
类壁虎仿生机器人机械控制及实验
2023-09-18 14:18邱海飞张嘉友李成创王超辉彭永霄
机械设计与研究 2023年3期
邱海飞, 张嘉友, 李成创, 许 昊, 王超辉, 彭永霄
(1.西京学院 机械工程学院,西安 710123, E-mail: qhf8386@163.com;2.西京学院 电子信息学院,西安 710123)
人类早期的一些造物活动基本都是以自然生物体为蓝本,万物之形为人类社会的创新发展提供了原动力。作为自然界中常见的一种爬行纲动物,壁虎从远古时期演变至今,不仅在进化过程中经受住了物竞天择的考验,而且还形成了自身所独有的体态特征和先天功能,如在陡壁上吸附攀爬,是壁虎区别于其它爬行动物的典型标志[1]。在科学研究领域,对于仿生壁虎的探究一直备受关注和重视,而且类壁虎仿生机械的研究和发展也日益成熟,并已在民用、军事及航天等领域获得了广泛应用。
目前,关于仿生壁虎的研究主要集中在吸附方式和移动技术两方面[2],美国、日本等工业科技发达国家在这一领域处于领先水平,例如:斯坦福大学将人造橡胶制成的微小毛发应用于壁虎脚趾吸附,并利用电机和四杆机构实现了壁虎的抬腿移动;加州大学伯克利分校与Robot合作开发了轮式驱动壁虎机器人,可通过预装和剥离粘合剂来实现壁面吸附;日本三菱重工成功研制出了可在钢筋墙壁、天花板上吸附运动的磁性爬壁喷涂机器人,现已向市场出售和应用;日本应用技术研究所面向油罐、球形煤气罐及船舶等大型构造壁面,推出了一种车轮式磁吸附爬壁机器人,可替代人工进行维护作业[3]。相比之下,虽然国内在爬壁机器人应用和壁虎脚掌吸附材料研究方面也取得了一定成果,但与国外先进水平还存在一定差距,国内在该领域影响较大的有哈尔滨工业大学、北京航空航天大学、上海大学及中国科学院沈阳自动化所等[4]。
本文以爬壁虎为仿生原型,设计研制了一种具有吸附攀爬、自动避障、可视探测及远程操控功能的智能仿生机械壁虎,为悬壁勘探、险境搜救、环境监测及仿生玩具开发等提供了有效解决方案。
1 仿生思路及方法
