无人水面艇关键技术及军事应用
2023-09-18 16:06:20徐筱波叶锴王登峰
广东造船 2023年4期
关键词:关键技术
徐筱波 叶锴 王登峰
摘 要:无人水面艇作为新兴武器装备,以其独特的优良性能完成海上各种军事任务。本文从通信、导航和航行控制系统三个方面,综述了无人水面艇的关键技术和军事应用。
关键词:无人艇;关键技术;军事应用
中图分类号:E925.6 文獻标识码:A
Key Technologies and Military Applications of USV
XU Xiaobo, YE Kai, WANG Dengfeng
( The 723 th Research Institute of CSSC, Yangzhou 225101 )
Abstract: As an emerging weapon and equipment, the unmanned surface vessel (USV) can be competent to undertake the various military tasks on the naval battlefield by virtue of its unique advantages. This article summarizes the key technologies and military applications of USV from three aspects of communication, navigation and sailing control systems.
Key words: unmanned surface vessel; key technology; military application
1 前言
进入21世纪以来,高新技术发展日新月异,军用武器装备领域也面临重大变革,并呈现出向无人化迅速扩展的新趋势,各类无人装备层出不穷,如空中无人机、地面无人作战车等,其中军用无人水面艇(以下简称无人艇)是一种集船舶设计、运动控制、人工智能、环境感知等技术于一体的无人化水上军用舰船。无人艇相较于传统有人舰船,具有以下优点:
(1)体积小、灵活性高、机动性强;
(2)功能更多元,建造与日常维护费用更低;
(3)能执行高危任务,避免非必要人员伤亡,降低军事行动敏感性。
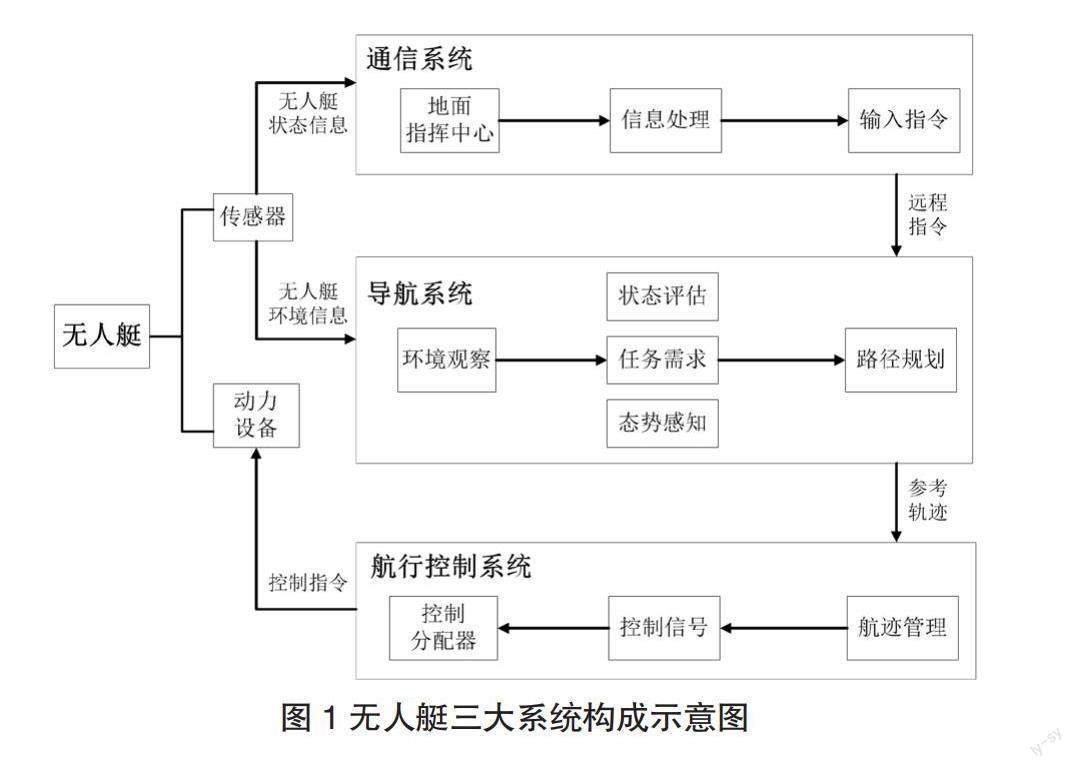
