京津冀地区产业联盟协作创新网络演化及治理策略研究*
——以高端装备制造业为例
2023-09-16 02:34谢海涛丁博达
中国科技纵横 2023年13期
肖 雯 谢海涛 陈 树 张 婷 丁博达
(北京市科学技术研究院科技情报研究所,北京科技经济信息联合中心 ,北京 100044)
0 引言
高端装备制造业具有技术含量高(产业壁垒高)、价值链区位高(产业附加值高)、产业链带动效应强(产业集群化)的特点,其学科交叉与知识密集的特性能吸引科技创新资源聚集,该类产业不但肩负着我国自主创新及成果转化的时代重任,而且其良好发展的势头能对区域内的生产力及创新力产生辐射效果,甚至能提升我国在世界整体产业格局中的话语权[1]。该类产业符合国家对京津冀协同创新的发展要求,也与北京市科技创新中心建设应具备的“聚集功能”“原创功能”“驱动功能”“辐射功能”“主导功能”相契合[2]。诸多发达国家已率先推出了国家产业发展战略,包括:“美国制造业创新网络计划”“德国工业4.0 战略”“英国制造2050”“日本产业结构蓝图”等。国内,国务院早在2010 年便下发了《关于加快培育和发展战略性新兴产业的决定》,“中国制造2025”更具体地强调了发展八大装备制造产业的重要意义。
鉴于高端装备制造业对区域一体化发展的重要作用,京津冀、长三角、珠三角地区陆续将该类产业视为区域协作创新水平提高的驱动力量,依托良好的协作创新载体形式,并充分借鉴既有经验,提升区域高端装备制造产业的协作创新能力,推动产业发展。
构建和优化高端装备制造产业的跨区域协作创新网络的研究,需要从影响产业联盟创新网络演化的内外部要素入手,分析并设计具有预测性、可量化的创新网络治理策略生成机制。该机制所生成的策略有利于构建和优化联盟治理体系,形成联盟中创新主体的网络效应,促进区域产业技术的协作与创新发展。
1 产业联盟中协作创新网络研究综述
高端装备制造业的技术复杂性和资本密集性,使其天然地符合并易于实现跨领域、跨地域的协作创新模式。例如,荷兰阿斯麦(ASML)公司的光刻机技术就诞生于EUV LLC联盟,该联盟成员包括英特尔、摩托罗拉、AMD、IBM、美国能源部及其隶属的若干国家实验室。近年来,我国也诞生了诸多装备制造领域的产业联盟,如中关村联创军民融合装备产业联盟、航天制造装备产业技术创新战略联盟等,其发展势头不一。