根据壁虎体态特征和运动特点,对其躯体构造及功能进行模块化分解,如图1所示,将整只壁虎划分为七大模块,即头部、眼睛、躯干、大腿关节、小腿关节、脚掌趾及尾部。在此基础上,通过数字化建模、机构学仿真及单片机程序开发等,构建仿生壁虎机、电、气控制系统和预期爬行步态,同时将现代智能控制元素与仿生机体功能特征相融合,形成一种具备智能特性的类壁虎四足仿生机器人。

▲图1 壁虎体态模块划分
具体仿生功能模拟及其实现方法见表1。为使仿生机械壁虎具备良好的机动可靠性,采用机械连杆、轮组及舵机等模拟和拓展腿部关节构造。利用电磁阀、真空泵、软管及真空吸盘等,模拟壁虎的脚掌绒毛吸附和平衡防跌,并通过有序控制不同部位吸盘的负压通断,实现仿生关节在墙壁上的吸附停留与攀爬运动。此外,仿生机体系统内部搭载有超声波自动避障和无线图传摄像模块,不仅能对行进中的障碍物发生快速响应和智能避越,而且可借助显示终端实时探测、监控和分析外部环境,以此实现对壁虎视觉系统的功能模拟。

表1 仿生功能及其实现方法
2 吸附原理与实现
2.1 气动回路
为了实现仿生机械壁虎的爬墙功能,利用真空吸盘、软管、三通管、电磁阀和真空发生器等构建气动回路,如图2所示,该气动系统由一个真空发生器产生负压,通电工作时,气流负压经一个三通管分为两路,并由两个电磁阀分别控制负压气路通断,进而使四个吸盘根据实际需要有序产生真空负压,即每个电磁阀可同时控制两个吸盘产生真空吸力。

▲图2 气流控制回路
当机械壁虎吸附在墙面上静止不动时,两个电磁阀都处于开启状态,四个真空吸盘同时产生吸力;当机械壁虎在墙面攀爬前行时,为了保持机体平衡和足够的吸附力,在腿关节抬升过程中至少应保持两个真空吸盘同时产生吸力,此时一个电磁阀处于开启状态,而另一个电磁阀处于闭合状态。
2.2 吸附力计算
壁虎停留在垂直墙壁上时,四只脚趾产生的绒毛吸附力必须大于等于自身重量[5]。根据腿部关节构造和机身尺寸,选用直径d=50 mm的橡胶真空吸盘,则吸盘面积S=πr2=2.52π≈19.63 cm2,其吸附力计算方法如式(1)所示。
(1)
式中:W—吸附力,N;P—真空度,-kPa;S—吸盘面积,cm2;f—安全系数,f>=2.5。
