
基于全球导航卫星系统的塔式起重机坐标系建立方法*
2023-09-16 09:49:40宋世军安增辉
起重运输机械 2023年17期
宋世军 颜 曦 崔 兵 马 磊 安增辉
1 山东建筑大学机电工程学院 济南 250101 2 山东金麒麟股份有限公司 济南 253600
0 引言
《中国制造2025》要求在建筑业推广智慧工地技术提高建筑业智能化水平[1],塔式起重机(以下简称塔机)作为施工现场的重要组成部分,对其各关键部位进行智能定位是实现智慧工地的关键。全球导航卫星系统(Global Navigation Satellite System,GNSS)技术在塔机上的应用对创建智慧工地具有重要意义,其利用实时动态载波相位差分技术能够采集三维位置信息[2],智能定位精度在动态厘米级水平,可以替代传统的幅度传感器、高度传感器、回转角度传感器,为实现塔机的智能化防碰撞与无人化起吊提供了技术支撑。
GNSS 采集到的信号是WGS-84 坐标系下的大地坐标信号,无法清晰观测塔机距离、方位角;同时,智慧工地防碰撞要求所有塔机都在统一的智慧工地坐标系中,无人化起吊技术需要将料场与施工现场的坐标与塔机的坐标相结合。为解决上述问题,首先设计信号采集系统采集塔机运动信号;其次通过坐标变换建立以塔机回转中心O为圆心,以正北方向作为x轴,以正东方向为y轴的塔机坐标系,将大地坐标转换为塔机坐标,以此采集到可清晰观测距离、方位角的信号;最后通过塔机坐标系解决智慧工地中的智能化防碰撞与无人化起吊中的坐标统一问题。
1 塔机信号采集系统设计
1.1 系统录入信息
塔机各部件位置需要系统输出的信息主要包括塔身顶端的位置信息、载重小车的位置信息、起重臂臂端位置信息、平衡臂臂端位置信息和吊钩的位置信号等。同时,GNSS 可以采集各位置高程信号通过与塔机基础平面高程信息做差而采集到塔机各部件的高度信号,采用无线传输模块对采集到的信号进行远程传输,通过采集塔机各部件的三维位置信息对塔机各部件进行定位[3]。
1.2 塔机信号采集系统设计方案
如图1 所示,塔机信号采集系统由信号采集单元GNSS 模块、信号处理单元、无线传输模块等组成。由信号采集单元采集塔机各部件位置、姿态信号,通过无线传输模块与地面进行通讯将信号传递到地面,再由地面根据信号处理单元,对塔机各位置进行可视化监视。