为实现无人艇自主感知水面态势、智能分析环境变化、精准控制航向轨迹,需要依靠通信、导航和航行控制三大系统,构成一个从侦查、判断、决策再到执行的完整链路。如图1所示,这三大系统相辅相成,其中蕴含的关键技术共同保障无人艇执行海上军事任务的可靠性。
2 无人艇关键技术
2.1 通信技术
通信系统是无人艇和远程遥控系统之间的桥梁,目前无人艇的通信技术主要集中在无线电通信、卫星通信和水声通信三个方面:
(1)无线电通信
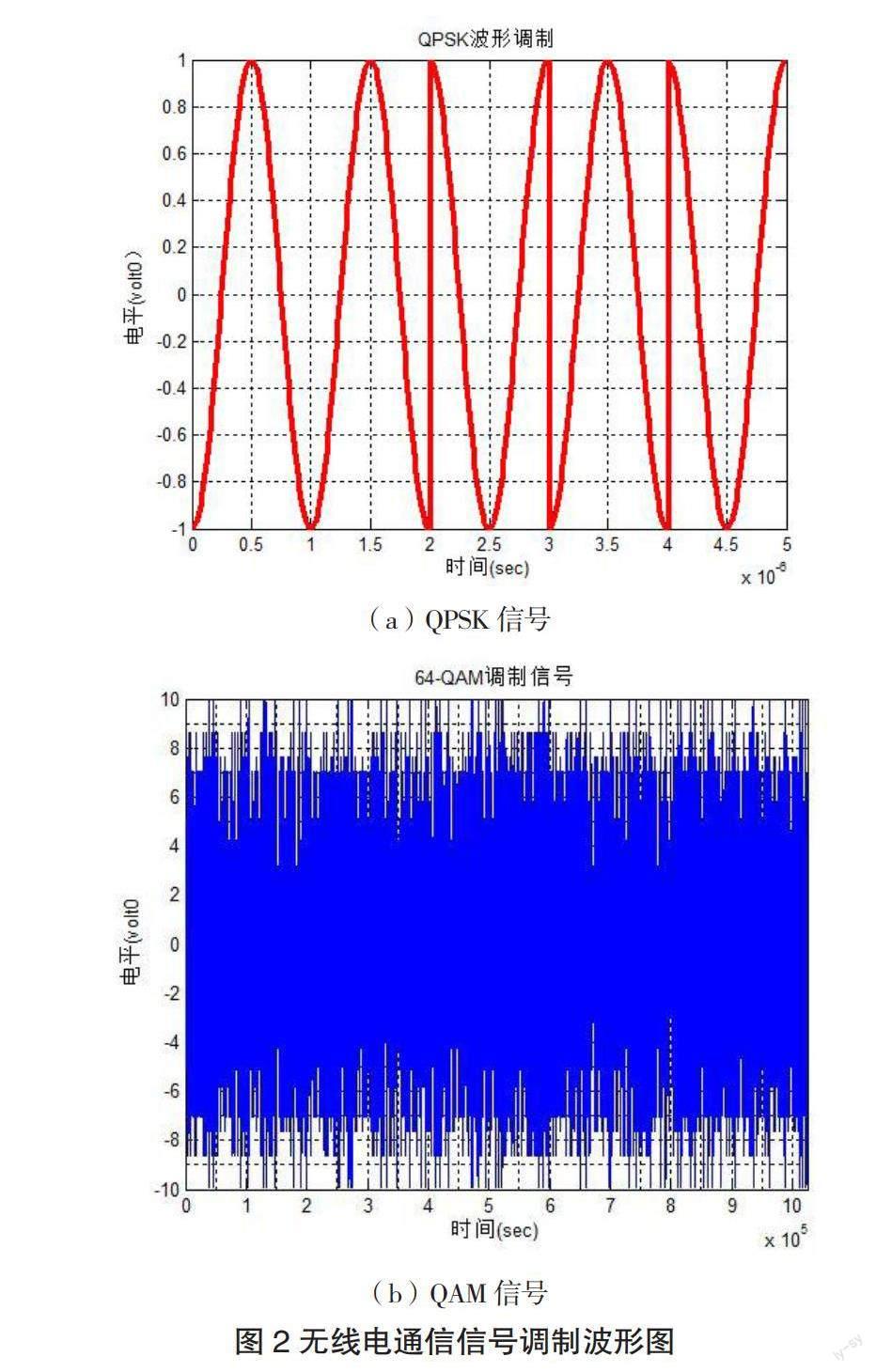
无线电通信多用于近距离高速率数据传输,其天线位于无人艇桅杆最高处,尺寸小、结构简单但增益较高,通常运用30~300 MHz波段的超短波,宽度是短波频段的10倍,通信量大且信噪比高;但无线电通信易受环境因素制约,在远距离会出现中断;常见的无线电信号,包括QPSK信号、QAM信号,信号调制波形,如图2所示;
(2)卫星通信
卫星通信多用于超视距数据传输,其天线置于船身后部,尺寸大、增益高并装配有伺服机构,采用Ku、Ka频段卫星信号,同时支持低轨宽带卫星通信与高轨窄带卫星通信,覆盖面积比无线电通信更大,但传输延迟也更大,终端功耗也较高;
(3)水声通信
水声通信多用于海底环境监测,其声头一般安装在船体底部,水下声信道与无线电信道相比,传播速度较低,且受海底环境噪声、海水信道随机多径干扰影响,信噪比低,通信效果较差,需通过扩频技术、混沌序列降噪算法、多路信号并行等方法提高声波传输效率。
无人艇通信系统具有上下行链路不对称的特点:其上行数据为无人艇传感器提供的自身状态信息;下行数据为指挥站对无人艇的远程指令信息。针对船体通信天线高度受限的问题,上行链路可使用窄带扩频技术,下行链路可采用正交频分复用(OFDM)技术。OFDM技术运用多载波调制,将信道分成若干正交子信道,使高速数据信号转换成并行的低速子数据流,从而减少码间串扰,保障信道均衡性;由于上行数据包含大量图像、视频信息,尤其是导航雷达中高分辨率视频需要至少4 Mbps的传输速率,自动雷达标绘技术相较于数据压缩,通过自动捕捉目标并以矢量形式展现避碰信息,在舰载数据处理评估方面更为高效[1]。
2.2 导航技术
导航系统提供无人艇的实时方位、航向、速度等参数信息,由各类传感器获取,如导航雷达、激光雷达、卫星定位设备、声呐、惯性传感器、视觉传感器等。以上传感器充当了无人艇的眼睛,要充分做好各类传感器数据的融合运用。