▲图3 真空吸盘垂直悬挂
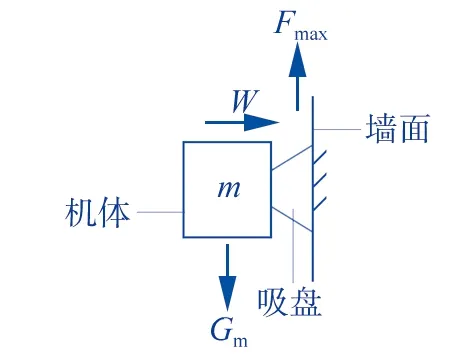
真空吸盘一般有垂直和水平两种悬挂方式,壁虎吸附停留在墙壁上时相当于垂直悬挂[6],如图3所示,因此,取安全系数f=8。分析承力情况可知,要使机械壁虎能够吸附于垂直墙面之上,必须令吸盘底面与墙面之间的最大静摩擦力Fmax大于等于机体自重Gm,如式(2)所示。
Fmax=μ·W≥mg
(2)
壁虎静止停留于墙壁时所需吸附力W可按式(3)进行估算。已知仿生壁虎机体质量m≈1.35 kg,重力加速度g≈9.8 m/s2,吸盘表面与墙面之间的最大静摩擦因数μ=0.45,则由式(3)可知W≥29.4 N,即最小吸附力为Wmin=29.4 N。
(3)
分析壁虎运动特点可知,为了使身体平衡,其爬墙运动过程至少有两个脚掌同时吸附于墙面之上[7]。因此,仿生机械壁虎必须保持至少两个吸盘同时处于工作状态。所以,单个吸盘的真空度可按式(4)进行计算。
(4)
令安全系数f=3.5,将Wmin、S和f的值代入式(4),计算可知P≥26.21 kPa,即单个吸盘所需要的最小吸附负压为-26.21 kPa。为保证仿生机械壁虎具有足够安全的吸附力,在此,选用负压为-55 kPa的真空泵作为真空发生器。
3 控制系统开发
3.1 步态分析
仿生机械壁虎可看作为一种四足仿生机器人,因此,设计其步态规划时常采用Trot步态,如图4所示。Trot步态是一种典型的对称步态,由于适用于中低速跑动,而且具有较高的能量效率,所以经常被应用于四足机器人[8]。

▲图4 步态规划时序
当仿生机体以Trot步态运动时,对角位置的两条腿(即:左前#1与右后#3,左后#2与右前#4)同时发生运动,并且会在半周期时刻进行切换。在理想状态下,对角位置的两条腿会同时抬起和落地。
