以过约束空间机构构造的汽车侧门锁变模式电动开启支链
2023-09-17 04:18曲志洋杭鲁滨钟传磊
机械科学与技术 2023年8期
曲志洋,杭鲁滨,2,钟传磊
(1.上海工程技术大学 机械与汽车工程学院,上海 201620;2.上海市大型构件智能制造机器人技术协同创新中心,上海 201620)
5G 通讯、无人驾驶、汽车智能互联时代的到来引发汽车智能进入系统的升级换代[1-4],汽车侧门锁作为汽车智能进入系统的关键部件,其电动开启功能和支链研发成为亟待解决的关键问题。面向车门锁多功能需求以及狭窄空间限制,车门锁内各支链之间应满足运动相容无干涉,且空间排布合理;电动开启支链作为实现车门锁电动开启功能的核心机构,其运动可靠和稳定性关系到车门锁乃至车门进入系统的安全。文献[5]研发出一款具有电动开启功能的车门锁,以删除现有车门锁保险及手动支链来满足电动开启支链安装的空间需求,其代价为安全性有所降低;文献[6-7]将平面柔顺五杆机构应用于电动开启支链,提出了一种含变自由度力适应性复位组合柔顺副的车门锁机构;并对电动开启车门锁的传动机构连杆轨迹进行综合,得到了传动机构连杆输出点最佳逼近期望轨迹的机构尺寸。
针对汽车侧门锁狭窄空间多功能的需求,可变运动模式机构[8]构造电动开启支链是一种潜在的解决方案;Zlatanov 等[9]提出的可免重新装配完成运动模式切换的机构,能够通过挡块限位、奇异位置、极限位置等约束使机构变结构、变运动模式。近年来国内外学者对变模式机构的研究一般针对空间并(串)联机构较多[10-11]。Kong 等[12]针对多模式机构的类型综合,提出了一种多工作模式并联机构型综合通用方法,得到了多种具有可切换球面模态和平动模态的并联机构;Dai 等[13]提出了变胞机构的延伸和分类,有助于挖掘具有变胞特性的原创和衍生变胞机构;文献[14]综述了多模式机构在构型设计、运动模式及应用方面的国内外研究现状,并对多模式机构面临的挑战与发展趋势进行了展望。
为了更加有效利用车门锁空间、优化车门锁关键部件布置、提升高端多功能特征,将空间机构引入车门锁支链中;结合空间机构扫掠空间有效利用,可适用于狭窄空间的特点,提出具有变模式特性的柔顺空间RRPURR 机构作为开启支链;其在不同工况下能够呈现出不同运动模式,电动开启工况呈现为少杆RRURR 空间过约束机构运动模式,手动开启工况呈现为RRPR 平面机构运动模式;模拟仿真验证了该柔顺空间机构在汽车侧门锁机构中的适用性。
1 汽车侧门锁电动开启机构期望功能
汽车侧门锁传动机构及有待综合的电动开启支链如图1所示。