图1 塔机信号采集系统设计
如图2 所示,塔机信号采集单元1 安装于塔机的平衡臂臂端,塔机信号采集单元2 安装于塔机塔身顶端,塔机信号采集单元3 安装于塔机载重小车,塔机信号采集单元4 安装于塔机起重臂臂端,塔机信号采集单元5与塔机吊钩外框架固定。
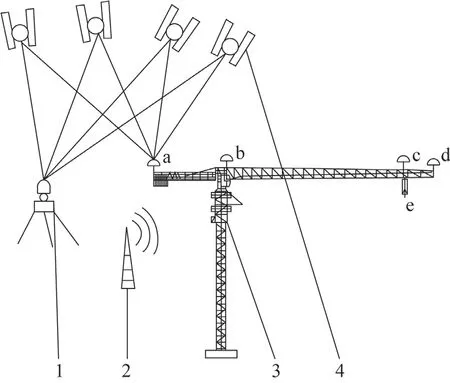
图2 塔机信号采集示意图
信号采集单元为GNSS 信息采集模块,通过动态载波相位实现差分动态测量,一台接收机在基站固定不动,另一台安置于运行的塔机上,2 台接收机同步观测相同的卫星,以确定运动点相对基准站位置,其精度的主要指标为平面10 mm+1 ppm,高程为20 mm+1 ppm,通过平衡臂上的观测点与基准站的观测点同时观测4 颗相同的卫星(其他位置同理)。在同步观测卫星相同的情况下,卫星轨道误差、卫星钟差、电离层折射误差和对流层折射误差对GNSS 技术产生影响,故需运用网络RTK 技术进行实时载波相位差分可有效消除或削弱这些误差。
网络RTK 技术是基于CORS 的实时载波相位差分定位技术,通过在某一区域内建立若干个GNSS 基准站,对该地区构成网状覆盖,联合若干基准站数据解算或消除电离层、对流层的影响,利用4G 网络发播GNSS 改正信息,对该地区用户进行实时载波相位差分定位[4]。此项技术可节约时间成本,扩大卫星信号覆盖区域,提高精度以及测量速度,能较好地对塔机各部件位置进行定位。
2 建立塔机坐标系
2.1 采集塔机信号
GNSS 采集的位置信号是在世界大地坐标系WGS-84 大地坐标系下采集到的,以GNSS 模块实测塔机的回转,可得到图3 所示三维状态塔机回转信号(B1,L1,H1),由大地经度、大地纬度、大地高程表示,通过平面投影可得到塔机二维平面回转信号(B1,L1)。
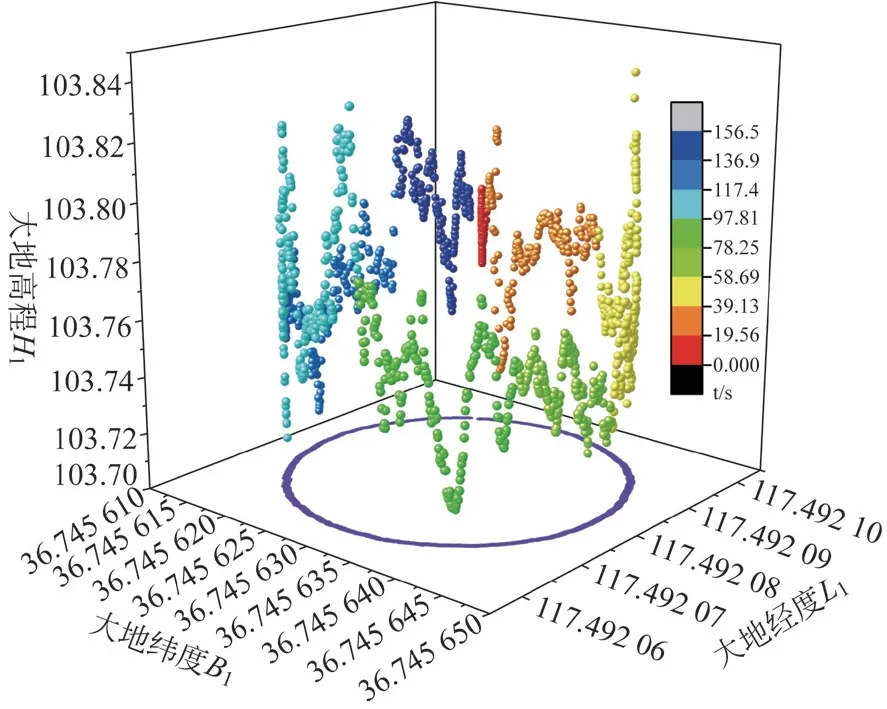
图3 塔机三维回转信号图
2.2 塔机回转中心获取