产业联盟中形成的合作网络对提升不同创新主体间的协作创新水平有至关重要的意义[3],联盟网络中衍生的各类关系能促进知识流动、技术创新、成果转移与转化、市场拓展,让联盟中的各方主体取得更大收益[4],也为联盟协同创新注入了动能。不过,竞争与合作共生,联盟中创新主体之间也存在难题,致使创新协作受阻。因此,对产业联盟等创新合作组织中的创新网络进行积极地治理与优化,提升协作创新效率的举措为业界所重视[5]。
将学界众多学者已有的研究归类描述为“分析法”与“模拟法”两种思维,来进行阐述。前者以静态视角专注于创新网络的当下状态,分析网络受各类因素影响的程度;后者以动态视角面向创新网络的未来发展变化,借助仿真和模拟分析结果,以提出针对时下情境的策略与建议,对方法的具体介绍如下。(1)分析法。分析了影响产业技术创新联盟网络协同创新的各类要素,包括目标要素、主体要素、资源要素、过程要素等,构建各要素对协作创新影响的模型,旨在优化与重组创新要素,以提高协作效能[6]。马辉等整理了影响产业联盟协作创新的50 种创新要素,并结合建筑产业特色筛选了24 个创新影响因素,进而基于社会网络分析法解析了诸多因素的相互关系及重要程度[7]。刘毅等以政府参与治理下的联盟中的创新网络为目标,使用自然语言处理技术,研究了国防产业联盟中创新网络受政府政策影响的趋向度[8]。(2)模拟法。目前多位学者的研究主要有两种。第一种模拟法考虑了网络结构对网络演化的作用,忽略了创新主体对网络演化的能动性。例如,赵泽斌等构建了国防科技产业联盟协同创新网络的框架,分析了不同网络结构参数对网络演化状态的影响[9]。曹霞等研究了不同社会网络结构下的技术创新扩散结果[10]。第二种模拟法则基于博弈论,充分考虑了创新主体及其相互关系对网络演化的作用。例如,廖名岩利用博弈论方法对新兴产业集群内企业间的竞合关系进行建模,综合运用囚徒博弈和雪堆博弈,揭示了新兴产业集群内创新主体间的复杂联系、新兴产业企业协同创新演化路径及特点[11]。郭本海[12]、张宏娟[13]等也运用该方法,研究了产业集群内的其他竞合关系。孟凡生等从同类企业间的竞合关系出发,基于演化博弈论研究了高端装备制造企业数字化升级的策略[14]。上述研究具有较强的“后验性(从结果到原因的推论)”,相较于第一类方法,通过此类方法通常能得出更为新颖的结论。
通过对产业联盟协作创新网络的研究分析,可以发现已有研究仍以定性讨论要素对联盟网络产生的影响为主,相对缺乏以定量方法来衡量具体治理策略对网络演化所产生的影响的研究。故本文基于复杂网络上的演化博弈仿真来度量治理策略对网络演化的影响,探究其生成治理策略的有效性与预见性。