以LaneTo3.0导航模块为例,其采用MEMS惯性传感器与载波差分(RTK)卫星导航组合技术,将卫星导航的载波相位信息与惯性器件(三轴陀螺与三轴加速度计)的相对角运动与线运动测量功能相结合,通过多维扩展卡尔曼滤波技术,确定无人艇三维(航向、俯仰、倾斜)导航测姿。
LaneTo3.0硬件由卫星基带信号处理电路、射频阻抗匹配和滤波、MEMS惯性传感器、CPU处理器以及其他模块组成,通过深组合算法,实现在无卫星信号区域自动切换到纯惯性导航,持续定位;导航模块支持RTK差分功能,外部差分信息经过串口进入内部处理器,外部卫星信号经阻抗匹配和滤波,由基带单元处理得到本地观测量,并与基站差分观测量进行双差计算,以处理卫星钟差、星历误差、电离层和对流层误差等难以消除的系统误差,最终得到无人艇三维姿态、三维速度矢量、不间断累计路程等高精度定位信息。
通过各类算法的综合运用,无人艇实现了智能分析感知目标,判断环境威胁,根据任务要求动态调整,合理控制航向、速度,选取最优路径的目的:
(1)遗传算法
遗传算法是迄今为止应用最为广泛的路径搜索方式,它通过不断淘汰不符合条件的个体提高工作效率。但因其计算量庞大,在环境动态变化较大的场景中耗时较长,应对突发状况实时性差,主要用于全局路径的规划上[2];
(2)势能算法
势能算法与磁铁的作用相仿,使无人艇与目标点相互吸引,而与障碍物则相互排斥,从而快速形成局部最短路径,因其计算量较小,适用于计算临近水域航行路线[3];
(3)视线算法
视线算法起源于导弹制导,也受到无人艇导航借鉴,它的原理是使无人艇航向始终朝着目标点,降低因海流、风流产生的误差[4]。
2.3 航行控制技术
航行控制系统操纵无人艇的船舵和螺旋桨等动力设备,控制船体移动。海洋环境复杂多变,海浪易导致光学识别算法失效,风流会降低图像识别准确度,海杂波干扰目标探测,恶劣天气会引发船体轨迹异常或失控,因此无人艇航行的运动特性是非线性、大惯性、大时滞,其运动控制本质上是对复杂非线性与欠驱动系统的控制。
大部分船艇航行控制技术,使用的是理想化的线性数学模型,但实际上船舶的水动力系数会随时间和所处环境而发生改变,无法提前获取准确数值。近年来,许多新型鲁棒控制研究被运用于船艇航行控制技术中,如Lyapunov稳定性理论、鲁棒性增量平滑算法、广义动态模糊神经网络自适应性控制[5]等。然而结合环境干扰因素,尤其在高海况下各种扰动的耦合、流体阻尼和测量误差的增大,控制船体的难度也随之提高,所以深入研究不同海况下的控制模型,运用变论域控制策略和动态面控制技术,方能实现对无人艇航行的精准把控。
