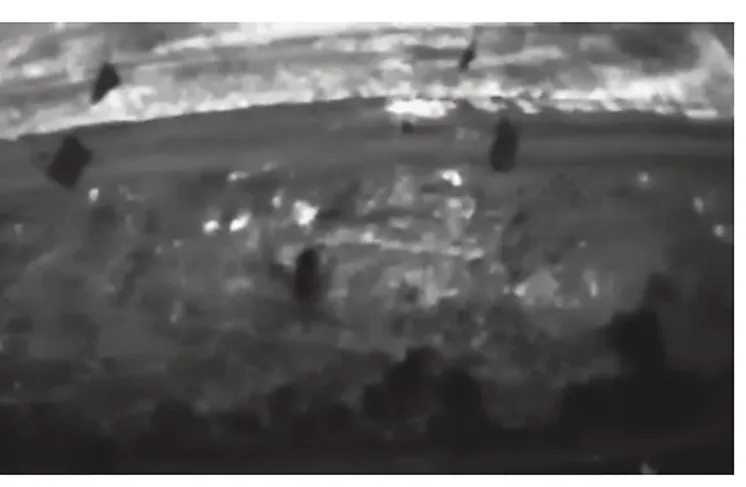
图8 渗漏部位红外影像
测试基本完成了各空中载荷的监测目标,从激光雷达获取的点云和DEM 模型中能较为清晰地看出人为模拟的塌坑、滑坡隐患,并可从模型中量取塌坑的宽度和深度等特征值信息,且测得的塌坑宽度深度数据均与实际坑的尺寸有较好一致性;渗漏部位在可见光图像中几乎不能区分,不过在红外图像中表现异常,比较显著,渗漏部位温度明显低于周围土体,但依旧难以与植被区分开来,可结合可见光图像综合考虑。但由于前期样本数量收集及模型训练的不足,本次测试未能实现隐患的机器自动识别。
4 结 语
空中巡查系统不仅可以在应急条件下直观、便捷地标识出堤防渗漏、形变等隐患险情,特别是通过多次巡查影像差分分析实现厘米级的形变定量监测,还可为堤防早期隐患识别和中长期的变形监测提供重要技术手段。通过样本的不断积累和模型训练,机器学习算法可以学习和识别堤防隐患特征,最终实现堤防隐患险情的判断和预测,使管理人员能够更直观地了解堤防的运行性态。
猜你喜欢
北京测绘(2022年5期)2022-11-22
散文诗世界(2021年11期)2021-11-30
加油站服务指南(2021年8期)2021-11-04
汽车观察(2021年8期)2021-09-01
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
江西建材(2018年4期)2018-04-10
河南水利年鉴(2017年0期)2017-05-19
水利规划与设计(2016年7期)2016-02-28
河南水利年鉴(2015年0期)2015-08-16