2 产业联盟创新网络治理策略的生成机制研究
本文以课题研究所形成的数据与成果为依据,包含京津冀地区双创示范基地中的32 个装备制造产业联盟的调研数据,如汽车轻量化技术创新战略联盟、天津生物医药装备产业联盟、河北省电力装备产业技术联盟等。以问卷的方式来进行调研,主要获取5 类信息,包括:(1)联盟基本属性(专业领域、发起机构、成员类型、运行年限、注册资金等);(2)现行的联盟创新机制(5 分制评分);(3)预期的联盟创新机制(五分制评分);(4)各类机制施行的难度评估(5 分制评分);(5)科技产出统计(项目、论文、专利、软件著作权等)。将所有统计数据均做归一化处理。并在接下来的3 个小节中,阐述了联盟网络治理策略生成的3 个主要步骤。
第一,基于联盟调研数据,提取各治理策略间的关联关系,以便后续生成的策略具有系统性和统筹性;得到联盟治理策略与其创新主体科技产出之间的关系,以用于衡量所生成治理策略的效能。第二,针对需要治理的联盟,选择与其特征相似的联盟,以提炼可用于参照的种子策略,尔后基于得到的策略关联对种子策略进行优化,同时根据专家经验对若干种子策略进行主观筛选。第三,基于复杂网络上的演化博弈,对候选策略进行逐个仿真,对策略给创新网络带来的预期影响进行模拟,从而展望策略未来的效能,以确定最优策略。
2.1 京津冀装备制造产业联盟创新发展影响因素数据分析
从课题以及相关研究中洞悉影响产业联盟协作创新水平的诸多因素。主要从5 个角度“外部条件”“内部机制”“资本保障”“制度保障”“文化保障”及其之间的相互关系进行分析。外部条件构造了创新的环境;内部机制是创新的源泉与驱动力;资本保障提升了创新的规模与高度;制度保障维护创新的良性循环;文化保障维持了创新的可持续性。同时结合具体政策实施情况和联盟实践经验,将5 类要素细分为20 个子要素,如表1 所示。

表1 影响产业联盟创新的要素
对表1 中被调研的联盟各要素进行了3 项评分,分别为“当前现状”“未来愿景”“施行成本”。其中,“当前现状”评分越高,代表该治理指标(创新要素)在联盟中的实际施行程度越高;“未来愿景”评分则代表联盟认为该治理指标施行的理想程度;“施行成本”评分则代表了联盟认为贯彻施行该治理指标的成本,如时间成本、资源成本、资金成本等。