为便于塔机的施工定位,塔机坐标系需要以塔机回转中心为坐标原点,故需获取塔机回转中心。塔机回转中心可通过测量塔机基坑中心点测得,但此方法受到多种因素影响,对于已搭建的塔机则无法测得。为此,本文提出了对塔机二维平面回转信号进行线性拟合确定塔机回转中心坐标的方法[5],并确定圆的基本方程,即
通过最小二乘法拟合求出D、E、F,设塔机回转信号有n个数据,则有
将式(2)改写成矩阵的形式,即
进而得到
根据最小二乘法公式,求得矩阵A为
由此,已知矩阵A可找出塔机回转中心O,即
根据最小二乘法对塔机二维平面回转信号进行线性拟合(见图4),由此得以确定塔机的回转中心,并获得了塔机坐标系的坐标原点O。

图4 塔机二维平面回转信号及拟合图
2.3 塔机坐标系的设计方案
在WGS-84 坐标系采集到的大地坐标(B1,L1,H1)不能清晰地反映塔机各部件的位置信息,故需将其转换为能够清晰观察的塔机坐标系。
目前,我国统一应用的国家坐标系为2000 国家大地坐标系,若要获得塔机坐标系需将WGS-84 大地坐标系转换为国家坐标系,再由国家坐标系转换为塔机坐标。由于WGS-84 坐标系与2000 国家坐标系的经纬度误差小于1 mm,WGS-84 坐标系可直接替代2000 国家坐标系,误差不超过塔机定位精度需求。由WGS-84 坐标系转塔机坐标系具体流程如下:
步骤1:在WGS-84 坐标系下的大地坐标(B1,L1,H1)采用高斯吕格投影转化为图5 所示高斯平面坐标系,其平面坐标为(X,Y)。其中,X轴正半轴为高斯平面坐标系正北方向,Y轴正半轴为高斯平面坐标系正东方向。
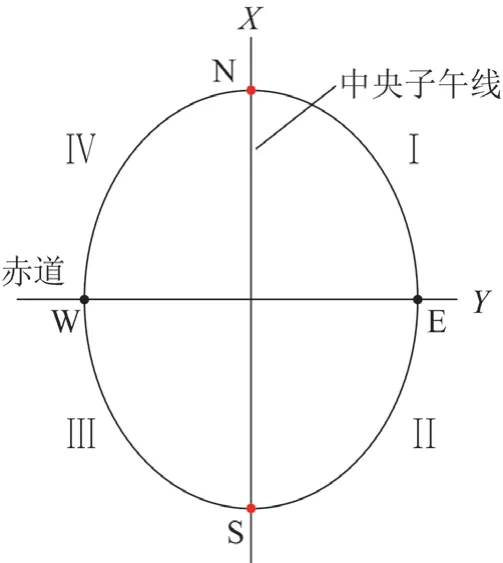
图5 高斯平面直角坐标系
由式(6)可知,利用高斯吕格正算公式进行计算可得到(X,Y)平面坐标,即
其中
式中:X'为中央子午线弧长,N1为卯酉圈的半径,l为点的经度L1与中央子午线的经度L0差值,e'为地球椭球第二偏心率。
通过式(7)可计算卯酉圈的半径,即有
式中:a1为参考椭球的长半轴,b1为参考椭球的短半轴,e1为参考椭球的第一偏心率。
通过3 度带投影计算求中央子午线经度L0,首先对经度L1除3 并取整求带号,中央子午线经度L0为带号的3 倍。通过代入塔机回转信号可得到中央子午线经度为117°,通过中央子午线弧长公式求中央子午线弧长,即