为便于步态分析,令一个运动周期为1,设占空比为 0.5。分析图4所示仿生机械壁虎运动时序可知,在初始0时刻,对角线上的左前#1与右后#3先摆动,并在接近半周期时(1-ρ)进入支撑相,与此同时,对角线上的左后#2与右前#4开启摆动;当接近一个周期时(1.5-ρ),左后#2与右前#4进入支撑相,此时,左前#1与右后#3再次进入摆动相,并开始执行下一个运动周期[9]。控制步态运行时,在0~0.5个周期内,输出第1组坐标,在0.5~1个周期内,输出第2组坐标。
3.2 控制流程
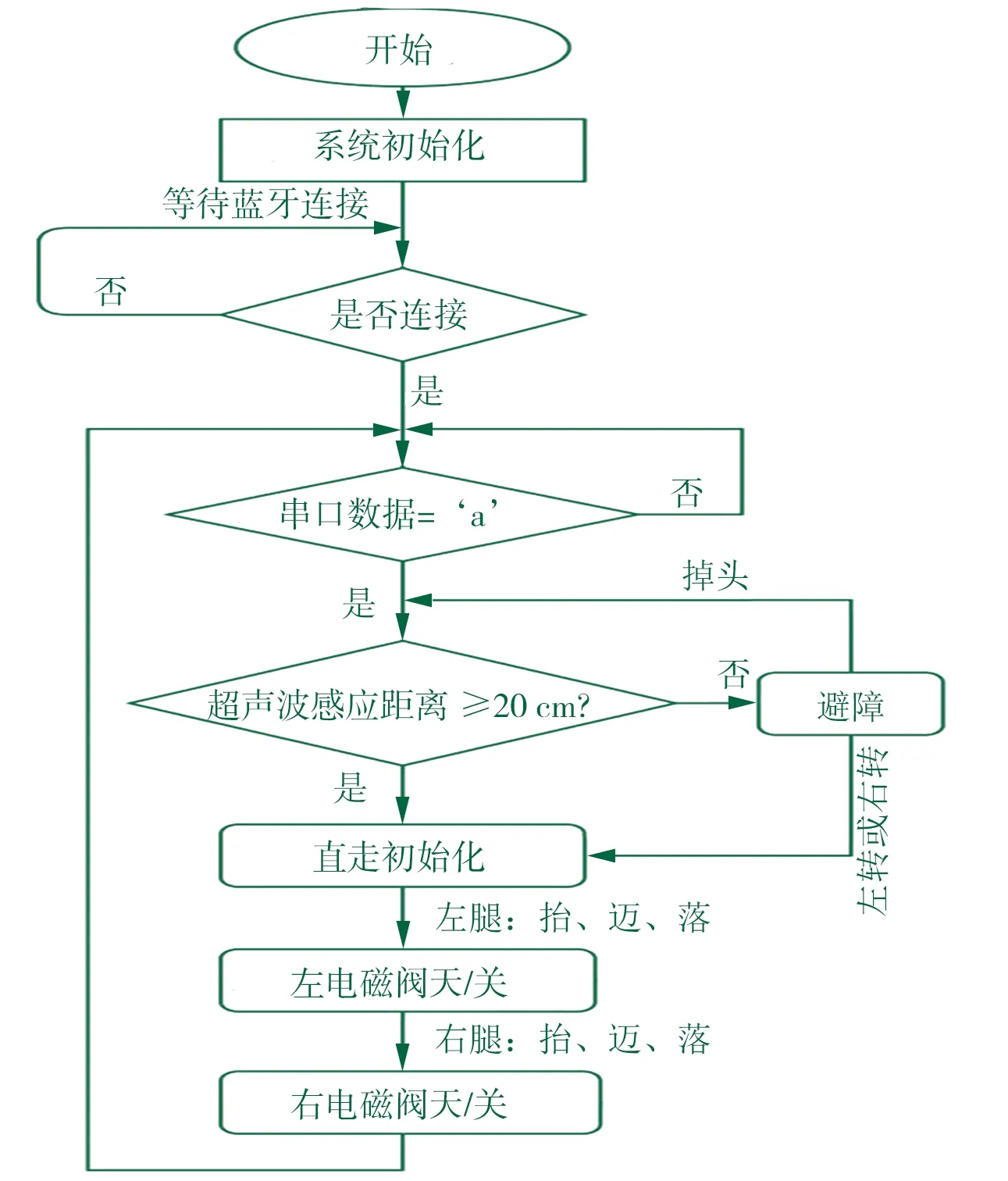
根据机电系统构成和仿生功能执行要求,构建如图5所示控制流程,打开电源开关后,首先对机体进行初始化,然后等待蓝牙连接更新系统数据,在此基础上利用串口通信执行驱动程序。避障功能通过超声波传感器测距来实现,当障碍物感应距离小于20 cm时,通过头部舵机左右摆动检测和选择行走路径。若左侧存在大于20 cm距离的行走空间,机体执行左转指令;若左侧无障碍空间距离小于20 cm时,避障模块执行右侧距离检测,此时,若右侧无障碍空间距离大于20 cm,机体执行右转避障,否则说明路径不通,机体直接掉头返回。
▲图5 控制流程图
仿生壁虎在平地机动时,若超声波传感器的无障碍感应距离大于20 cm,说明前行路径无障碍,机体随即启动直行初始化指令,为直走前行做好准备。在吸附爬墙时,机体通过两个电磁阀的开关来产生负压吸力,与此同时,各路舵机按照Trot步态有序控制左、右腿的抬、迈、落,由此实现仿生机械壁虎的移位换步与吸附攀爬。
3.3 硬件系统开发
以Arduino开源电子平台为依据 ,设计开发仿生机械壁虎硬件控制系统,如图6所示,Arduino主控板集成和扩展了降压模块(LM2596S)、电机驱动(L298N)、蓝牙模块(hc05)、气泵开关及电源端子等,并且通过I2C协议与舵机控制板建立通信渠道,进而实现对各路舵机的独立控制。
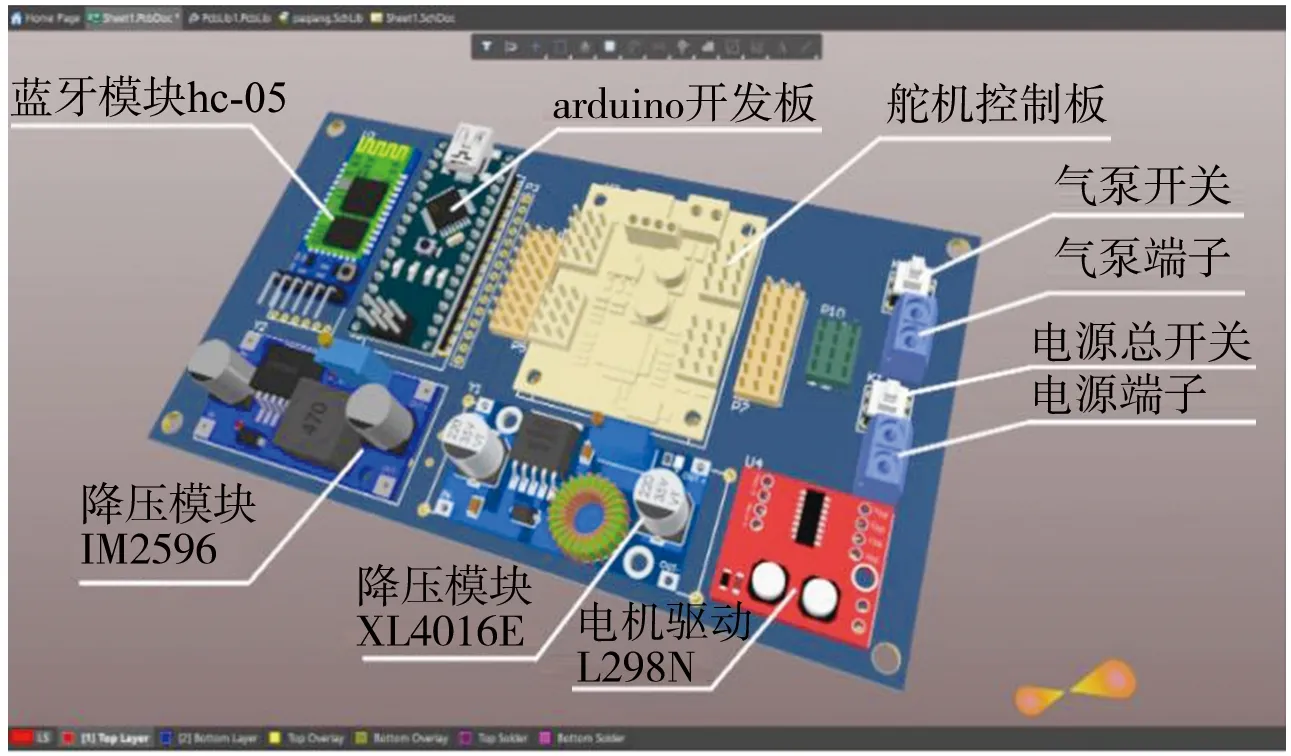
▲图6 电路硬件开发板