i代表上述20 个治理指标的编号,将某联盟对指标i的“当前现状”“未来愿景”“施行成本”的三项评分分别记作:Currenti,Expecti,Costi。因此,可用集合{Current1,Current2,…,Current20}代表该联盟当前的协作创新治理策略(Strategy)。联盟中某治理指标贯彻得越彻底,意味着其施行成本也越高,该治理策略的施行成本Cost可计算为公式(1)。
将全部32 个联盟的治理策略评分记作:{Strategy1,Strategy2, …,Strategy32},抽取其中所有的未来愿景评分,形成未来愿景评分矩阵,矩阵元素Expectji代表联盟j对施行指标i的期待程度。
研究发现,联盟中的治理策略从来都不是独立存在与施行的,各策略之间存在着关联与依赖,例如,信用评价机制与知识产权保护机制之间存在“强相关”,若联盟中的某企业不尊重伙伴的知识产权,则其信用必然受损;同时,信用评价机制与信贷支持力度存在“弱相关”,若上述企业信用受损,则对其信贷支持的力度也应降低。考虑到政策间的依存与互扰关系,相较于针对具体暴露问题的“专项政策”,“一揽子政策”更适用于主体特征不一、合作关系复杂的协作创新组织,如北京“科创30 条”。
通过对课题中资料及数据的“关键词共现”的分析,也可印证上述论点。关键词共现代表两类事务的关键词共同出现在相同报告分析中的频率,用该指标度量4 类创新要素间的关联性,如表2 所示。
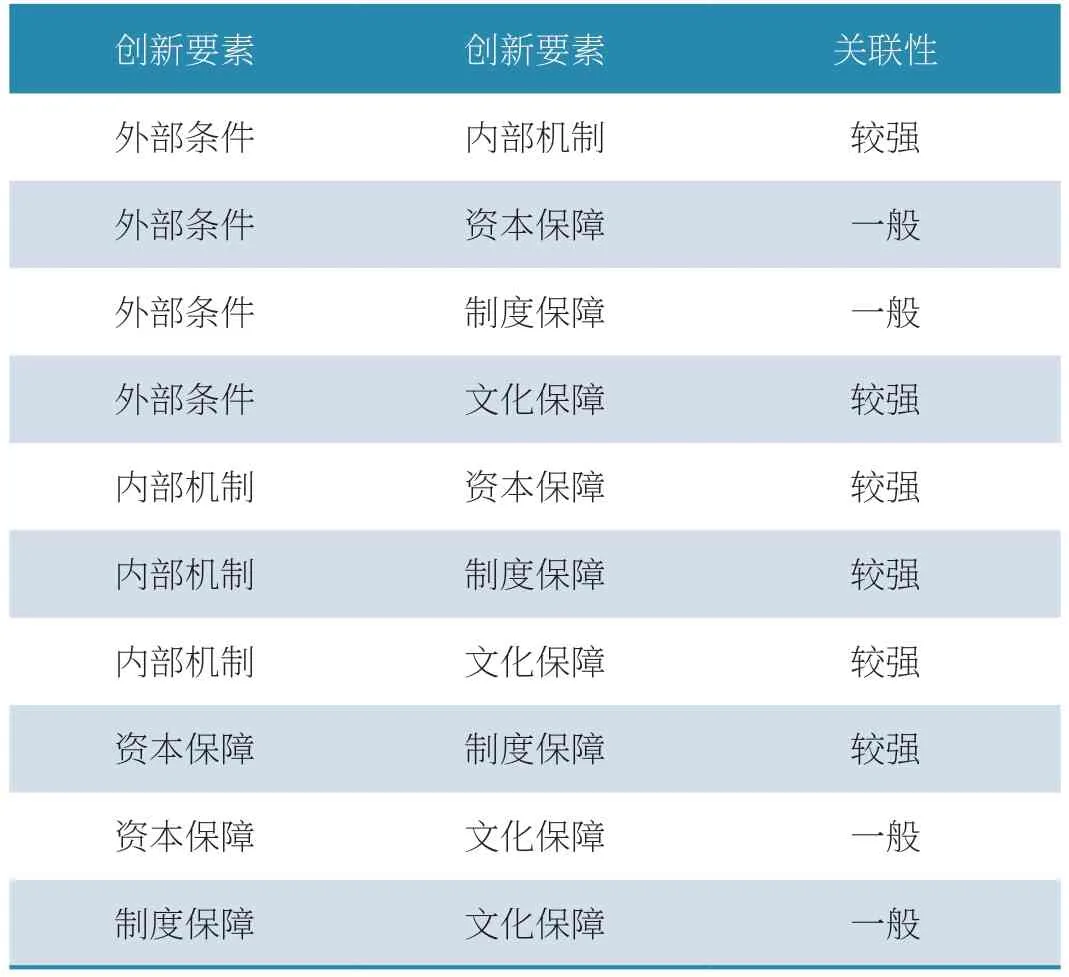
表2 5类创新要素间的关联性
鉴于创新要素间普遍存在关联,为了精细化地对策略进行优化,特提取评分数据中20 个指标之间隐含的190 对“相关性”,本文基于未来愿景评分矩阵中列向量Expecti之间的余弦相似度来计算,其含义是:联盟对两个指标的评分愈相似,则两指标越应该同步(同等力度)施行,其计算公式如下。
经过相似度计算,可得到如下所示的治理指标相似度矩阵M,矩阵元素Mpq代表指标p与指标q之间的相关性(相似度),该矩阵是对称矩阵,即Mqp=Mqp,且其对角线元素为1。
矩阵M 也可用网络图的形式直观表示,图中节点表示指标,连接表示指标之间的相似度,接线越粗代表相似度越高,为了清晰,删除了相似度较低的连接,如图1 所示。
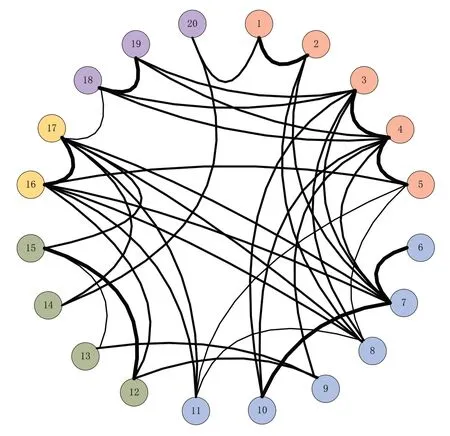
图1 联盟各治理指标关联关系图