式中:a1为参考椭球的长半轴;e1为参考椭球的第一偏心率。
按二项式定理将(1-e2sin2B)-3/2展开为级数形式,然后对其逐步地进行积分[6]。
步骤2:将平面坐标(X,Y)利用平面四参数模型转换为塔机坐标系下的平面坐标(x,y)[7],即
式中:δ为方位角,J、K为需要求解的常量。
WGS-84 平面坐标(X,Y)与塔机坐标系平面坐标(x,y)平面四参数转换关系如图6 所示,通过使方位角δ角为0°,建立以塔机回转中心为圆心(0,0),以正北方向为x轴,以正东方向为y轴的塔机坐标系。
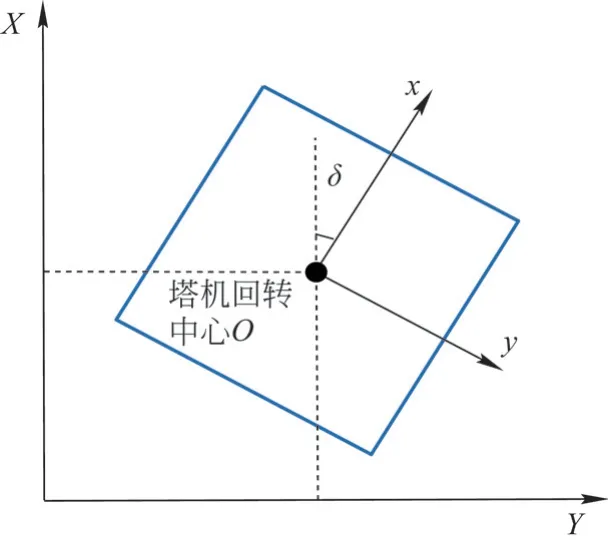
图6 国家坐标系与塔机坐标系转换关系
塔机回转中心在各坐标系下的坐标值如表1 所示,通过将塔机回转中心国家坐标系下的平面坐标(X,Y)与塔机回转中心在塔机坐标系下平面坐标(x,y)以及δ=0°代入式(9),得到常数J、K。
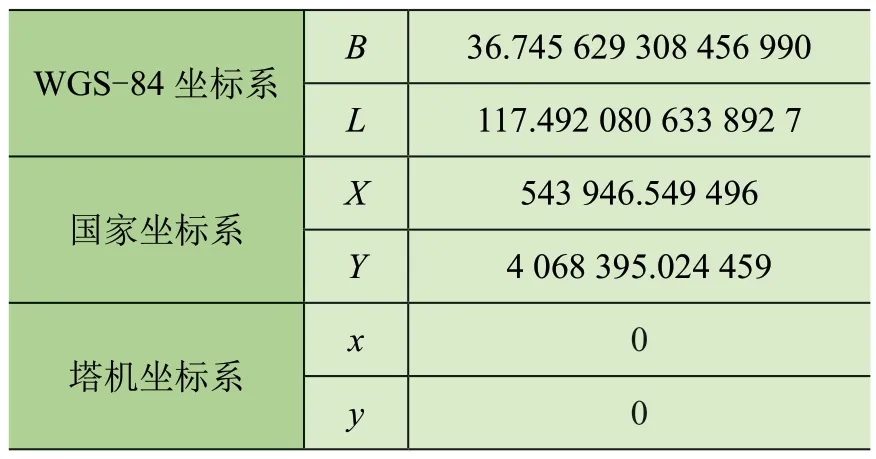
表1 塔机回转中心在各坐标系下的坐标
将J、K、θ以及塔机回转信号在国家坐标系的平面坐标(X,Y)代入式(9),得到如图7 所示以塔机回转中心为圆心、以正北方向为x轴、以正东方向为y轴的塔机坐标系下的塔机顶端运动轨迹,同时得到其方位角。通过此方法对任何该塔机采集到各部件的大地坐标进行处理,转换为建立的塔机坐标系中的平面坐标。
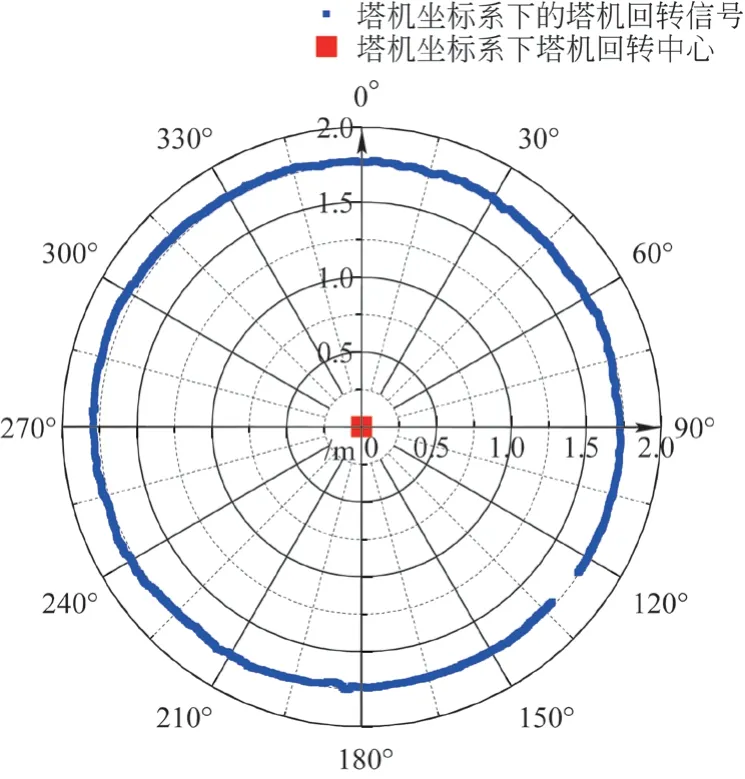
图7 塔机坐标系下的运动轨迹
3 塔机坐标系误差分析
3.1 塔机坐标系距离误差
通过比较大地坐标系中的距离与塔机坐标系中的距离,可以分析所建塔机坐标系的距离误差。在大地坐标系中,取塔机回转中心的经纬度坐标与塔机回转信号的经纬度坐标,通过式(10)计算二者的距离d[8],即
式中:R为地球半径,Ba、La分别为塔机回转中心的经纬度坐标,Bb、Lb分别为回转信号经纬度坐标。
在塔机坐标系中,通过勾股定理来求出回转信号(x,y)到回转中心的距离d2,即
对上述2 种方式计算出的距离进行求差计算,可得到图8 所示最终误差,其中最大误差为4 mm,故所建塔机坐标系满足塔机智能化定位中的距离精度。