图1 汽车侧门锁传动机构及有待综合的电动开启支链Fig.1 Side door lock transmission mechanism in automobiles and the electric opening support branched chain to be integrated
结合汽车侧门锁300 N 密封力设计要求及实际工况,其A轴与D轴之间的开启机构期望功能如下:
1)根据图1所示的现有车门锁机构,所期望设计的开启机构应至少包含两簇轴线不平行的转动副;
2)车门锁在电动开启、手动开启、上解保险的不同工况,其各支链机构的不同模式运动是确定和稳定的;
3)考虑传动效率,开启机构采用转动副R、万向铰链U及球副S进行机构综合,在变模式时可采用移动副P进行模式之间的切换;
4)结合车门锁实际工况及空间需求,其电动开启支链应尽可能满足少副少杆、高刚度、扫掠空间相容的特点。
2 面向电动开启支链的空间过约束机构构型综合
以汽车侧门锁电动开启机构功能需求为设计目标,面向电动开启过程,进行单回路结构综合。空间过约束机构相比空间无过约束机构而言具有运动链短和运动扫掠空间较小的特点[15]。
2.1 电动开启机构拓扑结构综合
运动副、构件组成的车门锁空间开启机构,其机构自由度计算式[16]为
式中:F为机构自由度;m为机构运动副的数目;fi为第个运动副的自由度;ξ为单回路机构的独立位移数,包括独立旋转数与独立移动数。
根据锁内电动开启支链空间轴系配置约束,对开启机构独立位移旋转数及自由度进行单回路分析计算。
1)开启机构独立旋转数的确定
所设计车门锁开启链中的旋转副D和A运动副的轴线方向不同(如图1),其开启机构回路的独立旋转数为
为保证车门锁开启支链空间运动范围小且效率高的特点,尽可能选择运动副较少(不多于6个),方位特征集的独立旋转数目较低的机构,即开启机构独立旋转数确定为
表明开启机构所有运动副的轴线在两个方向上相互平行。
2)机构综合方案确定及自由度计算
车门锁待综合电动开启机构,如图2a)所示。根据开启机构设计需求、运动副不多于6及独立旋转数为2,得出如图2b)所示的开启机构构型方案。

图2 待综合电动开启机构和电动开启机构综合方案Fig.2 To be integrated electric opening mechanism and electric opening mechanism comprehensive scheme
图2b)为空间6R过约束机构,其结构可用符号表示为{RA‖RB‖RF-RE‖RC‖RD};考虑到机构包含两簇轴线相互平行的转动副且RF∦RE,对该单回路机构进行POC 集运算,得到机构的独立位移数ξ 为
式中 dim{M(t)}为机构的独立移动元素数,机构可实现空间三维移动,其独立移动元素数为3。将式(4)代入到式(1)中可得
所综合机构具有1自由度,2个独立旋转方向以及3个独立移动方向。
2.2 过约束开启机构的构型优化
1)开启机构尺度约束类型优化
为易于实现车门锁电动开启与手动开启工况的精确控制,优选开启支链应具有部分解耦特征,即电动开启机构具有部分自由度。
对图2b)开启机构的尺度约束类型进行综合,使两个不同方向的运动副轴线相互垂直,得到空间解耦过约束机构,表示为{RA‖RB‖RF⊥RE‖RC‖RD},即开启机构在相互垂直的两个方向具有独立运动,具有部分解耦特征,如图3所示。

图3 开启机构尺度约束类型优化Fig.3 Optimization of size-constrained types for the opening mechanism
2)开启机构结构尺度特征优化
为满足车门锁开启机构少杆少副的目标,对图3中机构的杆长尺度特征进行优化,以实现减少杆件的数量。比较空间R-R副与U副尺度类型发现,当R-R副间杆长尺度特征为0时,R-R副拓扑结构转化为U副;为实现减少杆件数量,令图3中{RA‖RB‖RF⊥RE‖RC‖RD}解耦过约束机构转动副E与F之间的杆长为零,优化了杆副数。
优化后的机构如图4所示,为空间RRURR 解耦少杆过约束机构,自由度为1,独立位移数为5,相较于图3机构具有更小的运动空间以及更优的轻量化特征,更适用于狭窄空间内的车门锁电动开启机构。空间RRURR 过约束机构作为开启机构能够满足以曲柄CD为原动件的车门锁电动开启功能。
2.3 空间开启机构的柔顺性及力约束综合
将空间RRURR 过约束机构嵌入锁内作为电动开启支链,虽可实现电动开启功能,但在车门锁手动开启工况中,棘爪盘AB驱动开启机构,转动副D由于电机输出蜗轮蜗杆的自锁性被刚化,单自由度空间RRURR 开启机构无法运动,不能实现手动内、外开启功能,即手动开启与电动开启支链运动不兼容。为了实现手动开启与电动开启支链的运动兼容性,需在空间RRURR 机构的基础上增加自由度,提高机构的柔顺性。
在转动副B处增设同轴滑槽,构造R、P复合副,得到2自由度空间RRUPRR 七杆机构,如图5所示。为提升单驱动空间七杆机构的运动确定性,在转动副B处设置扭簧TB,构造具有力约束特性的空间R、P柔顺复合副。空间RRUPRR 柔顺机构具有力复位特征,其在不同驱动、转动副所在滑槽不同位置能够实现机构的不同运动模式。