接下来,若将联盟j的基本属性记作Attributej,将联盟中单个创新主体的平均科研成果产出记作Outputj,则可以通过数据挖掘算法来分析联盟产出与其固有属性及当前治理策略间的关系,如公式(3)所示。由于联盟基本属性及治理策略包含枚举型、布尔型、数值型等多类型数据,因此,本文使用数据挖掘工具Weka(www.cs.waikato.ac.nz/ml/weka/)中的随机森林算法[15]来挖掘其与科研产出的关系。
随机森林可被视为一组决策树的集合,在获得输入数据后,利用每棵树单独地进行判断,然后所有决策树投票生成最终输出结果,本研究所得的随机森林的其中一颗决策树如图2 所示。
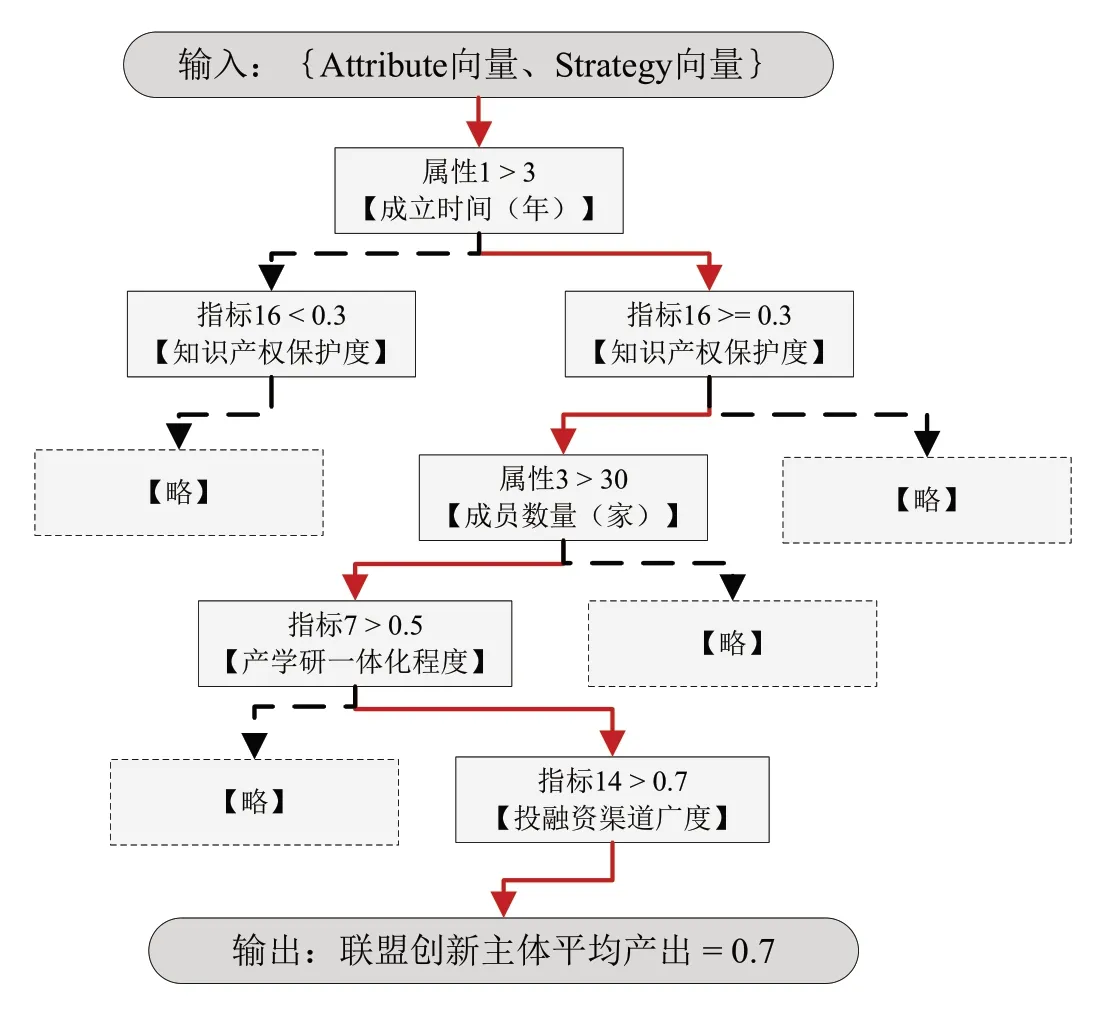
图2 联盟属性及治理指标的科技产出决策树
该决策树说明若联盟运行时间久、成员规模大,在具有较好的知识产权保护、投融资渠道、产学研一体化条件下,其科技产出相对较好。本文基于随机森林生成的结果,将联盟创新主体产出与联盟属性及治理策略的部分数据进行分析,结果如表3 所示。

表3 单个创新主体的科技产出与联盟属性及治理策略的关系
2.2 联盟创新网络治理策略的初选与优化
为获得适合目标联盟的最优化产业联盟治理策略,计算出可用于选择和评判的候选策略集合。候选治理策略满足3 个条件,包括:(1)目标联盟的备选策略要参照与其属性相近的现有联盟采取的策略;(2)备选策略要体现联盟成员的愿景与预期,考虑不同治理指标的内在逻辑关联性;(3)备选策略要顾及施行后的实际采纳情况,能推动联盟中的创新主体更多地达成合作。
首先,将目标产业联盟的所有属性记作AttributeT,已有32 个产业联盟的所有属性集合记作{Attribute1,…,Attribute32}。若给每个具体属性赋予一个权重,如给联盟建设资金设置较高的权重,然后根据公式(2)中的相似度计算方法,可获得k个与目标产业联盟在属性上较为相似的联盟,将这些联盟对应的当前治理策略(种子策略)记为{Strategy1,...,Strategyk}。
其次,为体现出联盟期盼的策略之间的隐性关联,采用种子策略向量与相似度矩阵M相乘的方法,以使得不同策略指标的施行程度按照其关联性得以扩散,采用三级衍生的办法,使每个种子策略衍生为3 个优化策略,如公式(4),最后共得到4k个策略。
最后,需要对上述优化后的策略进行面向合作博弈的进一步筛选,使用专家访谈法确定20 个策略指标给采取策略的主体带来的收益与付出的权重(基于用多元线性回归进行校验)。使用加权求和法计算出治理策略给创新主体带来的整体收益Gain与付出Pay,如公式(5)所示。