为了保证Arduino开发板和hc05蓝牙模块能够平稳供电,需要通过降压模块LM2596S对外接电源进行降压处理,降压模块LM2596S可负载5A大电流,以满足舵机工作时的峰值电流。系统控制电路原理如图7所示,由于舵机同时工作所需电流较大,所以电源方案采用串联系统供电(即:3节5C的18650锂电池),利用XL4016E降压模块将12 V电压降为6 V为9路舵机供电。

▲图7 控制电路原理图
4 仿生造型设计
在SolidWorks2020环境下对各仿生模块进行三维实体造型设计,从仿生学角度构建壁虎机械结构和功能特征[10],并通过虚拟装配建立仿生机械壁虎的数字样机,如图8所示,在头部前端面配置有两个圆柱形超声波模块(HC-SR04),在实现机动避障功能的基础上,形象地模拟了仿生壁虎的双眼构造。同时,将一个具有Wifi无线图传功能的摄像头安装在上头部前端正中间位置,可通过手机终端实时接收所拍摄的图传画面,使仿生壁虎具备了真正意义上的视觉系统。

▲图8 仿生机械壁虎数字样机总成
仿生造型需兼顾形态、功能及结构等多方面因素,而且在仿形设计基础上应尽量全面的实现壁虎的体态及功能模拟[11]。此外,为提高仿生机械壁虎的设计精度和可靠性,要求各三维实体零部件之间无干涉和过约束,并且从Toolbox设计库中直接调用螺钉、螺栓及螺母等紧固件。
5 腿关节功能构造
5.1 机构学分析
仿生机械壁虎腿关节三维构造如图9所示,其机构学原理为:舵机1通过转轴驱动大腿关节,使其绕Y轴作往复转动,由此实现壁虎在XOZ平面上的爬行转向与机动换位;通过上、下连杆拓展大腿关节和小腿关节构造,使其构成平面四杆机构,并由舵机2驱动下连杆绕Z轴作往复转动,与此同时,小腿关节在上、下连杆带动下在XOY平面内作升降运动,由此模拟壁虎在爬行过程中的抬腿动作。
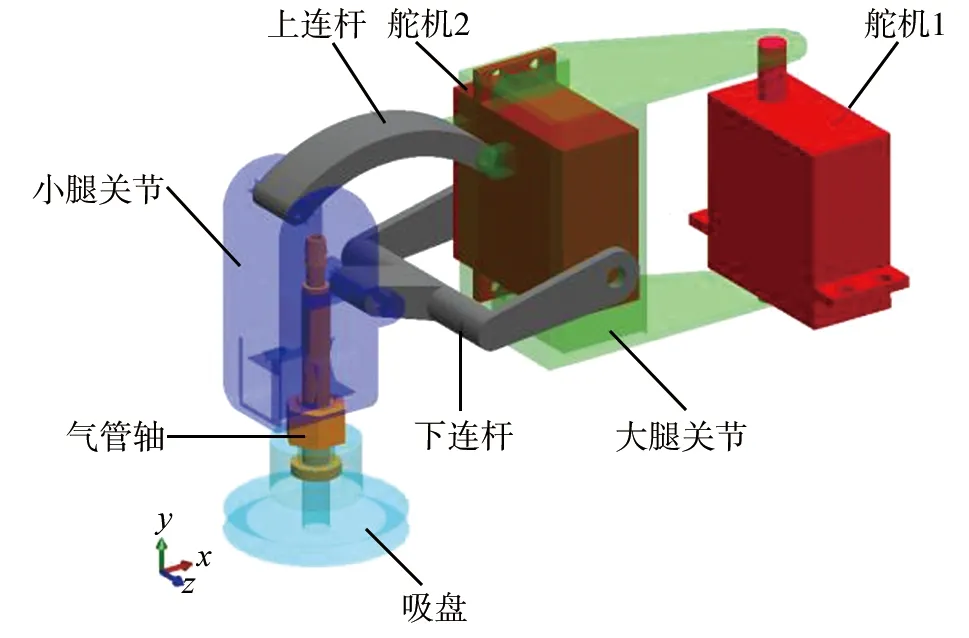
▲图9 腿关节三维实体模型
由腿部关节构造可知,舵机2、上连杆、下连杆与小腿关节构成一个平面四杆机构,其自由度计算方法如式(5)所示[12]。由分析可知,活动构件数目n=3、低副PL=4、高副PH=0,故自由度F=1。又因为舵机1使大腿关节具备一个转动自由度,所以整个腿部关节构造的自由度为2,与提供动力的舵机数目相同,说明腿部关节具有确定运动,符合机构学设计条件。