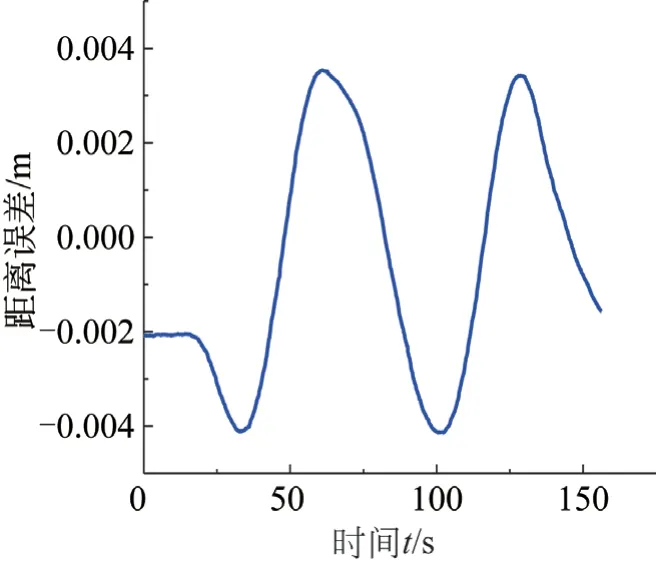
图8 塔机坐标系距离误差
3.2 塔机坐标系方位角误差分析
通过比较大地坐标系中的方位角与塔机坐标系中的方位角,可以分析塔机坐标系的方位角误差。在大地坐标系中,取塔机回转中心的经纬度坐标与塔机回转信号的经纬度坐标,通过式(12)计算塔机回转中心到塔机回转信号的方位角η,即
式中:Ba、La分别为塔机回转中心的经纬度坐标,Bb、Lb分别为回转信号经纬度坐标。
在塔机坐标系中,求每个回转信号(x,y)的坐标点与回转中心的连线同y轴正半轴夹角η2,即
对上述2 种方式计算出的方向角进行求差计算,可以得到最终的误差图9 所示,最大误差小于0.3°,故所建塔机坐标系满足塔机智能化定位方向的角精度。
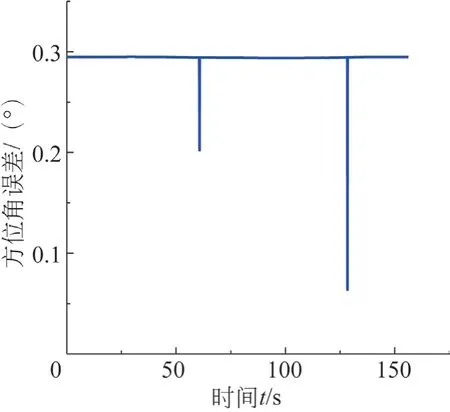
图9 塔机坐标系方位角误差
4 基于塔机坐标系的智慧工地实施
4.1 基于塔机坐标系的智慧工地坐标构建
通过建立塔机坐标系,可以清晰地观测1 台塔机各部件的坐标,然而图10 所示塔机实际施工现场布置有多台塔机,需要建立整个施工现场的坐标进行防碰撞监控[9]。另外,塔机在实际工作中需要将物料从料场移至施工现场,需要更加清晰地单个塔机工作坐标,建立既能反映整个施工现场的坐标,又能清晰表示单个塔机工作坐标的智慧工地坐标系,两者无法兼得。

图10 塔机平面施工图
本文提出通过对每台塔机建立塔机坐标系解决上述问题,建立单台塔机的坐标系,求解出J、K、θ,将在其他塔机关键部位(如臂端、回转中心,载重小车等)以及料场、施工现场采集到的大地坐标转换为平面坐标代入式(9),使其能在塔机坐标系中显示。由此,可以清晰地看到以单台塔机回转中心为坐标原点、以正北为x轴正方向、以正东为y轴正方向的整个施工现场情况。该方案不仅使整个智慧工地在统一坐标系下,还可实现单台塔机工作的清晰可视化。
4.2 基于塔机坐标系的无人化起吊模型