图5 具有柔顺特性的空间RRUPRR 机构Fig.5 Spatial RRUPRR mechanism with compliant characteristics
3 多模式空间柔顺机构运动模式分析
将柔顺空间RRUPRR 七杆机构嵌入汽车侧门锁,构建车门锁电动开启支链,实现在狭小空间内车门锁的电动开启功能。基于空间RRUPRR 机构设计的车门锁结构如图6所示。分与齿轮曲柄之间的啮合带动开启支链实现车门锁电动开启;此工况转动副B处于滑槽左端极限位置,滑槽P刚化;开启机构转化为空间RRURR 过约束机构,自由度为1,具有运动确定性。
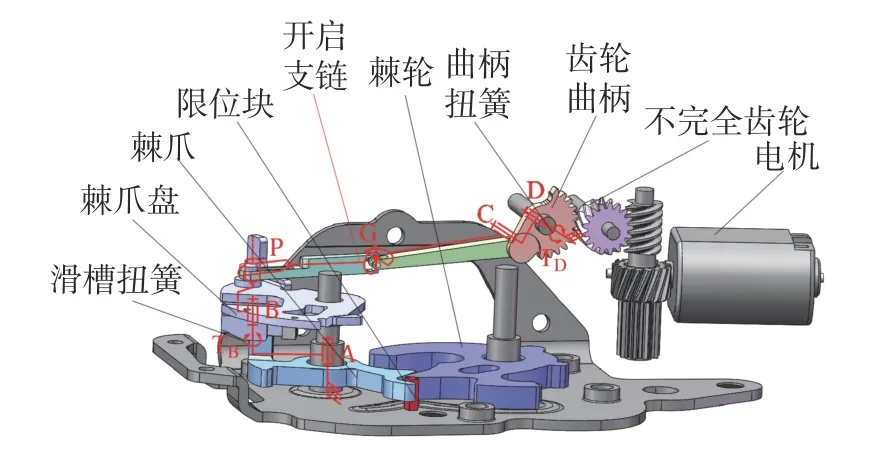
图6 汽车侧门锁机构结构示意图Fig.6 Schematic diagram of the automobile side door lock mechanism
2)电动开启复位工况:不完全齿轮转动到无齿部分,与齿轮曲柄脱啮,开启机构在扭簧TD的作用下复位;复位过程中滑槽与转动副B之间会产生相对滑动,开启机构转化为空间5R1P 机构,自由度为1;其复位运动过程中机构会受到滑槽柔顺扭簧的柔顺力约束,具有运动确定性。
3)手动开启工况:不完全齿轮与齿轮曲柄处于啮合状态,棘爪盘AB为原动件,转动副D在扭簧力与蜗轮蜗杆自锁力的作用下被刚化;开启机构转化为平面3R1P 机构,自由度为1,具有确定的运动状态;此过程的复位依靠曲柄扭簧与滑槽柔顺扭簧的共同作用。
各工况车门锁操作机构运动过程及其对应的空间柔顺七杆机构运动示意图如表1所示。

表1 各工况车门锁操作机构运动过程及其对应的空间柔顺七杆机构运动示意图Tab.1 Motion processeses of the operating mechanisms for various working conditions of the door lock and corresponding motion diagrams of the spatial compliant seven-bar mechanisms
空间柔顺七杆机构搭建的汽车侧门锁操作机构,在保证各支链之间互不干涉的前提下,利用不完全齿轮实现对转动副D的时序控制;利用不同驱动以及转动副B在滑槽不同位置实现多运动模式;各运动模式可对应实现开启机构对车门锁以下3种不同工况的操作。
1)电动开启工况:电机通过不完全齿轮有齿部
变模式空间柔顺七杆机构在单电机的驱动条件下,通过空间RRURR 过约束六杆机构运动模式实现了车门锁的电动开启功能;通过平面3R1P 四杆机构运动模式实现了车门锁的手动开启功能;并通过扭簧力的储能实现了驱动结束后的复位功能。
4 机构运动学分析
4.1 电动开启等效机构运动学分析
电动开启工况内,空间RRUPRR 机构等效为RRURR 空间,其结构及坐标示意图如图7所示。设杆1为原动件,θ1为输入转角,求各输出转角。