F=3n-2PL-PH
(5)
5.2 轨迹仿真
通过综合控制舵机1和舵机2的转速、转向及转角等关键参数,即可按照机构学条件实现仿生壁虎预期爬行步态。在ADMAS/View环境下对仿生关节运动轨迹进行仿真,已知所采用的舵机驱动转速约在(53~62)r/min之间,所以将舵机1和舵机2的转速均设定为60 r/min,并通过Step函数构建正反转Motion驱动,以此实现对大、小腿关节的独立控制。
Step函数通过三次多项式逼近海赛(Heaviside)阶跃函数,其构成如式(6)、式(7)所示。式中:t—自变量;t0—阶跃起点自变量值;h0—阶跃起点函数值;t1—阶跃终点自变量值;h1—阶跃终点函数值[13]。
(6)
(7)
壁虎爬行过程中,大腿关节处于按照Trot步态进行前后摆动[14],此时A、B、C、D点均为动点,其运动轨迹如图10所示,十分明显,各动点摆动轨迹均为圆弧段,其摆动角度在0~73°之间。从起始位置和终止位置来看,各轨迹线从长到短依次为A、B、D、C,且各段轨迹线光滑无干涉,说明大腿关节运动过程平稳,具有良好的机构传力特性。
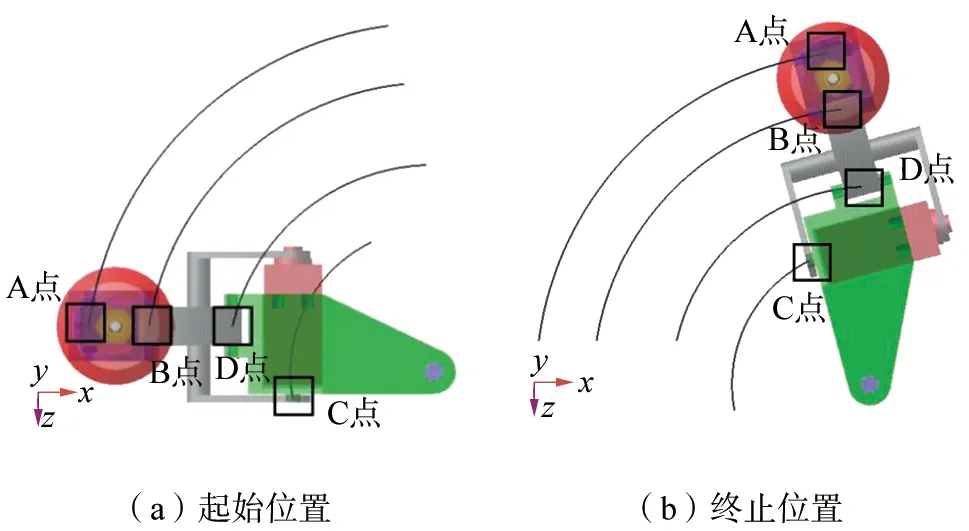
▲图10 大腿关节运动轨迹
与大腿关节不同,小腿关节的运动主要为升降状态,如图11所示,为了实现仿生壁虎的换步爬行,在小腿关节升降运动过程中,只有A点和B点为动点,而C点和D点则始终处于相对静止状态。通过后处理模块测绘可知,小腿关节从起始位置运动至终止位置时,A点和B点圆弧轨迹的角度区间为0~43°,吸盘抬升高度约为33.6 mm,且各构件之间无干涉或碰撞发生,能够很好地满足壁虎的移位换步要求。
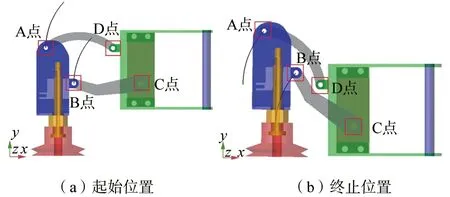
▲图11 小腿关节运动轨迹
5.3 关节应力与变形