如果Gain>Pay,那么保留该策略,反之删除。其含义是:对联盟中的创新主体来说,若遵循某策略的收益大于支出,才会选择合作。
2.3 基于复杂网络演化博弈仿真的最优策略生成
经典博弈论,博弈双方被假定是完全理性的,且对博弈中的收益矩阵信息完全了解。在现实状况下,上述假设通常并不成立[16]。演化博弈论(Evolutionary Game Theory)打破上述“完全理性”的苛刻约束,将博弈理论与动态演化过程结合起来,以分析从个体行为到群体行为的形成机制,研究群体行为的演化趋势及稳定性。演化稳定策略与纳什均衡存在关联,代表群体所处的状态是稳定的,不受小规模策略变化的干扰。为更加贴近现实,学界将演化博弈进一步深化为复杂网络中的演化博弈研究[17]。研究者通常会设计博弈细节,包括博弈者、策略、收益矩阵、策略动态复制规则,尔后使用计算机仿真工具建立上述网络模型和模拟博弈活动,进而观察与诠释网络中节点的状态,及群体采纳某策略的程度。本文亦遵循上述思路。
根据优化后的策略集合,计算出主体采纳各策略所获得的收益Gain和支出Pay。由于Gain大于Pay,因此,用“雪堆博弈”来对联盟中创新主体之间的协助创新进行建模。在该博弈中,若参与创新的双方都遵守承诺、精诚合作,则科技产出会顺利进行且双方能够共享科技成果,在同等收益的情况下共同承担研发成本与风险;若参与创新的一方背弃承诺、坐享其成,会导致虽然也有一定量的科技产出,但创新成本是由持合作态度者独立担负的,会有损后期合作;如若双方均不合作,互相欺瞒,则不会有科技产出且双方收益均为零。该博弈中的收益矩阵适于描述联盟中创新主体间的科研协作创新场景,其收益矩阵如图3 所示。
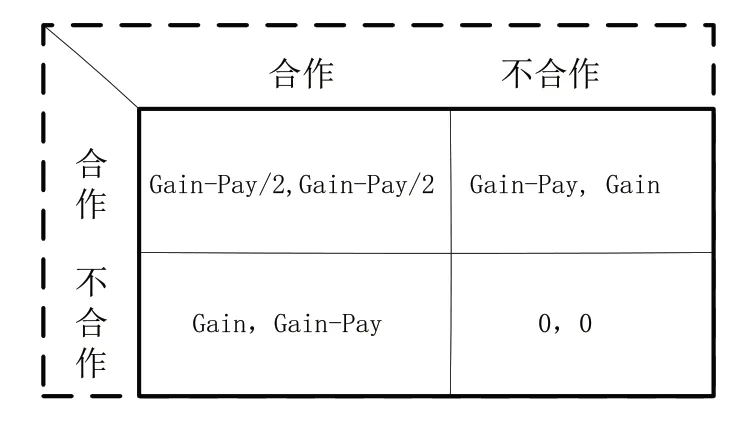
图3 联盟中协作创新博弈的收益矩阵
在复杂网络演化博弈仿真程序中进行博弈演化的过程中,创新主体将计算每轮博弈后的净收益,也会计算与其相邻的创新主体(博弈对手/合作创新者)的平均净收益,若前者小于后者,则该主体会认为当前采取的合作态度会导致其在联盟中吃亏受损,进而决定变更策略。当演化博弈稳定后(网络中的合作者比例相对稳定后),可统计得出合作者占比,记为P。P代表着在联盟在施行治理策略时,联盟中的创新主体对治理规范的接纳程度。因此,结合前文所述的策略成本及单位科技产出,最优的治理策略应满足公式(6)。