图7 空间RRURR 机构运动学模型Fig.7 Kinematic model of the spatial RRURR mechanism
建立RRURR 机构的各杆相应的坐标系,其中zi轴分别沿有关运动副的轴线,xi轴依次与相邻两个z轴的最短距离线相重合,如图7所示。空间RRURR 机构中z0,z1,z2相互平行、z3,z4,z5相互平行且z2⊥z3,可得已知参数α01=α12=α34=α45=0,α50=α23=90◦。在进行坐标变换时所用的方向余弦矩阵Cij需满足如下形式:
根据杆副之间的几何条件{z0//z1//z2}⊥{z3//z4//z5},得到:
将机构的向量封闭型分别向两簇轴向相互平行旋转副组中的z1和z4轴投影,可以写出:
联立式(7)、式(9),可求得:
联立式(8)、式(10),可求得:
为求输出角 θ0与输入角 θ1之间的关系式,将机构封闭矢量回路向z3轴投影,得出
联立式(11)~式(13),得到输出角 θ0与输入角θ1之间的关系。
4.2 手动开启等效机构运动学分析
手动开启工况,空间RRUPRR 机构等效为平面RRPR 机构,对平面RRPR 机构各从动件的位置和速度进行分析,建立直角坐标系,如图8所示。

图8 RRPR 机构矢量封闭模型Fig.8 Vector closure model of the RRPR mechanism
由机构矢量封闭回路得封闭矢量方程为
将式(14)的实部和虚部分离,得:
根据式(15)求得手动开启工况下输入角 θ1与输出角 θ2的关系式为
5 机构的动力学建模与仿真
为了验证空间柔顺RRUPRR 开启机构在汽车侧门锁电动和手动开启工况的可行性,在Adams 软件中,建立具有力约束柔顺运动副的空间RRUPRR机构仿真模型;通过求解棘轮棘爪执行机构和齿轮曲柄驱动机构转角变化曲线,分析电动开启、电动复位工况所需时间;通过齿轮曲柄驱动力随棘爪的变化曲线,分析该开启机构在车门锁中的可行性;手动开启工况下,以齿轮曲柄转角衡量手动开启与电动开启支链之间运动是否兼容。
5.1 Adams 仿真建模
在Adams 软件中建立柔顺七杆机构电动开启车门锁仿真模型,如图9所示。车门锁模型共包含4个复位扭簧,其参数设置见表2;齿轮传动机构传动比、齿轮曲柄节圆半径等参数如表3所示。

表2 扭簧刚度系数及预载荷参数Tab.2 The stiffness coefficient and pre-load parameters of the torsion spring