在平地支撑条件下对腿关节构造进行静力学分析,利用WorkBench建立如图12所示有限元网格模型,该模型共包含51 021个单元和113 289个节点。根据仿生机构连接关系定义和施加约束条件,其中,驱动大、小腿关节的舵机(MG996R型)扭矩为1.274 N·m,各运动构件之间采用实体面组接触,并在铰接处沿轴向施加圆柱副约束。
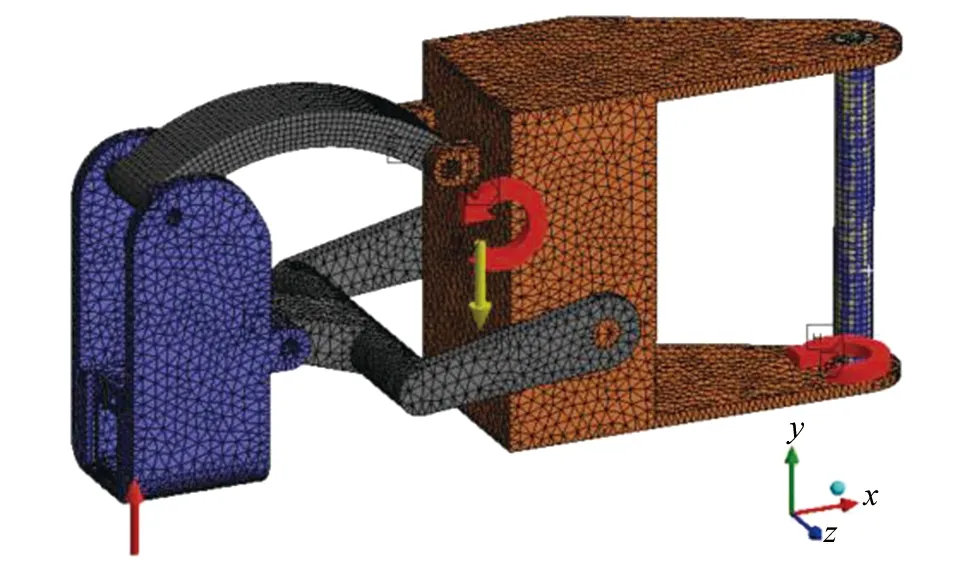
▲图12 腿关节有限元模型
为保持机体平衡,应至少有两条腿同时支撑于地面,因此,可按照式(8)计算作用于腿关节的静态载荷,式中:P0—支撑反力;Gm—机体总重;N—支撑腿的数量;S—支撑面积。已知机体质量m=1.35 kg,支撑面积S=251 mm2,则当两条腿起支撑作用时(N=2),根据式(8)可知,支撑反力P0≈26 354.6 Pa。
(8)
运行静力学分析计算,获得如图13所示应力和变形结果。分析应力图解可知,由于舵机扭力作用,使得大腿关节和下连杆的舵机连接端发生了明显应力分布,最大应力出现在下连杆一侧,约为15.49 MPa,如图13(a)所示。仿生关节构件材质为光敏树脂,均由光固化3D打印工艺制成。由于光敏树脂的拉伸屈服强度约为60 MPa,弯曲屈服强度约为75 MPa,远大于最大分布应力,所以腿关节构造符合强度设计安全。由静力变形结果可知,大腿关节和小腿关节的变形量接近于0,与之相比,下连杆横轴端附近区域发生了明显变形,如图13(b)所示,最大变形量仅为0.38 mm,不会影响腿关节的结构刚度安全。
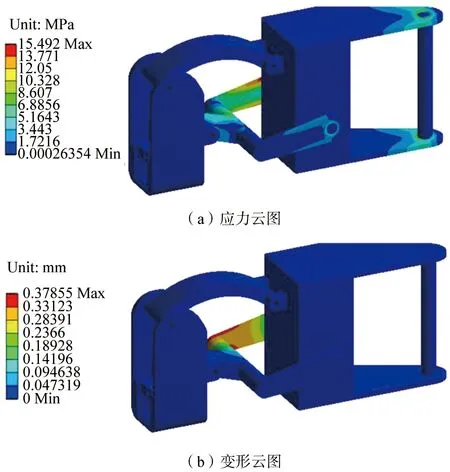
▲图13 静力学分析结果
6 实验测试
根据仿生壁虎的机械结构开展气电动布局,制作如图14所示实验样机,该样机总重质量约1.35kg,机体内部配装有Arduino开发板、真空泵、电池及其它相关电子元器件。壁虎腿关节驱动由两路舵机共同作用实现,其中,大腿关节采用扭力为13 kg·cm的MG996R舵机,小腿关节采用扭力为2 kg·cm的MG90S舵机。为提高仿生机械壁虎的机动性,在小腿关节还配装有可拆卸轮组,即当机体处于地面或其它地形时,可通过轮组替代吸盘进行快速移动。其它非标件如腿关节、头部、尾巴及连杆等均由3D打印制成。