即:最优策略是4k 个候选策略中使得联盟取得最大科技产出净收益的策略。上述所有步骤总结为图4 所示的流程图。
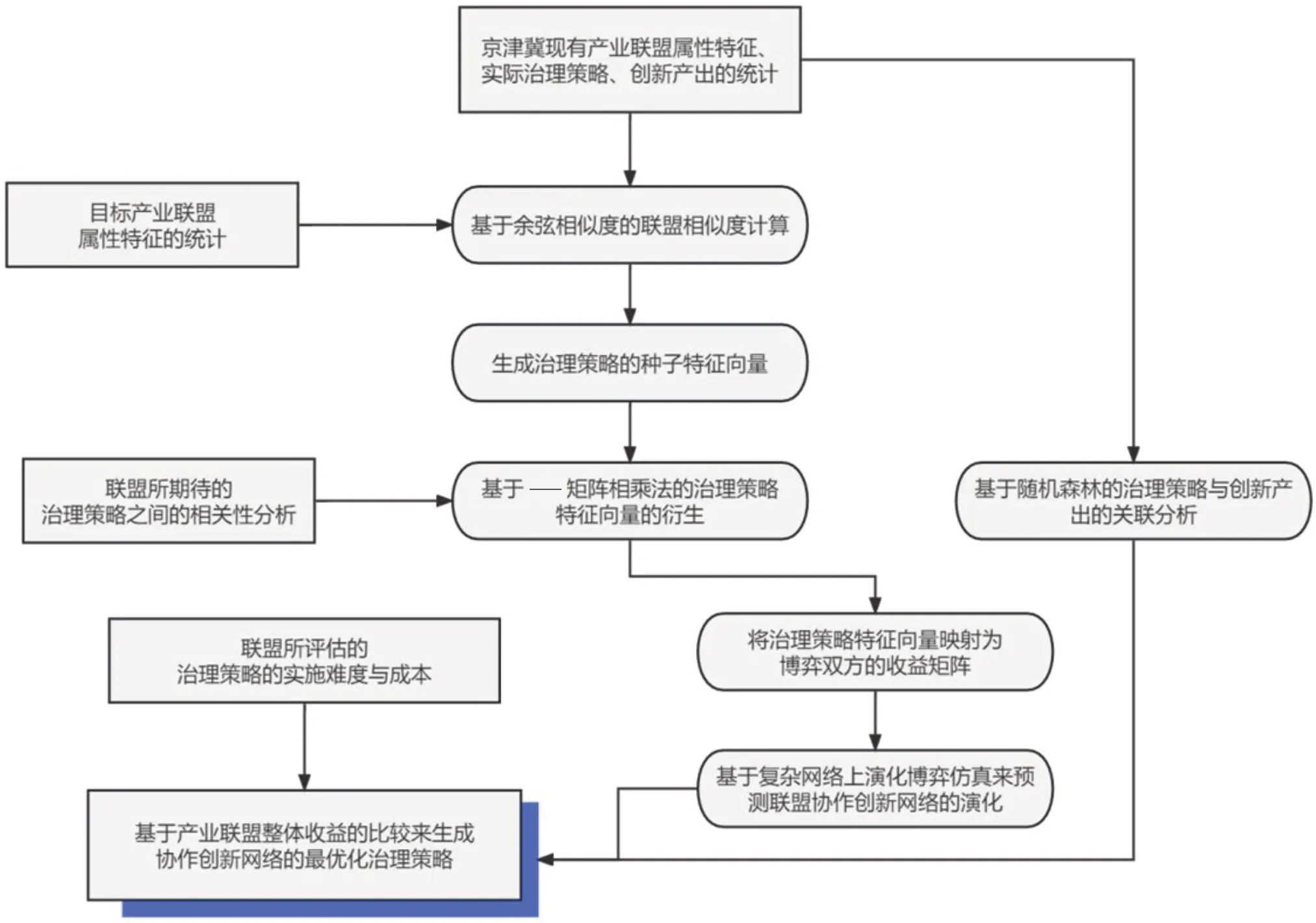
图4 产业联盟协作创新网络的治理策略生成机制
3 联盟治理策略生成机制验证与结果分析
3.1 复杂网络上演化博弈仿真实现
业界已存在若干构建此类仿真工具的程序与框架,如NetLogo(ccl.northwestern.edu/netlogo),Repast(repast.github.io/index.html)。该类工具秉承开源理念,用户可根据自身需求进行二次开发。本文构建的仿真程序如图5 和图6 所示。

图5 复杂网络上演化博弈“过程态”
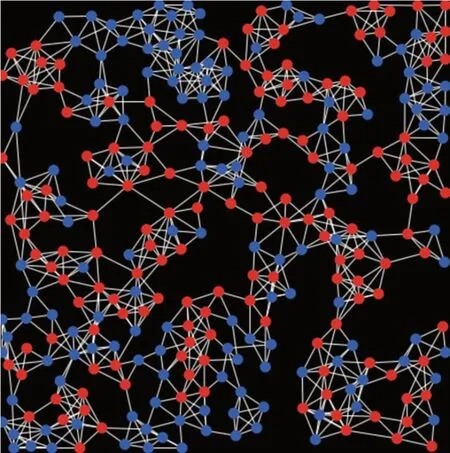
图6 复杂网络上演化博弈“稳定态”
图5 和图6 中的圆点代表联盟中的创新主体,圆点之间的白色连线代表着创新主体间的合作关系。整个复杂网络代表联盟中的创新协作网络。红色圆点代表采取合作态度的创新者,而蓝色圆点代表采取不合作态度的创新者。当联盟采取了合适的治理策略后,博弈初始阶段如图5 所示,网络中只有少部分创新主体采取合作态度,但经过一段时间的演化博弈,创新主体发现持合作态度有利于提高自身收益,纷纷采取合作。合作网络也最终演化到如图6所示的稳定态。在稳定态下,仍然有部分创新主体没有参与合作,但联盟整体上处于较高的合作水平,达到理想预期。
3.2 产业联盟治理策略生成机制的有效性验证
策略选优的过程是基于创新网络的未来演化结果展开的,生成的最优策略具有预见性。采用“对比法”验证策略的有效性。即假设某科研产出高的联盟的治理策略是未知的,尔后生成最优策略,将生成的策略与联盟原有策略作对比,若相近则说明有效;同理,与科研产出较低的联盟进行策略对比,若能补其不足,也说明有效。
基于上述思路,从32 个联盟中挑选了4 个联盟样本,记作A(北京某车辆工程技术创新战略联盟)、B(天津某生物医药装备产业联盟)、C(天津某建筑装备产业联盟)和D(河北某农业装备产业联盟)。其中,联盟中的单位创新产出从A 到D 依次降低。在实验中,采用交叉验证法,即每次验证一个联盟并假设其治理策略未知,而用剩余的31 个联盟的数据作为输入数据。最后,可得到通过该机制生成的4 个治理策略。将A、B、C、D 的原有策略与生成的策略进行对比,如图7 所示。