智慧工地的最终目的是实现无人化,运用GNSS 技术通过检测载重小车位置,由式(10)计算载重小车与塔机回转中心的距离可替代幅度传感器。通过塔机基础支撑面的高程H1与塔机顶部被测点的高程H2做差,可得塔机被测点的高度,从而起到高度传感器的作用。在塔机坐标系中,塔机回转中心与塔机臂端位置由式(13)获得回转角度信息,以此替代回转角度传感器。
将地面的料场位置、施工现场位置代入塔机坐标系,与塔机上载重小车位置、塔机中心位置构造出图11 所示塔机智能化起吊模型。
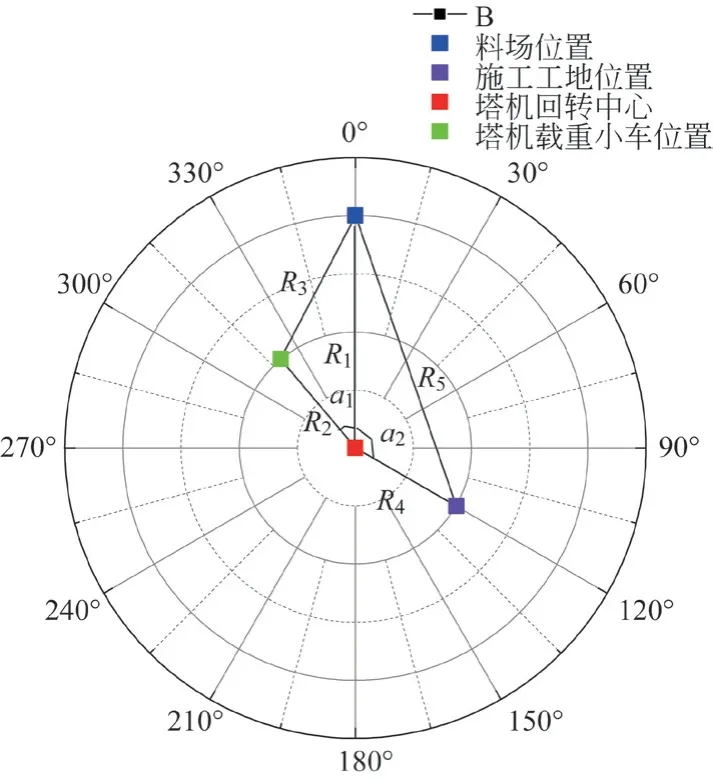
图11 塔机智能化起吊模型
已知料场位置、载重小车位置、塔机回转中心位置,由式(11)求得3 边长,通过余弦定理求得角α1,由此可得到由载重小车到料场需要旋转的角度,即
式中:R1为塔机回转中心与料场的距离,R2为塔机回转中心与塔机载重小车的距离,R3为载重小车到料场距离。
对R1与R2做差,可得到载重小车需要移动的距离;同理,也可得到料场位置到施工现场塔机需要回转角α2,以及载重小车需要移动的距离。
5 结论
本文提出了解决GNSS 技术在智慧工地建设中遇到的坐标不清晰、不统一的工程问题,通过采集塔机回转信号进行线性拟合得到塔机回转中心,并以此建立塔机坐标系,使塔机各部件的位置更加清晰;且经过误差分析,满足塔机智能定位要求。同时,基于塔机坐标系,同智慧工地其他位置创建联系,使整个智慧工地在统一坐标系下。
猜你喜欢
昆钢科技(2022年4期)2022-12-30 11:24:04
人民交通(2022年5期)2022-06-16 07:25:12
山东冶金(2022年1期)2022-04-19 13:40:44
湖南水利水电(2021年6期)2022-01-18 06:07:16
测绘工程(2021年5期)2021-09-13 09:01:38
科学与财富(2021年33期)2021-05-10 14:54:29
资源导刊(信息化测绘)(2019年4期)2019-05-18 03:58:46
测控技术(2018年5期)2018-12-09 09:04:14
建筑机械化(2015年7期)2015-01-03 08:09:04
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10 02:34:46