海上事故近六成是因碰撞产生,当前的避碰技术包括:动态窗口法、人工势场法和速度障碍法等;设计无障碍的局部路径,也可以通过激光雷达聚类分析点云数据寻求安全区域[6];而针对水下障碍物如浅滩、暗礁等的自主避碰问题研究才刚刚起步,为使无人艇驶向远海,必须遵守海上避碰规则,深入研究船艇超越、相向行驶、路径交叉等各种实际场景。
3 无人艇军事应用
3.1 通信数据链
无人艇的军事应用已经引起世界各国密切关注,诸多国家投入大量精力对其进行研究,重点针对如何实现无人艇与岸基控制站之间良好通信这一应用需求开展对应设计。
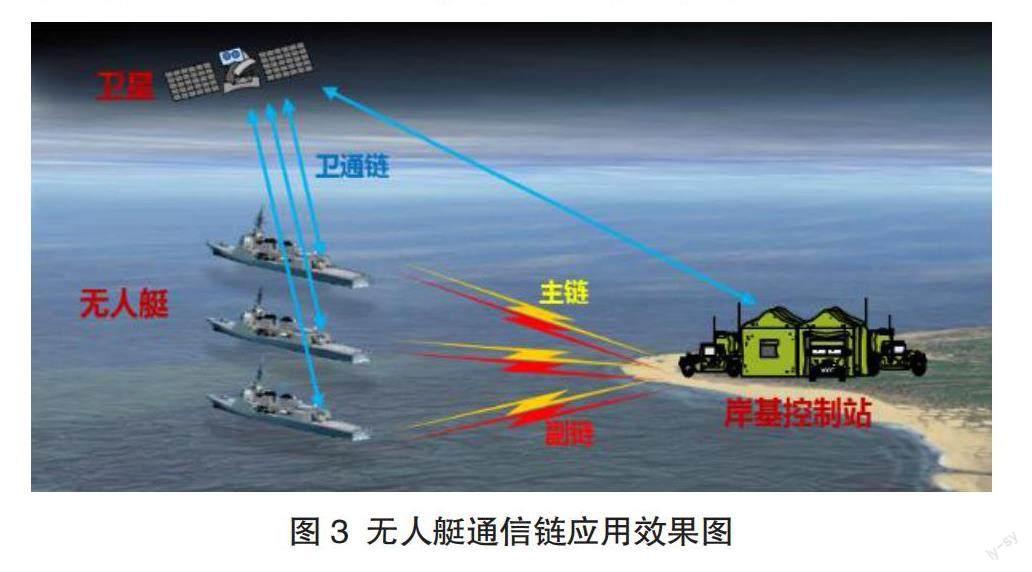
(1)岸基控制中心与无人艇之间,可采用点对多点的星型网络应用场景,通过拓宽数据链,满足作戰指令下达与无人艇数据回传的要求。整个系统由主链、副链、卫通链等多条链路通信组网,如图3所示;
(2)根据战场实际情况不同,系统可以自动切换通信链路,链路之间也具备自组网能力。其中,主链具备较大的通信容量,能给予控制站和无人艇较大的数据带宽;副链拥有更强的链路稳定性,在主链无法正常运作时,能提供基本的指控数据传输;卫星链可在超视距范围维持数据链的正常联通,使无人艇的作战范围大大提升。为了保证系统各成员节点能稳定及时地与主节点之间传输数据,主、副链可采用时分多址(TDMA)的设计方式,各成员节点与主节点通过固定的分配时隙发送数据;卫通链则采用频分多址(FDMA)的设计方式,有效保障各节点对数据传输的基本需求,并且减少设备体积、降低能耗。
(3)无人艇在复杂电磁环境下需具备抗干扰能力。在水上登陆战中,无人艇面对敌军岸基雷达释放的干扰信号,为避免通信数据链阻断,数据采集基站会向移动站连续发送差分改正数据,保证无人艇定位准确,并且用场强仪记录回传数据,分析信号强度,判断是否影响地面指挥中心。
(4)通信链路的网络安全也十分重要,有效的通信加密对无人艇平台来说必不可少。应用大数据分析建立网络安全防御机制,进行安全态势识别并终止网络入侵,包括从母港开始就持续保护无人艇不受任何形式的访问、未经授权的登船和操作,而不仅仅针对作战区域。
3.2 编队协同导航