表3 齿轮传动机构参数Tab.3 Gear transmission mechanism cylinder parameters
5.2 电动开启工况仿真结果分析
电动开启工况中,电机驱动齿轮曲柄CD,逆时针旋转可将车门锁开启;分析电动开启中棘爪、棘轮和齿轮曲柄转角变化曲线可得到电动开启工况及其复位工况所需时间;分析棘轮棘爪接触力变化曲线可判断棘轮棘爪的接触状态。
图10为电动开启过程转角变化。0~90 ms 为电机驱动阶段,56~71.5 ms 为车门锁开启阶段,71.5~87 ms 为棘爪持续转动阶段,87~93 ms 为复位阶段;棘轮在71.5 ms 达到最大转角78°,门锁开启;86 ms 时棘爪到达最大转角23.8°,齿轮曲柄达到其最大转角66.2°,此时不完全齿轮与齿轮曲柄脱啮,棘爪与齿轮曲柄在扭簧力作用下复位。
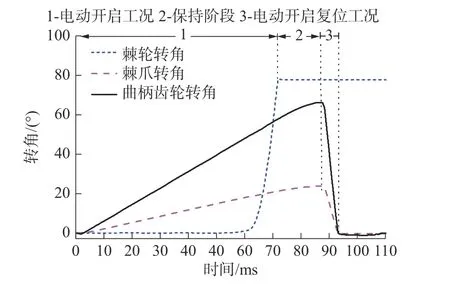
图10 电动开启过程转角变化Fig.10 Variation in angle during the electric opening process
图11为电动开启过程中棘轮棘爪接触力随棘爪转角变化的变化曲线,0~62.5 ms 为棘爪与棘轮脱离阶段,62.5 ms 棘轮棘爪完全脱离,此时棘爪转角为18.6°。棘轮棘爪脱离过程中其接触面积逐渐减小,其接触力在61 ms 时达到最大值24.6 N。
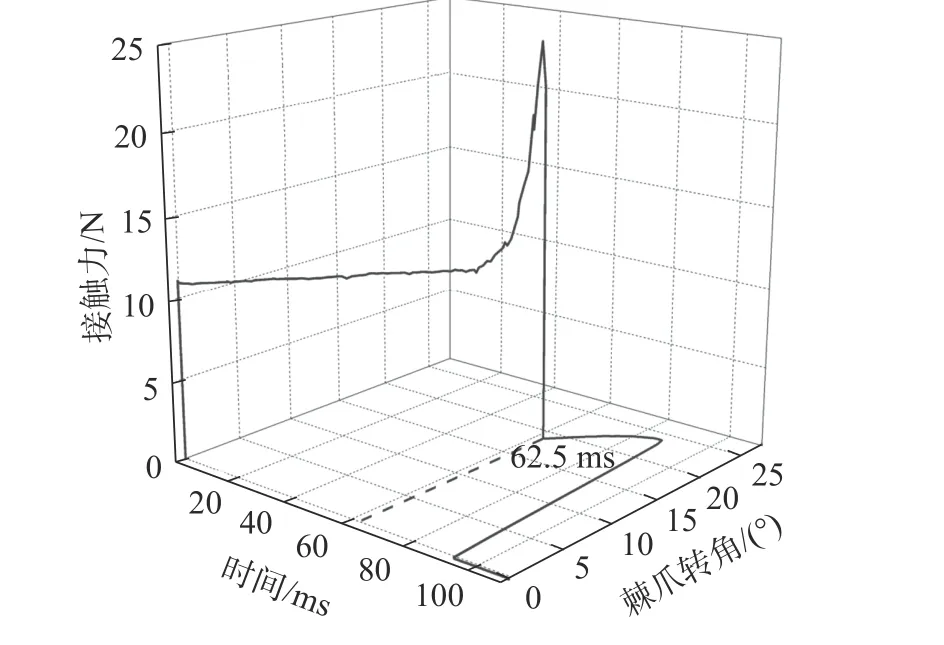
图11 电动开启过程棘轮棘爪接触力曲线Fig.11 The contact force curve of the ratchet and pawl during the electric opening process
分析车门锁机构在电动开启过程内齿轮曲柄驱动力随时间变化可间接反映电机驱动力矩的变化,如图12所示。分析可得:基于空间过约束电动开启支链的车门锁在电动开启过程中所需最大驱动力为60 N。