▲图14 实验样机总成
仿生机械壁虎实验测试现场实拍如图15所示,主要包括吸附攀爬、远程操控、超声波避障和无线图传等,其中,远程蓝牙有效测控距离约为50 m~80 m,蓝牙模块(hc05)与Arduino开发板之间采用实时串口通信。壁虎头部最前端的超声波模块HC-SR04通过声波反射时间差计算障碍物实际距离,单片机接收到声波检测信号后会控制壁虎自动避开障碍物。

▲图15 仿生机械壁虎功能测试
在操控仿生机械壁虎时,首先需在手机终端与Arduino系统之间建立蓝牙连接,然后对控制系统执行初始化命令,使机体的运动、吸附、视觉、避障等功能处于就绪状态,在此基础上通过手机交互控制终端对其开展实验研究,以检验机体的各项仿生功能。多次实验测试表明,该仿生机械壁虎能够快速响应智能操控要求,具有良好的运行稳定性和机动能力。
7 结语
本文从仿生学角度准确模拟了壁虎的功能构造和运动形态,实现了仿生机械壁虎的“机、电、气、智”多维度一体化设计,并通过样机测试验证了仿生设计思路的正确性与可行 性,为爬行纲动物的仿生设计提供了创新思路和技术导引。相对于以往同类研究,该仿生机械壁虎不仅机动灵活、智能可控,而且同时兼容了吸附攀爬、自动避障、可视勘探及远程操控等实用功能,具有可期的实践发掘潜力与应用前景。
尽管如此,该仿生机体仍存在很大改进空间,如电源供应问题和高空作业安全性等。在后续研究探索中,可考虑采用光伏供电,以提高电源续航能力和户外环境适应性,同时应为机体配置智能降落伞,消除高空坠落安全隐患。
猜你喜欢
保健医苑(2023年2期)2023-03-15
快乐语文(2020年30期)2021-01-14
作文周刊·小学一年级版(2020年16期)2020-06-12
自动化学报(2019年6期)2019-07-23
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
创新作文(小学版)(2016年25期)2016-02-28
阅读与作文(小学低年级版)(2015年7期)2015-05-30