鉴于无人艇体积小、速度快、隐蔽性好的自身优势,若能促成编队协同作战,则可实现集群打击和迷惑敌舰的作用,从而在攻防两端产生聚合效应。图4为中国企业云洲智能进行的一场大规模无人艇多艇编队协同性能测试。该测试由56艘无人艇组成的舰艇编队在复杂多变的海面状况下,完成了集群队形保持、队形自主变换、动态任务分配、协同避障等多个测试项目,呈现出无人艇鲨群式战术在海上军事行动中蕴含的无限可能。
在海上防空反导作战中,以有人舰艇编队为核心,可在防区外围布置舰空导弹无人艇群,在防区内层布置电子干扰无人艇群。当敌方发射反舰导弹时,运用无人艇编队协同导航,先用外围防空导弹进行硬杀伤,再通过诱骗、遮蔽等干扰手段进行软杀伤,由远及近、软硬兼施地建立起防空体系,实现纵深防御和梯次对抗,极大地延伸了编队防空反导区域。
无人艇编队协同导航的技术,难点在于人艇协同、艇间协同和跨平台协同三方面:人艇协同是操作员与无人艇在分布式状态下,通过收集编队整体信息和单个无人艇信息快速规划路径,需要做到准确且高效;艇间协同要求无人艇不只是根据自身所处环境自主制定决策,还需与其他无人艇随时保持信息交互,在协同航行时控制好艇间距;跨平台协同指无人艇与其它有人或无人平台协同作战,实现海陆空天多维一体化,多平台间共享信息与载荷,促使无人艇群更快发现战略目标,提高舰队导航效率,推动无人艇协同作战时的集成性[7]。
3.3 智能航行控制
随着无人艇及相关技术的日趋完善,在海战场上出现了更大尺寸、更久续航的无人艇,用以执行面向远海的军事任务。例如美国“海上猎人”号无人艇,其全长40 m、排水量达到140 t,能够持续航行18500 km,主要用于侦察和跟踪潜艇[8]。无人艇在执行军事任务过程中,需要独立完成环境感知、目标分析并做出智能化航行控制。
在反水雷战中,母舰派出无人艇进入雷区,无人艇先通过声呐系统探测并完成海底地形测绘,从中智能识别出锚雷、漂雷、沉底雷等不同的形态:对于锚雷,通常使用拖带扫雷器割断锚缆,漂浮到水面后引爆或者切割;对于漂雷,在定位后可以用机炮攻击引爆;对于沉底雷,通过释放灭雷器接触水雷将其引爆。由于拖带式扫雷需要无人艇以一定的速度驶过布雷的海面,机炮和灭雷器都会使无人艇被引爆产生的冲击波波及,这些都需要激光测距雷达测算出无人艇与水雷的距离,并在扫雷任务实施前智能规划好航线及航速。