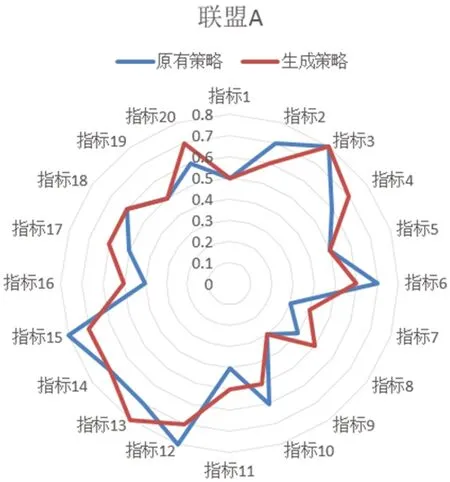
图7 联盟A的原有与生成治理策略对比
从图7 和图8 的结果可知,生成策略与科技产出较高的联盟所采取的治理策略相近,并没有追求所有指标上的高数值,而是追求效益最大化。因此,所生成的策略照顾到了联盟的固有属性和特征,是各方面要素相对均衡的方案。

图8 联盟B的原有与生成治理策略对比
从图9 和图10 结果可知,本文方法能够矫正科技产出较低的联盟采取的治理策略。通过观察和实验生成的治理策略具有如下3 个特点:均衡性、补齐性和关联性。均衡性指各指标施行力度相对均衡,不同类型的指标间差距不会过大;补齐性指对于联盟存在策略短板的情况,可弥补策略缺失;关联性指策略间能相互呼应,达到最佳实施效果。
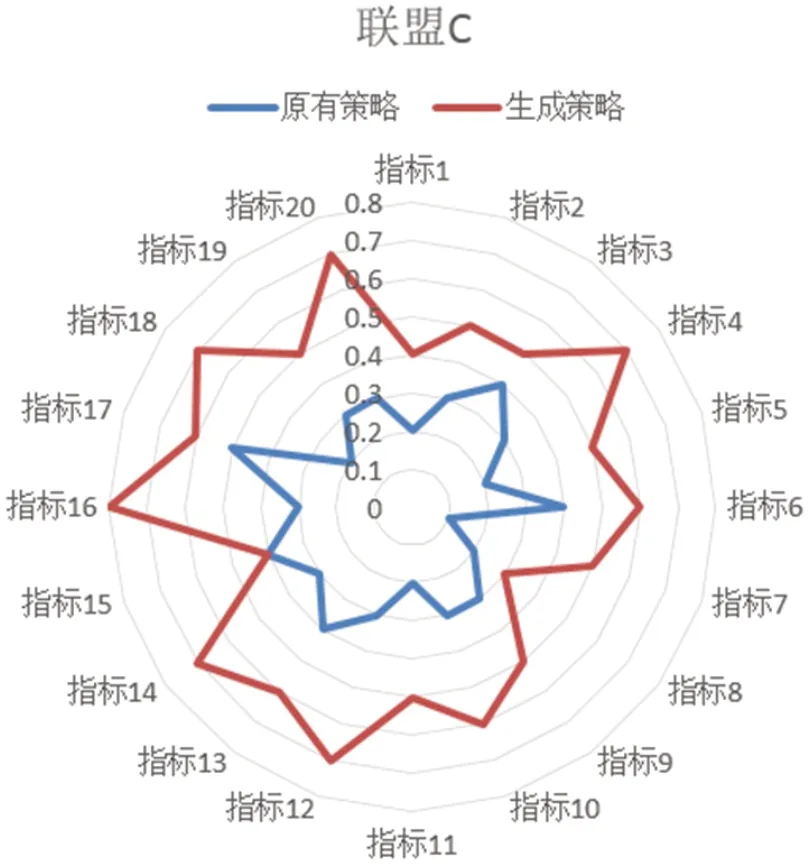
图9 联盟C的原有与生成治理策略对比
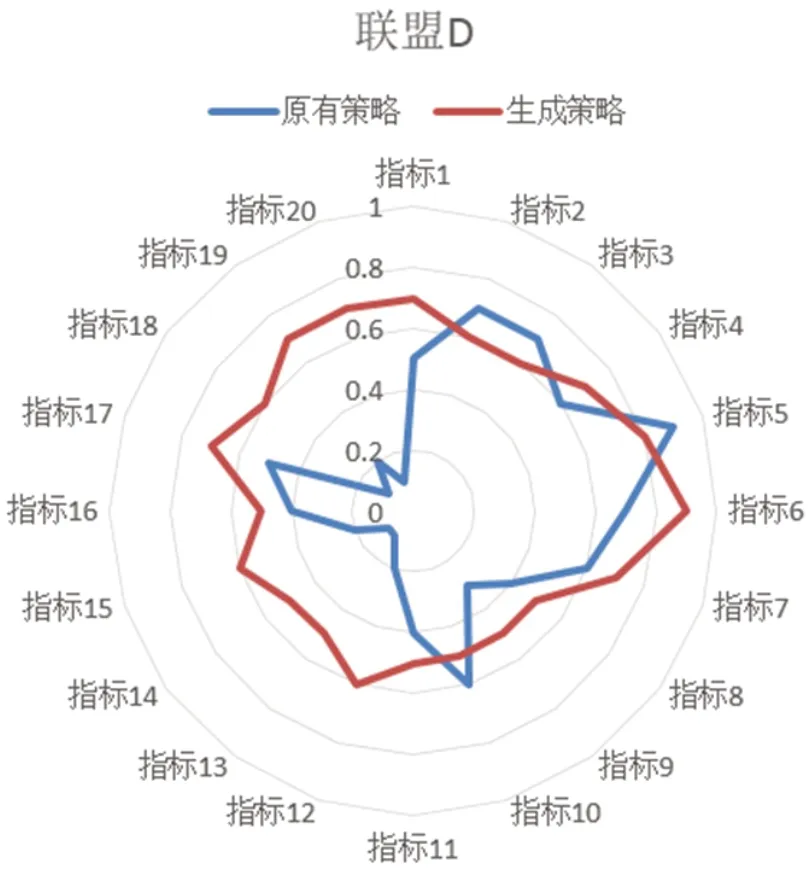
图10 联盟D的原有与生成治理策略对比
4 结论
以构建高端装备制造产业联盟中的协作创新网络为主题展开研究,面向20 个治理策略指标,基于观察法、调查问卷法、专家访谈法研究了京津冀区域32 家装备制造产业联盟的调研数据;然后剖析了治理策略指标的内在关联,挖掘治理策略施行情况与科技产出之间的联系,形成了治理策略的初选与优化方法;构建了复杂网络上的演化博弈仿真工具,得出最优化治理策略生成方法。实验表明方法生成的策略具有有效性,且具备均衡、补齐、关联的特性。由于生成策略是面向未来的网络演化趋势,故而也具有一定的预见性。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
南大法学(2021年3期)2021-08-13
作文成功之路·小学版(2019年8期)2019-09-18
计算机应用(2018年12期)2019-01-08
读者(2017年14期)2017-06-27
自然与文化遗产研究(2016年2期)2016-05-17
读写算(下)(2016年9期)2016-02-27
电子工业专用设备(2015年4期)2015-05-26
集美大学学报(自然科学版)(2015年1期)2015-02-28
山西大同大学学报(社会科学版)(2015年6期)2015-01-22