图12 电动开启过程中齿轮曲柄驱动力变化曲线Fig.12 Variation in the driving force of the gear crank during the electric opening process
通过电动开启过程中齿轮曲柄驱动力的最大值可求得电动开启电机所需最大转矩为
所需电机最大转矩为6.75 Nmm,小于选用电机额定转矩,电机选型符合要求。
5.3 手动开启工况仿真结果分析
手动内、外开启过程,门把手拉动线缆,驱动棘爪盘AB逆时针旋转,实现车门锁开启;此过程中棘轮与棘爪转角变化趋势与电动开启过程同理。图13为手动开启过程中棘爪与棘轮接触力随棘爪转角的变化曲线,棘爪盘以14°/s 角速度转动,0~1 500 ms为手动开启仿真时间,1 320 ms 棘爪与棘轮脱离,同时接触力达到最大值33.3 N。
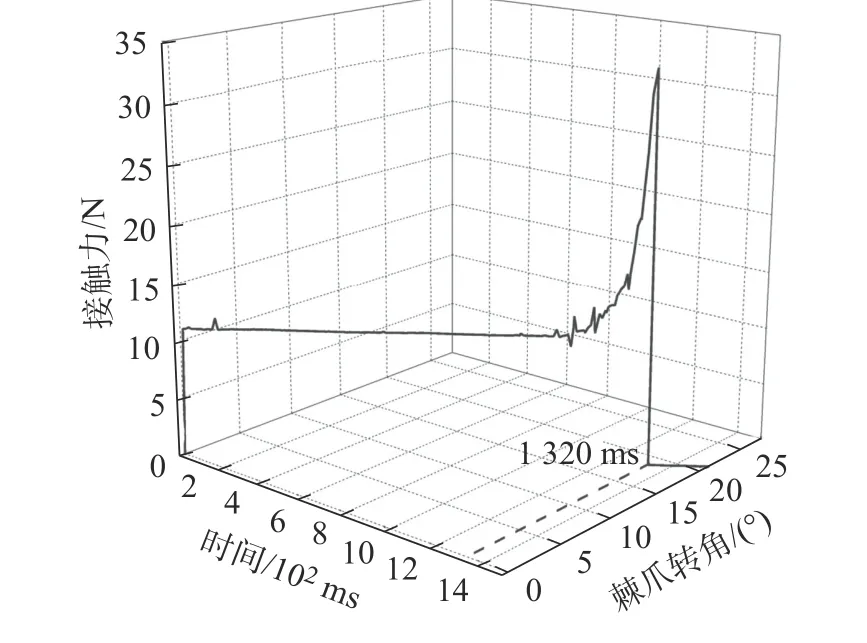
图13 手动开启过程棘轮棘爪接触力曲线Fig.13 The contact force curve of the ratchet and pawl during the manual opening process
手动开启工况下,将齿轮曲柄转角视作电动开启支链与手动开启支链运动兼容性的衡量指标,图14为手动开启过程中齿轮曲柄的转角变化。齿轮曲柄在手动开启过程中的最大转角为0.042°,仅产生微小转动,验证了蜗杆蜗轮的自锁特征,证实了手动开启与电动开启支链之间的运动兼容性。

图14 手动开启过程中齿轮曲柄转角变化Fig.14 Variation in crank angle during the manual opening process
6 结论
1)基于方位特征集提出一种空间过约束机构构型方案,通过机构解耦构型综合和尺度特征优化,构造了空间RRURR 解耦少杆过约束机构;并利用滑槽与扭簧构造柔顺副,综合出具有柔顺性的单回路变模式空间RRUPRR 七杆机构;
2)变模式柔顺空间机构具有多种运动模式,可实现模式切换;将其嵌入到汽车门锁,不同模式分别巧妙对应车门锁手动、电动开启支链的各工况;
3)仿真得到手动开启工况中齿轮曲柄仅发生0.042°的微小转动角度,表明了所研发的电动开启支链与手动开启支链具有运动兼容性。
猜你喜欢
航空发动机(2023年3期)2023-07-07
机械工程师(2021年12期)2021-12-22
航空发动机(2021年1期)2021-05-22
装备制造技术(2020年2期)2020-12-14
少儿科学周刊·少年版(2020年9期)2020-03-04
家庭影院技术(2019年8期)2019-08-27
发明与创新(2016年6期)2016-08-21
实用手外科杂志(2015年2期)2015-08-28
饲料博览(2015年4期)2015-04-05
北京航空航天大学学报(2014年1期)2014-12-19