在海域巡逻任务中,安防无人艇在航行过程中需要面对的海上目标既有岛礁等静态目标,又有船体等动态目标。基于目标跟踪法,无人艇智能分析目标种类、距离、移动速度、运动轨迹并结合自身状态,根据视野内多个目标的权重动态制定出局部路径。当遇到敌方舰艇来袭时,无人艇可根据敌方规模和动向做出智能判断,选择警示驱逐、快速反击或立即回港,保护巡逻海域安全,提升监管效能。
4 结束语
本文综述了无人艇的关键技术,分析了部分典型军事应用。在高新科技智能化浪潮的席卷下,无人艇有望成为传统舰艇的全新武器,在维护海洋主权的争端中大展拳脚。我国势必要加大无人艇的研发投入,加快建立标准体系,确保在未来海战场上争得一席之地。
参考文献
[1]李业,任鸿翔,王鹏志.雷达标绘训练与自动评估系统设计[J].船海 工程, 2017, 46(02): 180-184.
[2]刘佳男. 基于进化遗传算法的无人艇避碰系统研究[D].大连海事大 学,2 015.
[3]黎为. 基于预测控制的水面无人艇航迹跟踪方法研究[D].哈尔滨工程 大学, 2016.
[4]刘磊. 基于视线法的欠驱动无人水面艇路径跟踪控制[D].大连海事大 学, 2021.
[5]包涛,董早鹏,张波,韦喜忠.基于GD-FNN和参考模型的无人艇航、 向鲁棒自适应控制[J].船舶力学, 2021, 25(05): 598-606.
[6]周彤. 水上無人艇北斗导航与光学避障系统的研究[D].燕山大 学, 2018: 29-30.
[7]宋洋,毛建舟.多无人艇协同作战智能指挥控制系统研究[J].舰船电 子工程, 2020, 40(10): 1-4.
[8]李伟,李天伟.各国无人艇技术的军事化应用与智能化升级[J].飞航 导弹, 2020, (10): 60-62.
猜你喜欢
今日畜牧兽医(2022年10期)2022-12-23 06:22:06
今日农业(2021年8期)2021-11-28 05:07:50
今日农业(2021年13期)2021-11-26 11:50:54
现代畜牧科技(2021年3期)2021-07-21 08:41:50
落叶果树(2021年6期)2021-02-12 01:29:26
铁道通信信号(2018年7期)2018-08-29 01:17:06
现代园艺(2017年23期)2018-01-18 06:58:24
电信科学(2016年11期)2016-11-23 05:07:56
电信科学(2016年9期)2016-06-15 20:27:28
铁道通信信号(2016年1期)2016-06-01 12:10:17